КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Синтез кулачкового механизма с качающимся толкателем
Известны следующие параметры механизма: график перемещений толкателя (рис. 4.2), минимальный радиус кулачка  , радиус ролика
, радиус ролика  , ход толкателя
, ход толкателя  , межосевое расстояние
, межосевое расстояние  , длина толкателя
, длина толкателя  , скорость кулачка
, скорость кулачка  1/с, направление вращения кулачка – против часовой стрелки.
1/с, направление вращения кулачка – против часовой стрелки.
Требуется построить профиль кулачка.
Выбираем масштабный коэффициент кулачкового механизма  . Это означает, что механизм изображается увеличенным в два раза.
. Это означает, что механизм изображается увеличенным в два раза.
Находим размеры на чертеже
 ,
,  ,
,  ,
,
 .
.
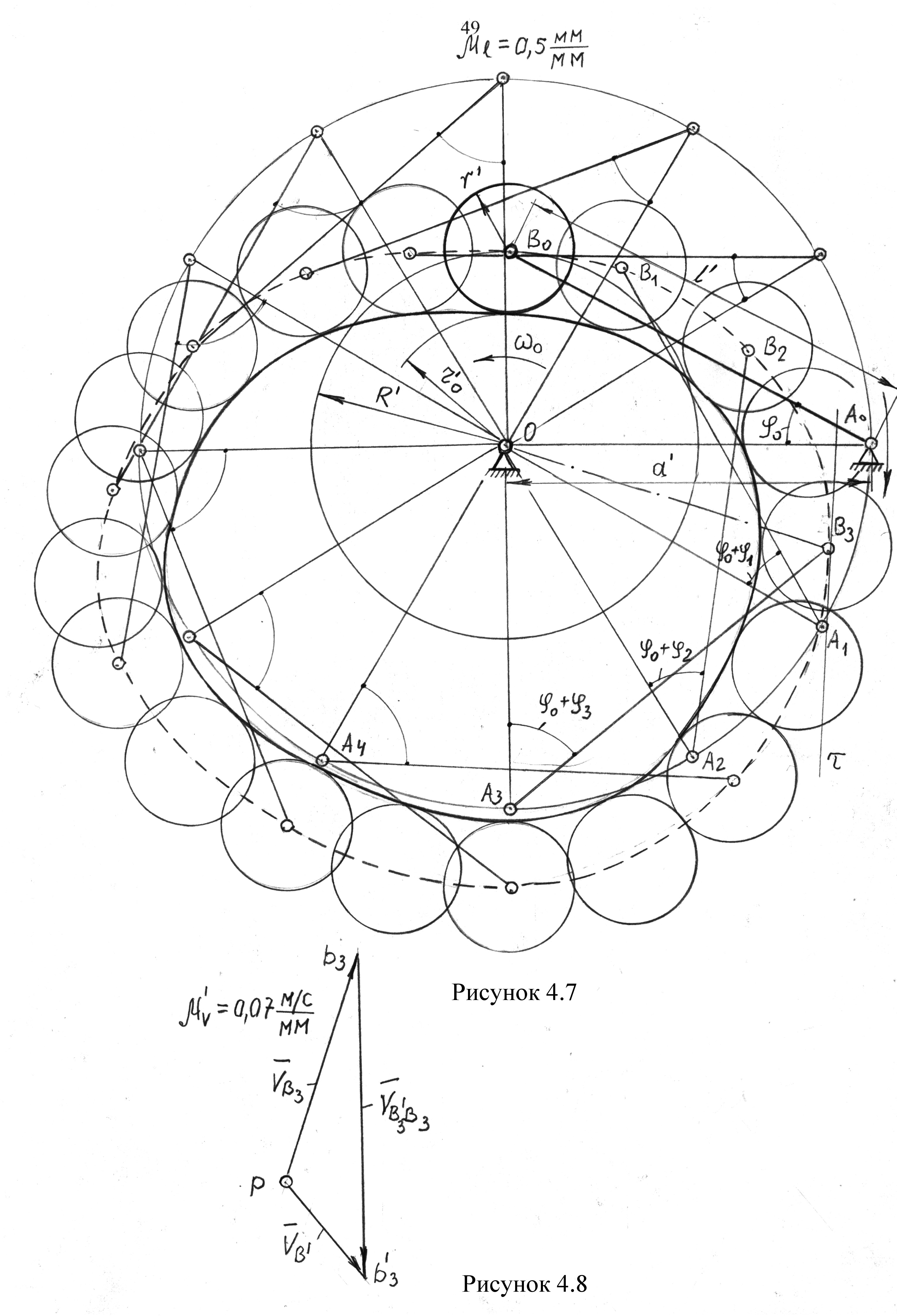
Из произвольной точки О (рис. 4.7) радиусом  , проводим окружность, которую делим на 12 частей, причем нумерацию точек
, проводим окружность, которую делим на 12 частей, причем нумерацию точек  ведем в направлении, обратном направлению вращения кулачка. Все эти точки соединяем с точкой
ведем в направлении, обратном направлению вращения кулачка. Все эти точки соединяем с точкой  . Вычисляем значения углов
. Вычисляем значения углов  из графика перемещений (рис. 4.2) по формуле
из графика перемещений (рис. 4.2) по формуле
 ,
,  и т.д.
и т.д.
Из точки О делаем засечку радиусом  , а из точки
, а из точки  – засечку радиусом
– засечку радиусом  , получая точку
, получая точку  . Замеряем угол
. Замеряем угол  . Из точки
. Из точки  проводим луч под углом
проводим луч под углом  , на котором откладываем величину . Получаем точку
, на котором откладываем величину . Получаем точку  . Из точки
. Из точки  проводим луч под углом
проводим луч под углом  , на котором находим точку
, на котором находим точку  и т.д. Точки
и т.д. Точки  соединяем плавной кривой, получая центровой (теоретический) профиль кулачка. Если расстояние между точками оказывается очень большим, то из кривой перемещений нужно вычислить промежуточное значение угла
соединяем плавной кривой, получая центровой (теоретический) профиль кулачка. Если расстояние между точками оказывается очень большим, то из кривой перемещений нужно вычислить промежуточное значение угла  и найти дополнительную точку В. На теоретическом профиле выбираем несколько точек (12 и более), из которых проводим окружности радиусом
и найти дополнительную точку В. На теоретическом профиле выбираем несколько точек (12 и более), из которых проводим окружности радиусом  . С внутренней стороны к окружностям проводим общую кривую касательную, которая служит рабочим (действительным) профилем кулачка. Действительный профиль кулачка, ролик и толкатель в одном из положений обводим толстыми линиями, а остальные построения — тонкими.
. С внутренней стороны к окружностям проводим общую кривую касательную, которая служит рабочим (действительным) профилем кулачка. Действительный профиль кулачка, ролик и толкатель в одном из положений обводим толстыми линиями, а остальные построения — тонкими.
Для оценки точности построений найдем величину скорости толкателя в одном из положений, например, в третьем. Замеряем длину ординаты (рис. 4.1), которая в данном случае равна  . Следовательно,
. Следовательно,
 1/с.
1/с.
Построим план скоростей механизма для того же положения, используя векторное уравнение
 ,
,
где  – скорость точки
– скорость точки  , принадлежащей кулачку,
, принадлежащей кулачку,
 – скорость точки
– скорость точки  , принадлежащей толкателю.
, принадлежащей толкателю.
Скорость точки определяем по формуле
 ,
,
где  – действительная величина радиуса центрового профиля кулачка.
– действительная величина радиуса центрового профиля кулачка.
Её можно найти через коэффициент, учитывая, что на чертеже  . Следовательно
. Следовательно  .
.
Тогда  .
.
Выбираем масштабный коэффициент  для плана скоростей, изображая вектор отрезком
для плана скоростей, изображая вектор отрезком  .
.
 .
.
Из полюса  (рис. 4.8) проводим вектор
(рис. 4.8) проводим вектор  перпендикулярно
перпендикулярно  в сторону вращения кулачка. В точке центрового профиля проводим касательную
в сторону вращения кулачка. В точке центрового профиля проводим касательную  , которую переносим в точку
, которую переносим в точку  на плане скоростей. Из полюса проводим линию, перпендикулярную толкателю
на плане скоростей. Из полюса проводим линию, перпендикулярную толкателю  . На пересечении ставим стрелки и букву
. На пересечении ставим стрелки и букву  . Получим векторы
. Получим векторы  и
и  . Замеряем длину вектора и вычисляем его модуль
. Замеряем длину вектора и вычисляем его модуль
 .
.
Определяем угловую скорость толкателя
 .
.
После этого заключаем, что угловые скорости толкателя, полученные двумя способами, отличаются друг от друга незначительно, что свидетельствует о высокой точности построений.
Дата добавления: 2015-02-10; просмотров: 147; Мы поможем в написании вашей работы!; Нарушение авторских прав |