КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Магнитные и емкостные датчики
К магнитным относят датчики, в которых реализуется взаимосвязь между магнитным полем и контролируемой входной величиной (неэлектрической или электрической).
Индуктивные и трансформаторные датчики используют в своей работе явление изменения индуктивности или взаимоиндуктивности катушки со стальным сердечником при перемещении подвижной части магнитной системы (стального ярма). Они получили очень широкое распространение благодаря простоте и надежности конструкции, большой мощности на выходе и отсутствию подвижных контактов. Индуктивные и трансформаторные датчики действуют от сети переменного тока на частотах от 50 Гц до нескольких килогерц и способны измерять линейные и угловые перемещения в диапазоне от десятых долей микрона до нескольких десятков миллиметров.
В простейшем индуктивном датчике с плоским подвижным якорем, схема и характеристика которого приведены на рисунке 67, а и б, входной величиной является изменение воздушного зазора δ, а выходной — ток Іп во вторичном приборе П. Сила тока Іп зависит от индуктивного сопротивления обмотки и активных сопротивлений обмотки и прибора. Индуктивное сопротивление прибора много меньше, чем датчика, и им можно пренебречь. Индуктивность (Г) катушки с учетом двух воздушных зазоров определяется по приближенной формуле
L =  (43)
(43)
а ток (А) на выходе
Iп =  /44)
/44)
где R = Rоб+ R п— суммарное активное сопротивление обмотки и вторичного прибора, Ом;
ωL-индуктивное сопротивление обмотки, Ом;
ω – число витков катушки;
Ѕ — поперечное сечение магнитопровода, м2;
δ — воздушный зазор, м.
Чувствительность (А/м) датчика без учета активного сопротивления:
 (45)
(45)
Простейший плоскостной датчик применяется очень редко, так как имеет серьезные недостатки: его характеристика II линейна в очень узкой области и сильно отличается от расчетной характеристики I, фаза выходного сигнала не реагирует на смену знака входной величины.

Рис. 67. Схемы индуктивных и трансформаторных датчиков: а — простейший плоскостной; б — характеристика плоскостного датчика; в — дифференциальный плоскостной; г — дифференциальный плунжерный; д — трансформаторный датчик угла поворота; е — характеристики плунжерных и трансформаторных датчиков; 1— подвижный якорь; 2 — неподвижный магнитопровод; 3 — пружина; 4 — подвижный плунжер.
Кроме того, при достаточно большом выходном сигнале на ярмо датчика действует значительная сила притяжения. Отличие реальной характеристики от расчетной при малых воздушных зазорах объясняется главным образом наличием тока холостого хода, а при больших — сказывается влияние активного сопротивления обмотки.
В дифференциальном индуктивном датчике, получившем практическое применение, входной величиной является смещение плунжера (якоря) относительного среднего положения, а выходной — геометрическая разность токов І1 - І2 (рис. 67, в и г). Когда плунжер находится в нейтральном положении, эти токи равны друг другу І1=І2 следовательно, ток во вторичном приборе отсутствует.
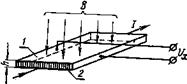
Рис. 68. Датчик э. д.с. Холла.1— полупроводниковая пластина .2—металлизированные грани для подвод.
При смещении плунжера изменяются индуктивные сопротивления обмоток датчика, поэтому нарушается равенство токов I1 и І2 и появляется выходной сигнал (рис. 67, е). Фаза выходного сигнала зависит от направления отклонения плунжера.
У трансформаторного датчикаугла поворота( рис .67, д) при  э.д.с. в обмотке среднего сердечника не наводится, поскольку магнитные потоки, создаваемые намотанными в противоположном направлении обмотками крайних сердечников, равны и направлены встречно. Когда же якорь смещается, магнитное сопротивление для потока одной обмотки увеличивается, а для потока второй уменьшается, вследствие чего на выходе датчика появляются напряжение и ток.
э.д.с. в обмотке среднего сердечника не наводится, поскольку магнитные потоки, создаваемые намотанными в противоположном направлении обмотками крайних сердечников, равны и направлены встречно. Когда же якорь смещается, магнитное сопротивление для потока одной обмотки увеличивается, а для потока второй уменьшается, вследствие чего на выходе датчика появляются напряжение и ток.
На рисунке 67, е показана характеристика плунжерных и трансформаторных датчиков.
Простота и прочность конструкции, отсутствие скользящих контактов обеспечивают высокую надежность индуктивных и трансформаторных датчиков. Они имеют более высокий передаточный коэффициент и к. п. д., чем потенциометрические. К их общим недостаткам следует отнести трудности настройки, отклонение реальной характеристики от расчетной и возможность работы лишь на переменном токе.
Датчик э. д. с. Холла представляет собой полупроводниковую пластину с четырьмя выводами, помещенную в магнитное поле (рис. 68). К двум выводам пластины подводится ток I. При изменении магнитного поля носители электричества отклоняются от первоначального направления движения тока и создают на двух других выводах разность потенциалов Ux. Таким образом, входной величиной является здесь изменение магнитного поля с индукцией В в результате механических воздействий (перемещение постоянного магнита, введение экрана и т. д.), а выходной — изменение напряжения Ux.
Напряжение на выходе (В), или так называемая э. д. с. Холла,
 (46)
(46)
где к — коэффициент Холла, изменяющийся для различных полупроводниковых материалов в пределах от 10-2 до 9·10-9 м3/А·с;
h — толщина пластины, м;
В — магнитная индукция, Тл;
I —ток через пластину, А.
К достоинствам датчиков Холла следует отнести широкий диапазон входных и выходных сопротивлений, малые размеры, высокую виброустойчивость и практически неограниченный срок службы.
К магнитоуправляемым датчикам относят магнитоуправляемые контакты и магнитосопротивления.
Магнитоуправляемые контакты(герконы) помещены в герметический баллон с изолирующей жидкостью или инертным газом. Они срабатывают при приближении к баллону постоянного магнита или электромагнита переменного тока, закрепленного на перемещающейся детали. Большим их преимуществом является простота конструкции, герметичность и низкая стоимость.
Датчики магнитосопротивленияиспользуют в своей работе явление увеличения электрического сопротивления некоторых проводников и полупроводников в магнитном поле. При изменении магнитного поля под действием входной величины относительное изменение удельного сопротивления элемента достигает сотен и тысяч единиц и определяется квадратичным законом:
 (47)
(47)
где В — индукция магнитного поля;
А — коэффициент, зависящий от формы элемента магнитосопротивления;  — подвижность носителей тока, м2/В-с.
— подвижность носителей тока, м2/В-с.
Магнитоупругие датчики применяют для измерения механических усилий, малых деформаций и обнаружения начала пластических деформаций. Действие их основано на зависимости магнитных характеристик ферромагнитных (магнитострикционных) материалов от механического напряжения в материале. Изменение магнитных характеристик материала магнитопровода сказывается в изменении индуктивности или взаимной индуктивности обмоток датчика, жестко укрепленного на исследуемой детали (рис. 69, а). Под действием механических сил, не превосходящих предела упругости, у ферромагнитных материалов происходит изменение крутизны петли гистерезиса (рис. 69, б). Существенные недостатки магнитоупругих датчиков (необходимость индивидуальной калибровки и необратимые изменения магнитных свойств материала) ограничивают область их применения.


Рис. 69. Магнитоупругий датчик:
а — рабочий элемент датчика; б — характеристика ферромагнитного материала датчика; 1 — магнитопровод; 2 — исследуемая деталь; 3 — слой клея или припоя; а — растягивающее напряжение.
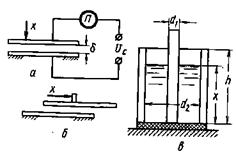
Рис 70. Ёмкостные датчики
а — с изменением зазора  ; б — с изменением площади обкладок; в — сизменением диэлектрической проницаемости межобкладочного пространства.
; б — с изменением площади обкладок; в — сизменением диэлектрической проницаемости межобкладочного пространства.
Емкостные датчикипреобразуют разнообразные входные воздействия (механические усилия, линейные или угловые перемещения в изменение своей электрической емкости. Обычный емкостный датчик представляет собой конденсатор, у которого под действием входных величин изменяется расстояние между обкладками б или площадь обкладок S. На рисунке 70 схематически представлены разновидности ёмкостных датчиков .
Ёмкость (Ф) плоскостного датчика (рис.70, а и б )
 (48)
(48)
где  = 8,85-КГ13 Ф/м — диэлектрическая проницаемость вакуума (воздуха)' 8 — относительная диэлектрическая проницаемость среды между пластинами.
= 8,85-КГ13 Ф/м — диэлектрическая проницаемость вакуума (воздуха)' 8 — относительная диэлектрическая проницаемость среды между пластинами.
Относительное изменение емкости

Зная изменения какого-либо параметра датчика, например 
 и
и  , возникшее в результате действия входной величины, не трудно определить чувствительность плоскостного датчика:
, возникшее в результате действия входной величины, не трудно определить чувствительность плоскостного датчика:
 (50)
(50)
Емкость (Ф) цилиндрического датчика (рис. 70, в)
 (51)
(51)
где  — диэлектрическая проницаемость среды, заполнившей нижнюю часть датчика.
— диэлектрическая проницаемость среды, заполнившей нижнюю часть датчика.
Чувствительность (Ф/м) цилиндрического датчика
 (52)
(52)
В емкостных датчиках применяют также специальные диэлектрические и полупроводниковые материалы, диэлектрическая проницаемость которых весьма велика (ε = 1000 ÷ 30 000) и резко зависит от ряда внешних воздействий: температуры, электрической напряженности постоянного и переменного поля, частоты и радиационных излучений, механического давления и т. д. Основываясь на этих зависимостях, разрабатывают датчики различных параметров [5].
Емкостные датчики практически безинерционны, и поэтому их применяют для измерения быстро меняющихся величин (колебания, вибрации, ускорения и т. п.). С целью увеличения чувствительности обращаются к дифференциальным и резонансным схемам включения емкостных датчиков. Поскольку мощность выходного сигнала этих датчиков мала, к ним присоединяют усилители. Необходимость уменьшения числа каскадов усиления и снижения емкостного сопротивления вынуждает подавать на емкостные датчики питание от источников повышенной частоты. Потребность в источниках повышенной частоты и большое влияние паразитных емкостей являются недостатками рассматриваемых датчиков.
Дата добавления: 2015-04-11; просмотров: 348; Мы поможем в написании вашей работы!; Нарушение авторских прав |