КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
в примерах на EXCEL
Приближенные численные методы
Методическое пособие по дисциплине
“Приближенные методы вычислений”
Пособие предназначено для изучения дисциплины “Приближенные методы вычислений”, изучаемой на третьем году обучения для всех направлений бакалавриата, при подготовке к выполнению лабораторных работ. Оно должно дать студенту основные понятия о численных методах с использованием современных компьютеров и доступных программных средств.
Основное внимание уделено тщательно подобранным примерам, позволяющим наиболее ярко проиллюстрировать те или иные особенности каждого метода. Все примеры выполнены на одном из самых мощных современных программных средств - табличном процессоре EXCEL, входящим в состав широко распространенного пакета MICROSOFT OFFICE.
Пособие охватывает основные темы раздела учебной программы указанной дисциплины. Кроме методов, входящих в учебную программу, в пособии описаны алгоритмы и вычислительные процедуры встроенных в EXCEL специальных подпрограмм и функций, позволяющих реализовать те или иные численные методы, например, матричные вычисления, линейный регрессионный анализ, метод сопряженных градиентов, линейное программирование и т.п.
СОДЕРЖАНИЕ
1. РЕШЕНИЕ НЕЛИНЕЙНОГО УРАВНЕНИЯ с одним неизвестным. 5
1.1 Отделение корней.................................................................................................. 5
Пример 1.1.................................................................................................................... 5
1.2 Уточнение корней: метод итераций.................................................................... 6
Пример 1.2.................................................................................................................... 7
1.3 Уточнение корней: метод Ньютона..................................................................... 8
Пример 1.3.................................................................................................................... 9
1.4. Уточнение корней: метод бисекции ( деления отрезка пополам )................ 10
Пример 1.4.................................................................................................................. 10
1.5 Уточнение коней: подпрограмма EXCEL “Подбор параметра”................... 12
2. СИСТЕМЫ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ................. 13
2.1. Матричный метод............................................................................................... 13
Пример 2.1.................................................................................................................. 14
2.2. Метод приближенных вычислений.................................................................. 15
Пример 2.2.................................................................................................................. 16
2.3. Метод Гаусса – Зайделя...................................................................................... 18
Пример 2.3.................................................................................................................. 18
3. РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ.................................. 20
3.1. Выбор начальных приближений....................................................................... 20
Пример 3.1.................................................................................................................. 20
3.2 Метод Ньютона.................................................................................................... 21
Пример 3.2.................................................................................................................. 22
3.3. Метод итераций.................................................................................................. 23
Пример 3.3.................................................................................................................. 24
4. ЧИСЛЕННЫЕ МЕТОДЫ ОДНОМЕРНОЙ ОПТИМИЗАЦИИ..................... 25
4.1. Метод дихотомии................................................................................................ 25
Пример 4.1.................................................................................................................. 26
4.2. Метод золотого сечения..................................................................................... 27
Пример 4.2.................................................................................................................. 28
4.3. Встроенная подпрограмма EXCEL “Поиск решения”.................................... 29
5. МНОГОМЕРНЫЕ ЗАДАЧИ ОПТИМИЗАЦИИ................................................ 30
5.1. Безусловная оптимизация: метод покоординатного спуска.......................... 30
Пример 5.1.................................................................................................................. 31
5.2. Безусловная оптимизация: метод наискорейшего спуска.............................. 32
Пример 5.2.................................................................................................................. 33
5.3. Безусловная оптимизация: подпрограмма EXCEL “Поиск решения”.......... 35
5.4. Условная оптимизация: метод штрафных функций....................................... 35
Пример 5.3.................................................................................................................. 37
5.5. Условная оптимизация: подпрограмма EXCEL “Поиск решения”............... 38
5.6. Условная оптимизация: линейное программирование.................................. 39
Пример 5.4.................................................................................................................. 39
6. МЕТОД НАИМЕНЬШИХ КВАДРАТОВ........................................................... 43
Пример 6.1.................................................................................................................. 44
Пример 6.2.................................................................................................................. 45
7. ВЫЧИСЛЕНИЕ ОПРЕДЕЛЕННЫХ ИНТЕГРАЛОВ..................................... 48
Пример 7.1.................................................................................................................. 49
8. ЧИСЛЕННОЕ РЕШЕНИЕ ОБЫКНОВЕННОГО ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ 51
8.1. Метод Эйлера...................................................................................................... 51
Пример 8.1.................................................................................................................. 51
8.2. Метод Рунге-Кутта четвертого порядка........................................................... 52
Пример 8.2.................................................................................................................. 53
8.3. Метод прогноза и коррекции: метод Адамса................................................... 53
Пример 8.3.................................................................................................................. 54
9. РЕШЕНИЕ СИСТЕМ ОБЫКНОВЕННЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ. 55
9.1. Задача Коши........................................................................................................ 55
Пример 9.1.................................................................................................................. 56
9.2. Краевая задача: метод стрельбы........................................................................ 57
Пример 9.2.................................................................................................................. 57
9.3. Краевая задача: метод прогонки........................................................................ 57
Пример 9.3.................................................................................................................. 58
10. ЧИСЛЕННОЕ РЕШЕНИЕ УРАВНЕНИЙ С ЧАСТНЫМИ ПРОИЗВОДНЫМИ 60
Пример 10.1................................................................................................................ 61
1. РЕШЕНИЕ НЕЛИНЕЙНОГО УРАВНЕНИЯ с одним неизвестным.
Уравнение с одним неизвестным можно записать в каноническом виде
f(x) = 0
Решение уравнения заключается в нахождении корней, т.е. таких значений х, которые обращают уравнение в тождество. В зависимости от того, какие функции входят в уравнение, разделяют два больших класса уравнений - алгебраические и трансцендентные. Функция называется алгебраической, если для получения значения функции по данному значению х нужно выполнить арифметические операции и возведение в степень. К трансцендентным функциям относятся показательная, логарифмическая, тригонометрические прямые и обратные и т.п.
Найти точные значения корней можно лишь в исключительных случаях. Как правило, используются методы приближенного вычисления корней с заданной степенью точности Е. Это означает, что если установлено, что искомый корень лежит внутри интервала [a,b], где a - левая граница, а b - правая граница интервала, и длина интервала (b-a) <= E, то за приближенное значение корня можно принять любое число, находящееся внутри этого интервала.
Процесс нахождения приближенных значений корней разбивается на два этапа: 1) отделение корней и 2) уточнение корней до заданной степени точности. Рассмотрим эти этапы подробнее.
1.1 Отделение корней.
Любой корень уравнения считается отделенным на отрезке [a,b], если на этом отрезке исследуемое уравнение не имеет других корней.
Отделить корни - это значит разбить всю область допустимых значений х на отрезки, в каждом из которых содержится только один корень. Эту операцию можно провести двумя способами - графическим и табличным. Если функция f(x) такова, что можно легко построить качественный график ее изменения, то по этому графику достаточно грубо находятся два числа, между которыми лежит одна точка пересечения функции с осью абсцисс. Иногда с целью облегчения построения, целесообразно представить исходное каноническое уравнение в виде f1(x) = f2(x), затем построить графики этих функций, причем абсциссы пересечения графиков и служат корнями данного уравнения.
При наличии компьютера наиболее распространен табличный способ отделения корней. Он заключается в табулировании функции f(x) при изменении х от некоторого значения хнач до значения хкон с шагом dx. Задача заключается в том, чтобы найти в этой таблице такие два смежных значения х, для которых функция имеет разные знаки. Предположим, что такие два значения a и b=a+dx найдены, т.е. f(a)*f(b)<0. Тогда согласно теореме Больцано-Коши внутри отрезка [a,b], если функция f(x) непрерывна, существует точка с, в которой f(c)=0. EXCEL позволяет легко реализовать оба способа отделения корней. Рассмотрим их на примере.
Пример 1.1.
Требуется отделить корни уравнения
ex-10x = 0
Для этого надо протабулировать функцию f(Х) = exp(Х) - 10*Х, записанную по правилам EXCEL, и построить ее график при изменении Х от какого-то Хнач до Хкон с шагом dХ. Пусть эти значения сначала будут таковы: Хнач = 0, Хкон = 5, dХ = 0,5. Если в этих пределах изменения Х нам не удастся отделить ни одного корня, тогда надо будет задать новые начальное и конечное значения х и, может быть, изменить шаг.

|
Для построения таблицы целесообразно воспользоваться специальной подпрограммой ТАБЛИЦА. Для этого на новом рабочем листе в ячейке B1 введем текст: ОТДЕЛЕНИЕ КОРНЕЙ. Затем в ячейку А2 введем текст: x, а в смежную ей ячейку В2 - текст: f(x). Далее оставим ячейку А3 пустой, но в ячейку В3 введем формулу исследуемой функции по правилам EXCEL, а именно
=EXP(A3)-10*A3
Затем заполним числовой ряд изменений X в строках А4:A14 от 0 до 5 с шагом 0,5.
Выделим блок ячеек А3:B14. Теперь дадим команду меню Данные- Таблица. Результаты табулирования будут помещены в блок ячеек В4:В14. Для того чтобы сделать их более наглядными, нужно отформатировать блок В4:B14 так, чтобы отрицательные числа окрашивались в красный цвет. В этом случае легко найти два смежных значения X, для которых значения функции имеют разные знаки. Их и надо принять за концы интервала отделения корней. В нашем случае таких интервалов, как видно из таблицы два - [0;0,5] и [ 3,5;4].
Далее следует построить график нашей функции, выделив блок А4:B14 и вызвав Мастер Диаграмм. В результате получим на экране диаграмму изменения f(X), из которой видны следующие интервалы отделения корней [0;1] и [3;4].
Если изменять теперь числовые значения х в блоке А4:A14 то значения функции в ячейках B4:B14и график будут изменяться автоматически.

|
1.2 Уточнение корней: метод итераций.
Для уточнения корня методом итераций должно быть задано:
1) уравнение f(X) = 0, причем f(X) должно быть задано в виде формулы,
2) числа a - левая граница и b - правая граница интервала, внутри которого лежит один корень,
3) число Е - заданная точность получения корня.
Сам метод можно разбить на два этапа:
а) переход от канонического вида записи уравнения f(X)=0 к итерирующему виду X = g(X),
б) вычислительная итерирующая процедура уточнения корня.
Перейти от канонического вида уравнения к итерирующему можно различными способами, важно лишь чтобы при этом выполнялось достаточное условие сходимости метода: çg’(X)ç<1 на [a,b], т.е. модуль первой производной итерирующей функции должен быть меньше 1 на интервале [a,b]. Причем чем меньше этот модуль, тем больше скорость сходимости.
Вычислительная процедура метода состоит в следующем. Выбираем начальное приближение, обычно равное Х0 = (a+b)/2. Затем вычислим X1=g(X0) и D= X1- X0. Если модуль D <= E, то X1 является корнем уравнения. В противном случае переходим ко второй итерации: вычисляем Х2=g(X1) и новое значение D=X2- X1. Опять проводим проверку на точность и при необходимости продолжаем итерации. Если g(X) выбрано правильно и удовлетворяет достаточному условию сходимости, то эта итерирующая процедура сойдется к корню. Следует отметить, что от знака g’(X) зависит характер сходимости: при g’(X)>0 сходимость будет монотонной, т.е. с увеличением итераций D будет приближаться к Е монотонно (не меняя знака), в то время как при g’(X)<0 сходимость будет колебательной, т.е. D будет приближаться к Е по модулю, меняя знак на каждой итерации.
Рассмотрим реализацию метода итераций на EXCEL на примере.
Пример 1.2
Уточним методом итераций значение корней, отделенных в примере 2.1. Итак пусть f(X)= exp(X) - 10*X, для первого корня a=0 и b=0,5. Пусть Е=0,00001. Как выбрать итерирующую функцию? Например, так g(X)=0,1*exp(X). На интервале [a,b] çg’(X)ç<1 и достаточное условие сходимости выполняется. Кроме того, эта производная >1 на интервале [a,b] и характер сходимости будет монотонный.

|
Запрограммируем метод итераций для этого примера на том же рабочем листе, где мы проводили отделение корней. В ячейку А22 внесем число, равное 0. В ячейку В22 запишем формулу =0,1*EXP(A22), а в ячейку С22 формулу =А22- В22. Таким образом 22 строка содержит данные по первой итерации. Чтобы получить в строке 23 данные по второй итерации, скопируем содержимое ячейки В22 в ячейку А23, записав в А23 формулу =В22. Далее надо скопировать формулы ячеек В22 и С22 в ячейки В23 и С23. Для получения данных всех остальных итераций надо выделить ячейки А23,В23,С23 и скопировать их содержимое в блок А24:C32. После этого следует проанализировать изменение D = Х - g(X) в столбце С, найти D<0,00001 по модулю и выбрать соответствующее ему значение Х из столбца А. Это и есть приближенное значение корня.

|
Для большей наглядности можно построить диаграмму для метода итераций. Выделяя блок А22:С32 и используя Мастер диаграмм, получим три графика изменения Х,g(X) и D в зависимости от номера итераций, для чего на шаге 3 из 5 выберем формат 2, а на шаге 4 из 5 построения диаграммы нужно отвести ноль столбцов для меток оси Х. Теперь хорошо виден монотонный характер сходимости D.
Для уточнения второго корня этого уравнения на интервале [3,5;4], нужно выбрать другую итерирующую функцию, такую чтобы ее первая производная была по модулю меньше единицы. Выберем g(X)= LN(X)+LN(10). В ячейку А22 внесем новое Х0=3,75, а в ячейку В22 - новую формулу =LN(A22)+LN(10). Скопируем формулу из В22 в блок В23:В32 и сразу получим новые данные и перестроенную диаграмму. Определим приближенное значение второго корня.
1.3 Уточнение корней: метод Ньютона.
Для уточнения корня методом Ньютона должно быть дано:
1) уравнение f(X) = 0, причем f(X) должно быть задано в виде формулы,
2) числа a - левая граница и b - правая граница интервала, внутри которого лежит один корень,
3) число Е - заданная точность получения корня,
4) функция f(X) должна быть дважды дифференцируемой, причем формулы f’(X) и f”(X) должны быть известны.
Метод состоит в итерационных вычислениях последовательности
Xi+1 = Xi - f(Xi)/f’(Xi), где i=0,1,2, ...,
исходя из начального приближения Х0, принадлежащего интервалу [a,b] и удовлетворяющего условию f(X0)*f”(X0)>0. Достаточные условия сходимости метода заключаются в том, что первая и вторая производные исследуемой функции должны сохранять знак на интервале [a,b]. В качестве начального приближения выбирают обычно или a, или b, в зависимости от того, кто из них соответствует формуле выбора Х0.
Метод Ньютона допускает простую геометрическую интерпретацию. Если через точку с координатами (Xi;f(Xi)) провести касательную к кривой f(X), то абсцисса точки пересечения этой касательной с осью 0Х и есть очередное приближение корня Хi+1.
Метод Ньютона можно рассматривать как некоторую модификацию метода итераций, дающую наилучшую итерирующую функцию g(X) на каждом шаге итерации. Проведем следующие преобразования с исходным каноническим уравнением f(X)=0. Умножим левую и правую его части на некоторое число l, отличное от нуля. Затем прибавим слева и справа по Х. Тогда будем иметь
Х = g(X) = Х +l*f(X).
Дифференцируя g(X), получим g’(X) = 1 + l*f’(X). Из достаточного условия сходимости метода итераций çg’(X)ç<1. Потребуем, чтобы на i-том шаге итерации сходимость была самой быстрой, т.е. çg’(Xi)ç =0. Тогда l=-1/ f’(Xi) и мы пришли к методу Ньютона.
Вычислительная процедура метода состоит в следующем. Выбираем начальное приближение X0, обычно равное a или b. Затем вычислим X1= X0 - f(X0)/f’(X0) и D= X1- X0. Если модуль D <= E, то X1 является корнем уравнения. В противном случае переходим ко второй итерации: вычисляем Х2 и новое значение D=X2- X1. Опять проводим проверку на точность и при необходимости продолжаем итерации. Если X0 выбрано правильно, а функция удовлетворяет достаточному условию сходимости, то эта итерирующая процедура быстро сойдется к корню.
Пример 1.3.
Уточним методом Ньютона значение корня, отделенного в примере 1.1. Итак пусть f(X)= exp(X) - 10*X, для первого корня a=0 и b=0,5. Пусть Е=0,00001. Формулы для первой и второй производной f(X) таковы
f’(X) = exp(X) - 10 и f”(X) = exp(X).
Очевидно, что X0 = a = 0, т.к. f(0)*f”(0) = 1 >0.

|
Запрограммируем метод Ньютона для этого примера на том же рабочем листе, где мы проводили отделение корней. В ячейку А42 внесем число, равное Х0=0. В ячейку В42 запишем формулу =EXP(A42)-10*А42, в ячейку С42 формулу =EXP(A42)-10, а в ячейку D42 формулу =А42- В42/C42. Затем в ячейку Е42 запишем формулу =А42-D42. Таким образом 42 строка содержит данные по первой итерации.

|
Чтобы получить в строке 43 данные по второй итерации, скопируем содержимое ячейки D42 в ячейку А43, записав в А43 формулу =D42. Далее надо скопировать формулы ячеек В42, С42, D42, E42 в ячейки В43, С43, D43, E43. Для получения данных всех остальных итераций надо выделить ячейки в 43 строке и скопировать их содержимое в блок А44:Е47. После этого следует проанализировать изменение D в столбце E, найти D<0,00001 по модулю и выбрать соответствующее ему значение Х из столбца А. Это и есть приближенное значение корня. При правильно введенных формулах метод Ньютона сходится за 3 или 4 итерации. Поэтому строить диаграмму для этого метода нет необходимости.
1.4. Уточнение корней: метод бисекции ( деления отрезка пополам ).
Для уточнения корня методом бисекции должно быть дано:
1) уравнение f(X) = 0, причем f(X) должна быть задана в виде формулы,
2) числа a - левая граница и b - правая граница интервала, внутри которого лежит один корень,
3) число Е - заданная точность получения корня.
Напомним, что на концах интервала функция f(X) имеет разные знаки. Вычислительная процедура метода состоит в том, что на каждом шаге итерации на интервале [a,b] выбирают промежуточную точку с так, чтобы она являлясь серединой интервала, т.ет с=(a+b)/2. Тогда интервал разделится этой точкой на два равных отрезка [a,c] и [c,b], длины которых равны (b-a)/2. Из двух полученных отрезков выберем тот, на концах которого функция f(X) принимает значения противоположных знаков. Обозначим его снова как [a,b]. На этом заканчивается первая итерация. Далее новый отрезок [a,b] делим снова пополам и проводим вторую и последующие итерации. Процесс деления отрезка пополам производим до тех пор, пока на каком-либо К-том шаге вновь получающийся отрезок не станет меньше или равным величине точности Е. Значение шага К легко рассчитать из формулы
(b-a)/2k <=E,
где a и b - начальные значения левой и правой границ интервала.
Метод бисекций сходится для любых непрерывных функций, в том числе и недифференцируемых.
Пример 1.4.
Уточним методом бисекции значение корня, отделенного в примере 1.1. Итак пусть f(X)= exp(X) - 10*X, для первого корня a=0 и b=0,5. Пусть Е=0,00001.

|
Запрограммируем метод бисекции для этого примера на том же рабочем листе, где мы проводили отделение корней. В ячейки А52 и В52 надо внести числовые значения a и b,в ячейку С52 - формулу =(А52+В52)/2. Далее в ячейку D52 внесем формулу =EXP(A52)-10*A52, в ячейку Е52 - формулу =EXP(C52)-10*C52, в ячейку F52 - формулу =D52*E52, и, наконец, в ячейку G52 запишем формулу =B52- A52. В строке 52 мы сформировали первую итерацию. На второй итерации значения в ячейках А53 и В53 зависят от знака числа в ячейке F52. Если F52>0, то значение А53 равно С52. В противном случае оно должно быть равно А52. В ячейке В53 наоборот: если F52<0, то значение В53 равно С52, иначе В52.
Разрешить это затруднение поможет встроенная функция EXCEL, которая носит название ЕСЛИ. Сделаем текущей ячейку А53. В строке формул, рядом с зеленой галочкой щелкнем на кнопке с изображением f(x). Так вызывается Мастер Функций. В появившемся диалоге выберем в поле Категории Функции категорию Логические, а в поле Имя Функции - имя ЕСЛИ. На втором шаге диалога заполним три свободных поля следующим образом: в поле Логическое_выражение внесем “F52>0” (разумеется без кавычек!), в поле Значение_если_истина внесем С52, а в поле Значение_если_ложь - А52. Щелкнем по кнопке Закончить. Вот и все.
То же самое надо проделать с ячейкой В53. Только Логическое выражение будет “F52<0”, Значение_если_истина будет С52, а Значение_если_ложь соответственно В52.
Далее надо скопировать формулы в блоке ячеек С52:G52 в блок С53:G53. После этого вторая итерация будет проведена в строке 53. Для получения следующих итераций достаточно скопировать формулы из строки 53 в блоке А53:E53 в блок А54: E68. Затем, как обычно, следует найти с столбце Е такую строку, где значение D будет меньше Е. Тогда число в столбце С в этой строке и есть приближенное значение корня.
Можно построить диаграмму изменения значений в столбцах А, В и С, начиная с первой и кончая последней итерацией. Для этого нужно выделить блок ячеек А52:С68. За дальнейшими инструкциями обратитесь к примеру 1.2.

|
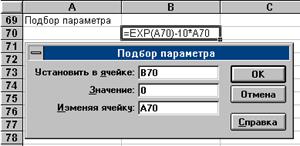
1.5 Уточнение коней: подпрограмма EXCEL “Подбор параметра”.
EXCEL обладает большим набором средств, позволяющих решить те или иные вычислительные задачи. Для решения нелинейного уравнения предусмотрена подпрограмма Подбор параметра. Продемонстрируем действие этой подпрограммы на предыдущем примере.
|
Уточним значение корня, отделенного в примере 1.1. Итак пусть f(X)= exp(X) - 10*X. Найдем корень, лежащий на интервале [0; 0,5]. Оставим пустой ячейку А70. В ячейку В70 запишем формулу =EXP(A70)-10*A70. Выберем команду меню Сервис- Подбор параметра. Откроется диалог Подбор параметра, в котором в поле Установить в ячейке запишем В70, в поле Значение занесем 0 (ноль), в поле Изменяя ячейку укажем А70. Щелкнем по кнопке ОК и появится новый диалог, в котором будет показан результат выполнения операции. В окне Состояние подбора решения будет показано найденное значение. Теперь если щелкнуть на кнопке ОК, в ячейку А70 будет внесено найденное значение корня, а в ячейку B70 - значение функции.
Для того, чтобы найти другой корень, лежащий на интервале [3,5; 4] необходимо изменить начальное приближение, которое в нашей таблице находится в ячейке A70. Запишем в эту ячейку одну из границ интервала, например, 4, и снова выполним процедуру подбора параметра. Содержимое клеток A70 и B70 изменится, теперь в этих клетках появятся координаты большего корня.
2. СИСТЕМЫ ЛИНЕЙНЫХ АЛГЕБРАИЧЕСКИХ УРАВНЕНИЙ
В общем виде система линейных алгебраических уравнений записывается так: a11x1+a12x2+... +a1nxn = b1
a21x1+a22x2+... +a2nxn = b2
....................................................
an1xn+an2x2+... +annxn = bn
Совокупность коэффициентов этой системы запишем в виде квадратной матрицы A из n строк и n столбцов
a11 a12 ... a1n
a21 a22 ... a2n
...........................
an1 an2 ... ann
Используя матричное исчисление, исходную систему уравнений можно записать в виде
А*Х = В,
где Х - вектор- столбец неизвестных размерностью n, аВ - вектор- столбец свободных членов, тоже размерностью n.
Эта система называется совместной, если она имеет хотя бы одно решение, и определенной, если она имеет одно единственное решение. Если все свободные члены равны нулю, то система носит название однородной.
Необходимым и достаточным условием существования единственного решения системы является условие DET=0, где DET - определитель матрицы А. На практике при вычислениях на компьютере не всегда удается получить точное равенство DET нулю. В том случае, когда DET близко к нулю, системы называются плохо обусловленными. При их решении на компьютере малые погрешности в исходных данных могут привести к существенным погрешностям в решении. Условие DET~0 является необходимым для плохой обусловленности системы, но не достаточным. Поэтому при решении системы на ЭВМ требуется оценка погрешности, связанной с ограниченностью разрядной сетки компьютера.
Существуют две величины, характеризующие степень отклонения полученного решения от точного. Пусть Хк - истинное решение системы, Хc - решение, полученное тем или иным методом на ЭВМ, тогда погрешность решения:
Е = Хк - Хc. Вторая величина - невязка, равная R = B - A*Xc. В практических расчетах контроль точности осуществляется с помощью невязки, хотя это и не совсем корректно.
2.1. Матричный метод.
EXCEL дает возможность решить систему линейных алгебраических уравнений матричным методом, т.е.
Х = А-1*В.
Таким образом, алгоритм решения системы матричным методом можно представить в виде следующей последовательности вычислительных процедур:
1) получить матрицу А-1, обратную матрицеА;
2) получить решение системы по формуле Хс = А-1*В;
3) вычислить новый вектор свободных членов Вс = А*Хс;
4) вычислить невязку R = B - Bc;
5) получить решение системы по формулеdXc = А-1*R;
6) сравнить все компоненты вектора dXc по модулю с заданной погрешностью Е: если все они меньше Е, то закончить вычисления, иначе повторить вычисления с п.2, гдеХс = Xc + dXc.
Рассмотрим матричный метод решения системы с помощью EXCEL на примере.
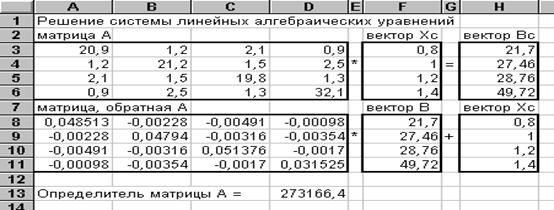
Пример 2.1.
Решить систему уравнений
20,9x1+ 1,2x2 + 2,1x3+ 0,9x4 = 21,7
1,2x1+21,2x2 + 1,5x3+ 2,5x4 = 27,46
2,1x1+ 1,5x2 +19,8x3+ 1,3x4 = 28,76
0,9x1+ 2,5x2 + 1,3x3+32,1x4 = 49,72
EXCEL имеет следующие встроенные функции, реализующие матричные вычисления:
а) МОБР - обращение матрицы,
б) МУМНОЖ - умножение двух матриц,
в) МОПРЕД - вычисление определителя матрицы.
При использовании этих функций важно правильно и компактно расположить на рабочем листе блоки ячеек, соответствующие исходным и рабочим матрицам и вектор-столбцам. Откроем новый рабочий лист, щелкнув на выбранном Вами ярлычке. Отведем под матрицу А блок ячеек А3:D6. Для наглядности заключим его в черную рамку. Для этого выделим блок A3:D6, дадим команду меню Формат- Ячейки и в открывшемся диалоге выберем вкладку Рамка. Откроется новый диалог, в котором щелкнем по полю Рамка- Контур и выберем в поле Рамка- Стиль самую толстую ширину линии. Подтвердим свое решение, щелкнув на кнопке ОК. Выделим теперь блок A8:D11 под матрицу А-1 и также заключим его в черную рамку, проделав действия, аналогичные блоку матрицы А. Далее выделим блоки ячеек под вектор-столбцы (обведя их черной рамкой): блок F8:F11 - под векторВ, блок H8:H11 - под вектор Хс, получающийся в результате умножения А-1*В, блок H3:H6 - под вектор Вс, получающийся в результате умноженияА*Хс, причем для наглядности выделим дополнительный блок F3:F6, куда скопируем компоненты вектора Хс из блока H8:H11. И наконец, занесем в ячейки Е4 и Е9 знак умножения *, а в ячейки G4 и G9 знак равенства =, затем, выделяя по очереди столбцы Е и G, дадим команду меню Формат- Столбец - Подгон ширины. Таким образом мы подготовили рабочий лист к решению нашей задачи.
Внесем исходные данные: числа матрицы А в ячейки блока A3:D6, а числа вектора свободных членовВ - в ячейки блока F8:F11.
|
Начнем выполнение алгоритма с обращения матрицы А. Для этого выделим блок А8:D11, куда должен быть помещен результат операции. Этот блок окрасится в черный цвет, за исключением ячейки А8. Щелкнем по кнопке fx на панели Стандартная, осуществив вызов Мастера Функций. Откроется диалог, в котором из поля Категория функций выберем строку Мат. и тригонометрия, а из поля Имя функции - строку МОБР. Перейдем ко второму шагу диалога, щелкнув по кнопке Шаг>. Здесь в поле Массив надо набить с клавиатуры А3:D6, что соответствует блоку ячеек, занятому матрицей А. Щелкнув на кнопке Закончить, можно увидеть, что в блоке А8:D11 заполнена лишь ячейка А8. Для завершения операции обращения EXCEL требует выполнения еще двух действий. Сначала надо сделать активной строку формул, щелкнув по ней ( в любом месте строки!) - курсор мыши примет при этом форму I. Проверкой правильности Ваших действий будет появление слева от строки формул четырех кнопок, в том числе с зеленой галочкой. После этого следует нажать на клавиатуре клавишу “Ctrl”, затем не отпуская ее - клавишу “Shift”, и не отпуская и ее - клавишу “Enter”, т.е. в результате должны быть нажаты все три клавиши одновременно! Вот теперь весь блок А8:D11 будет заполнен числами и можно выделить блок H8:H11, чтобы начать операцию умножения А-1*В.
Выделив этот блок, снова вызовите Мастер функций и в поле Имя функции - выбирайте функцию МУМНОЖ. Щелкнув по кнопке Шаг>, перейдем ко второму шагу диалога, где в поле Массив1 внесем адрес А8:D11, а в поле Массив2 - адрес F8:F11. Щелкнем по кнопке Закончить и обнаружим, что в блоке Н8:H11 заполнена лишь ячейка Н8. Активизируем строку формул ( должна появиться зеленая галочка!) и по методике, описанной выше, нажмем одновременно три клавиши “Ctrl”-”Shift”-”Enter”. Результат умножения появится в блоке Н8:H11.
Для проверки точности полученного решения системы, проведем операцию вычисленияВс=А*Хс. С этой целью скопируем только числовые значения ( а не формулы!) ячеек из блока H8:H11 в ячейки F3:F6. Сделать это надо следующим образом. Выделим блок H8:H11. Дадим команду меню Правка- Копировать. Выделим блок F3:F6. Дадим команду меню Правка- Специальная вставка. Откроется диалог, в котором в поле Вставить следует выбрать режим Значения. Подтвердим свое решение, щелкнув по кнопке ОК.
После этой операции заполнены числами блоки А3:D6 и F3:F6. Можно приступить к умножению матрицы А на вектор Хс. Для этого надо выделить блок Н3:H6, вызвать Мастер Функций и, действуя так же, как и при вычислении Хс=А-1*В, получить Вс. Как видно из таблицы, числовые значения векторов В и Вс совпадают, что говорит о хорошей точности вычислений, т.е. невязка в нашем примере равна нулю.
Подтвердим хорошую обусловленность матрицы А вычислением ее определителя. Для этого сделаем активной ячейку D13. С помощью Мастера Функций вызовем функцию МОПРЕД. В поле массив занесем адрес блока А3:D6. Щелкнув по кнопке Закончить, получим в ячейке D13 числовое значение определителя матрицы А. Как видно, оно значительно больше нуля, что говорит о хорошей обусловленности матрицы.
2.2. Метод приближенных вычислений.
Одним из наиболее распространенных итерационных методов решения систем линейных алгебраических уравнений, отличающийся простотой и легкостью программирования, является метод приближенных вычислений или метод Якоби.
Пусть надо решить систему
a11x1+a12x2+a13x3 = b1
a21x1+a22x2+a23x3 = b2
a31x1+a32x2+a33x3 = b3
Предположим, что диагональные элементы a11, a22, a33 отличны от нуля. В противном случае можно переставить уравнения. Выразим переменные из первого, второго и третьего уравнений соответственно. Тогда
x1 = [b1-( a12x2+a13x3)]/ a11
x2 = [b2-( a21x1+a23x3)]/ a22
x3 = [b3-( a31x1+a33x3)]/ a33
Зададим начальные приближения неизвестных
x1 = x1 (0)
x2 = x2 (0)
x3 = x3 (0)
Подставляя их в правую часть преобразованной системы, получим новое первое приближение
x1(1) = [b1-( a12x2(0)+a13x3(0))]/ a11
x2 (1)= [b2-( a21x1(0)+a23x3(0))]/ a22
x3 (1)= [b3-( a31x1(0)+a33x3(0))]/ a33
На этом заканчивается первая итерация. Далее, используя вычисленные значения x1(1), x2 (1) и x3 (1), можно провести следующую итерацию, чтобы найти x1(2),x2(2) и x3 (2), Итерационный процесс продолжается до тех пор, пока на какой-либо k-той итерации все значения xi(k) не станут близкими к xi(k-1). Близость этих значений можно характеризовать максимальной абсолютной величиной их разности D. Тогда при заданной допустимой погрешности Е критерий окончания итерационного процесса можно записать так
D = max [ABS(xi(k) - xi(k-1))] <=E для i=1,2,3.
Достаточные условия сходимости итерационного процесса
 где j#i , i=1,2,3
где j#i , i=1,2,3
При этом хотя бы для одного уравнения неравенство должно выполняться строго.
Пример 2.2.
Решим систему примера 2.1 методом Якоби.
Дано:
система уравнений
20,9x1+ 1,2x2 + 2,1x3+ 0,9x4 = 21,7
1,2x1+21,2x2 + 1,5x3+ 2,5x4 = 27,46
2,1x1+ 1,5x2 +19,8x3+ 1,3x4 = 28,76
0,9x1+ 2,5x2 + 1,3x3+32,1x4 = 49,72
начальные приближения
x1 (0)= b1=21,7
x2 (0)= b2=27,46
x3 (0)= b3=28,76
x4 (0)= b4=49,72
допустимая погрешность
Е = 1Е –5.
Очевидно, что достаточные условия сходимости метода выполняются. Откроем новый рабочий лист EXCEL. Внеся в ячейку А1 текст с названием метода, отведем вторую строку для заголовка таблицы
| Ячейка | Текст заголовка |
| А2 | № итерации |
| В2 | Х1 |
| С2 | Х2 |
| D2 | X3 |
| E2 | X4 |
| F2 | DX1 |
| G2 | DX2 |
| H2 | DX3 |
| I2 | DX4 |
| J2 | D |
Следующая третья строка должна содержать информацию о нулевой итерации, т.е. в ячейку А3 занесем ноль, а в ячейки В3, С3, D3 и E3 – начальные приближения, равные значениям свободных членов уравнения.
Четвертая строка будет содержать формулы для вычисления первой итерации
| Ячейка | Формула |
| А4 | |
| В4 | =(21,7 – (1,2*C3+2.1*D3+0.9*E3))/20.9 |
| С4 | =(27.46-(1.2*B3+1.5*D3+2.5*E3))/21.2 |
| D4 | =(28.76-(2.1*B3+1.5*C3+1.3*E3))/19.8 |
| E4 | =(49.72-(0.9*B3+2.5*C3+1.3*D3))/32.1 |
| F4 | =ABS(B4-B3) |
| G4 | =ABS(C4-C3) |
| H4 | =ABS(D4-D3) |
| I4 | =ABS(E4-E3) |
| J4 | =МАКС(F4:I4) |
Для проведения остальных итераций следует скопировать формулы ячеек B4:J4 в нижние строки с 5 по, например, 15. Если числовые значения в столбце J будут меньше Е, решение найдено. В противном случае следует продолжить копирование. Результат решения показан на рисунке.

2.3. Метод Гаусса – Зайделя.
Этот метод является модификацией метода приближенных вычислений и отличается от него формулами вычислений первого и последующего приближений.
Пусть надо решить систему
a11x1+a12x2+a13x3 = b1
a21x1+a22x2+a23x3 = b2
a31x1+a32x2+a33x3 = b3
Предположим, что диагональные элементы a11, a22, a33 отличны от нуля. В противном случае можно переставить уравнения. Выразим переменные из первого, второго и третьего уравнений соответственно. Тогда
x1 = [b1-( a12x2+a13x3)]/ a11
x2 = [b2-( a21x1+a23x3)]/ a22
x3 = [b3-( a31x1+a33x3)]/ a33
Зададим начальные приближения неизвестных
x1 = x1 (0)
x2 = x2 (0)
x3 = x3 (0)
Подставляя их в правую часть преобразованной системы, получим новое первое приближение
x1(1) = [b1-( a12x2(0)+a13x3(0))]/ a11
x2 (1)= [b2-( a21x1(1)+a23x3(0))]/ a22
x3 (1)= [b3-( a31x1(1)+a33x3(1))]/ a33
На этом заканчивается первая итерация. В отличии от метода Якоби, здесь использовались не только начальные приближения, но и уже вычисленные значения неизвестных на первой итерации. Далее, используя вычисленные значения x1(1), x2 (1) и x3 (1), можно провести следующую итерацию, чтобы найти x1(2),x2(2) и x3 (2), Итерационный процесс продолжается до тех пор, пока на какой-либо k-той итерации все значения xi(k) не станут близкими к xi(k-1). Близость этих значений можно характеризовать максимальной абсолютной величиной их разности D. Тогда при заданной допустимой погрешности Е критерий окончания итерационного процесса можно записать так
D = max [ABS(xi(k) - xi(k-1))] <=E для i=1,2,3.
Достаточные условия сходимости итерационного процесса
где j#i , i=1,2,3
При этом хотя бы для одного уравнения неравенство должно выполняться строго.
Пример 2.3.
Решим систему примера 2.1 методом Гаусса-Зайделя. При этом оформление листа EXCEL останется тем же. Изменятся лишь формулы в четвертой и последующих строках.
| Ячейка | Формула |
| А4 | |
| В4 | =(21,7 – (1,2*C3+2.1*D3+0.9*E3))/20.9 |
| С4 | =(27.46-(1.2*B4+1.5*D3+2.5*E3))/21.2 |
| D4 | =(28.76-(2.1*B4+1.5*C4+1.3*E3))/19.8 |
| E4 | =(49.72-(0.9*B4+2.5*C4+1.3*D4))/32.1 |
| F4 | =ABS(B4-B3) |
| G4 | =ABS(C4-C3) |
| H4 | =ABS(D4-D3) |
| I4 | =ABS(E4-E3) |
| J4 | =МАКС(F4:I4) |
Для проведения остальных итераций следует скопировать формулы ячеек B4:J4 в нижние строки с 5 по, например, 15. Если числовые значения в столбце J будут меньше Е, решение найдено. В противном случае следует продолжить копирование. Результат решения показан на рисунке.

Как видно, в данном случае метод Гаусса – Зайделя оказался быстрее метода приближенных вычислений.
3. РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ
Система нелинейных уравнений в общем виде записывается так
f1(x1,x2,...xn) = 0
f2(x1,x2,...xn) = 0
..............................
fn(x1,x2,...xn) = 0
где fi - нелинейные алгебраические функции. Для решения таких систем обычно используются итерационные методы. Ниже будут рассмотрены два метода - метод Ньютона и метод итераций. Успех применения этих методов во многом определяется выбором начальных приближений. Они должны быть достаточно близки к истинному значению. В противном случае итерационный процесс может не сойтись. Следует заметить, что в общем случае формализованных процедур выбора начальных приближений нет. Только в случае системы второго порядка можно предложить такую процедуру, сравнительно легко реализующуюся на EXCEL.
3.1. Выбор начальных приближений.
Пусть задана система нелинейных уравнений 2-го порядка
f1(x1,x2) = 0
f2(x1,x2) = 0
Зададим несколько значений x1 в диапазоне от хнач до хкон с шагом dx. Подставим сначала в f1(x1,x2) = 0 значение хнач. Тогда это уравнение становится одномерным, зависящим только от х2, и его можно решить подпрограммой EXCEL Подбор параметра (см. 2.4). То же самое можно проделать и для всех остальных значений х1. В результате мы будем иметь набор значений х1 и х2, для которых f1(x1,x2) = 0. Далее, для того же самого набора значений х1, используя подпрограмму Подбор параметра, найдем значения х2, для которых f2(x1,x2) = 0. Если теперь построить с помощью EXCEL графики изменения х2 в зависимости от х1 для двух этих случаев, то на пересечении этих графиков можно приближенно определить значения начальных приближений по х1 и х2. Если графики не пересекаются, следует задать новый диапазон изменения х1 и повторить процедуру сначала.
Пример 3.1.
Пусть надо решить систему
х13 + х23 - 6х1 + 3 = 0
х13 - х23 - 6х2 + 2 = 0
Подберем начальные приближения. Выберем хнач = 0, хкон = 1, dx = 0,2. Откроем новый рабочий лист EXCEL и занесем эти значения х1 в блок А4:A9. Выделим блок В4:В9 под значения х2 первой серии, для которой f1(x1,x2) = 0, и блок С4:С9 - под значения х2 второй серии, для которой f2(x1,x2) = 0. Блок D4:D9 отведем для функции f1(x1,x2), а блок Е4:Е9 - для функции f2(x1,x2) . Сделаем текущей ячейку D4. В нее запишем формулу =А4^3+B4^3-6*A4+3. В ячейку Е4 запишем формулу =A4^3-C4^3-6*C4+2. Теперь выделим блок D4:E4 и скопируем эти формулы в блок ячеек D5:E9. Разумеется, адреса ячеек столбцов А и С в них будут автоматически изменены.
Перейдем к заполнению блока В4:В9. Снова сделаем текущей ячейку D4. Дадим команду меню Сервис- Подбор параметра. В открывшемся диалоге в поле Установить в ячейке должен быть указан адрес ячейки D4 в абсолютных адресах. В поле Значение следует занести ноль, а в поле Изменяя ячейку - занести адрес ячейки В4 ( можно в относительных адресах). Щелкнем по кнопке ОК. Появится новый диалог Состояние подбора параметра. Если решение найдено, то, щелкнув по кнопке ОК, получим в ячейке B4 нужное нам числовое значение. Далее эту процедуру надо повторить для всех ячеек блока D4:D9. В результате будет заполнен блок В4:В9.
Аналогичным образом следует заполнить блок С4:С9, используя блок Е4:Е9.

|
Если блоки в столбцах В и С заполнены, можно построить диаграмму. Для этого необходимо выделить блок А3:Е9. Затем щелкнуть по кнопке Мастер Диаграмм на панели Стандартная. Передвигаясь по диалогу с помощью кнопки Шаг>, выполнить все 5 шагов построения диаграммы, причем на Шаге 2 из 5 выбрать тип XY-точечная, а на Шаге 3 из 5 - формат 6. Анализируя построенную диаграмму, можно сделать вывод о том, что в качестве начальных приближений можно выбрать х1 =0,5 и х2 = 0,5.
3.2 Метод Ньютона.
Пусть задана система нелинейных уравнений 2-го порядка
f1(x1,x2) = 0
f2(x1,x2) = 0
причем левые части уравнений известны в виде формул. Заданы также числовые значения начальных приближений х10 и х20, а также Е - точность вычислений значений корней. Функции должны быть дифференцируемы и формулы частных производных тоже должны быть известны.
Исходную систему можно записать в матричном виде
F(X) = 0,
где X - двумерный вектор- столбец с компонентами { x1,x2 }, а F - двумерный вектор- функция. Метод Ньютона - это метод последовательных приближений по формуле
Хi+1 = Xi - Pi,
где Pi = Ji-1*Fi ,
i - номер итерации, ( i = 0,1,2,...)
Ji-1 - матрица, обратная матрице J на i-той итерации,
J- матрица Якоби, т.е. матрица первых частных производных:
df1/dx1 df1/dx2
df2/dx1 df2/dx2.
Таким образом на каждой итерации вычисляется вектор Р, его компоненты сравниваются с заданной погрешностью Е по формуле
D=( p1i2+p2i2)(1/2),
причем когда D <= E , вычисления прекращаются и вектор Хi считается решением. В противном случае вычисляются новые значения Х и выполняется следующая итерация.
Достаточным условием сходимости метода служит неособенность матрицы Якоби, т.е. ее определитель (якобиан) не должен быть равным нулю на любой итерации.
Пример 3.2.
Решим систему из примера 3.1 методом Ньютона. Начальные приближения также возьмем из того же примера. Пусть Е = 0,00001. Выпишем формулы частных производных:
df1/dx1 = 3x12 - 6 df1/dx2 = 3x22
df2/dx1 = 3x12 df2/dx2 = -3x22 - 6.
Для решения задачи воспользуемся встроенными в EXCEL матричными функциями и процедурами так, как это сделано в разделе 2 настоящего пособия при решении систем линейных уравнений.

|
Проведем вычисления на том же рабочем листе, что и в примере 3.1. Необходимо отвести блоки ячеек для векторов Х,F и P, для матриц J иJ-1, а также ячейки для вычисления якобиана и текущей величины погрешности D. Затем занести начальные приближения в блок Х и формулы в блокиJ иF. Далее с помощью Мастера функций надо организовать вычисление якобиана функцией МОПРЕД , матрицы J-1 - функцией МОБР и вектора Р - функцией МУМНОЖ по аналогии с примером 2.1. В результате будет выполнена первая итерация метода Ньютона и по численному значению D следует принять решение о проведении дальнейших итераций.

|
Из таблицы ясно, что D>E и дальнейшие итерации необходимы. По формуле Ньютона для получения новых числовых значений вектора Х нужно из значений блока Хвычесть значения блока Р. Это можно выполнить таким образом. Выделим блок Ри дадим команду меню Правка- Копировать. Затем выделим блок Хи дадим команду меню Правка- Специальная вставка. В появившемся диалоге выберем в поле Вставить переключатель Значения, а в поле Операция - переключатель Вычесть и подтвердим свой выбор щелчком по кнопке ОК. В результате будет выполнена вторая итерация. Блок ячеек Р будет обрамлен бегущей пунктирной линией. Если значение D получится все еще большим чем Е, то следует снова выделить блок Х и повторить команду меню Правка- Специальная вставка с указанием тех же переключателей. Эти манипуляции можно проводить до тех пор, пока D не станет меньше, чем Е. Во время проведения итераций нужно визуально контролировать числовое значение якобиана для выполнения достаточных условий сходимости метода.
3.3. Метод итераций.
Пусть задана система нелинейных уравнений 2-го порядка
f1(x1,x2) = 0
f2(x1,x2) = 0
причем левые части уравнений известны в виде формул. Заданы также числовые значения начальных приближений х10 и х20, а также Е - точность вычислений значений корней.
Для применения итераций исходная система приводится к виду
х1 = g1(x1,x2)
x2 = g2(x1,x2),
где функции gi называются итерирующими. Алгоритм решения задается итерирующими формулами
х1i+1 = g1(x1i,x2i)
x2i+1 = g2(x1i,x2i),
где i -номер итерации, i = 0,1,2,... Для прекращения итераций вычисляются значения
p1i+1 = х1i+1 - x1i
p2i+1 = x2i+1 - x2i,
D=( p1i2+p2i2)(1/2),
и D сравнивается с Е. Итерации продолжаются до тех пор, пока не выполнится условие D<=E. Чтобы процесс вычислений сходился к этому условию, нужно выполнениедостаточного условия сходимости:
çdg1/dx1ç + çdg1/dx2ç < 1,
çdg2/dx1ç + çdg2/dx2ç < 1.
Возможно также суммирование по столбцам.
Пример 3.3.
Решим систему из примера 3.1 методом итераций. Начальные приближения также возьмем из того же примера. Пусть Е = 0,00001. Выпишем формулы для итерирующих функций
g1(x1,x2) = (x13 + x23 + 3)/6
g2(x1,x2) = (x13 - x23 + 2)/6.
При изменении независимых переменных в пределах 0<= x1<=1 и 0<= x2<=1 достаточное условие сходимости выполняется, т.к.
çdg1/dx1ç + çdg1/dx2ç = (x12)/2 + (x22)/2,
çdg2/dx1ç + çdg2/dx2ç = (x12)/2 + ç-(x22)/2ç.
Проведем вычисления на том же рабочем листе, что и в примере 4.2.
Отведем столбец А, начиная с 26 строки под значения х1, столбец В под значения х2, столбец С - под g1, столбец D - под g2, следующие три столбца под р1,р2 и D.

|
В строке 27 сформируем формулы для второй итерации, а затем скопируем их в блок А28:G32, с учетом изменений относительных адресов ячеек. В результате будем иметь заполненную таблицу

|
Как видно, процесс итераций сходится достаточно быстро.
4. ЧИСЛЕННЫЕ МЕТОДЫ ОДНОМЕРНОЙ ОПТИМИЗАЦИИ
Одномерная задача оптимизации в общем случае формулируется следующим образом: найти значение независимой переменной Х, заданной на интервале[a,b], при котором некоторая целевая функция f(X) принимает минимальное значение. Если ставится задача нахождения максимума, например, функции g(X), то преобразованием f(X) = - g(X) она приводится к отысканию минимума f(X). Целевая функция f(X) должна быть задана в виде формулы. Если существует производная f’(X), то задача сводится к решению уравнения f’(X) = 0, например, методами, описанными в разделе 2.
Численные методы оптимизации используются тогда, когда целевая функция недифференцируема и, в общем случае, может быть не гладкой и даже непрерывной, т.е. может иметь разрывы первого рода по Дирихле.
Единственное условие, предъявляемое к целевой функции - она должна быть унимодальной на интервале [a,b], т.е. иметь на этом интервале только один минимум и не иметь ни максимумов, ни точек перегиба. Математически свойство унимодальности записывается так. Функция f(X) называется унимодальной на интервале [a,b], если на этом интервале существует такая точка Х*, что для значений Х
X1<X2<X*<X3<X4
выполняется условие
f(X1)>f(X2)>f(X*)<f(X3)<f(X4).
В этом определении очень важно, что все неравенства - строгие.
Процесс нахождения минимума унимодальной функции численными методами оптимизации, называемыми иногда методами поиска, состоит в последовательном сужении интервала [a,b] - начального интервала неопределенности - так, чтобы его длина достигала значения Е - заданной погрешности решения.

|
Алгоритм сужения интервала [a,b] называется стратегией поиска. Заметим, что если выбрать два любых значения Х1 и Х2 на интервале [a,b] и вычислить для них значения функции f(X1) и f(X2), то сравнивая эти значения по величине и используя свойство унимодальности, всегда можно сократить начальный интервал неопределенности, отбрасывая отрезок [a,X1] или отрезок [X2,b]. Таким образом, стратегии поиска отличаются правилами выбора значений Х1 и Х2 на интервале [a,b]. Далее будут рассмотрены три метода одномерной оптимизации.
4.1. Метод дихотомии.
Для использования метода дихотомии должно быть дано:
а) формула целевой функции f(X),
б) численные значения а - левой границы и b - правой границы начального интервала неопределенности, на котором целевая функция унимодальна,
в) численное значение Е - точности нахождения значения Х, при котором f(X) принимает минимальное значение на [a,b].
Сущность метода состоит в том, что выбираются значения Х1 и Х2 так, чтобы они были как можно ближе к середине интервала неопределенности с=(a+b)/2. Обычно Х1 = с-r и Х2 = c+r, где r = E/3 или E/4 в зависимости от точности вычислений компьютера. Таким образом, на каждой итерации отбрасывается отрезок длиной (c-r), почти равной половине интервала неопределенности. Через К итераций начальный интервал неопределенности уменьшится до длины
d = (b-a)/2K + r(2K - 1)/2(K-1) .
Итерации прекращаются, если d <= E.
Итак, алгоритм метода дихотомии состоит в следующем.
1) для заданных значений a и b вычисляются с=(a+b)/2, X1 = c-E/3 и X2=c+E/3,
2) вычисляются значения f(X1) и f(X2) и сравниваются между собой,
3) если f(X1) > f(X2), то а= X1, иначе b= X2,
4) если длина нового интервала d=(b-a) <=E, то вычисления останавливаются и в качестве решения можно взять любое значение Х, лежащее внутри этого интервала; в противном случае выполняется новая итерация.
Пример 4.1.
Пусть надо найти минимум функции f(X) = 2X2 + e-X. По правилам EXCEL эта функция должна быть записана так =2*Х^2 + EXP(-X), где вместо Х нужно подставить тот или иной адрес ячейки. Зададим
Дата добавления: 2015-02-10; просмотров: 645; Мы поможем в написании вашей работы!; Нарушение авторских прав |
| <== предыдущая лекция | | | следующая лекция ==> |
| Прогнозирование использования земельных ресурсов в населенных пунктах (по курсовой работе) | | | Задание 1 – Элементы электронных устройств |