КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
промышленных роботов
Реализация предлагаемых алгоритмов на микропроцессорных системах прямого цифрового управления манипуляторами позволяет полностью автоматизировать процесс идентификации коэффициентов уравнений динамики.
1. Разработано программное обеспечение специализированного робототехнического комплекса для автоматизации операций, являющееся оболочкой операционной системы микропроцессорного контроллера. В состав программного обеспечения входит специализированный проблемно-ориентированный язык интерпретатор команд. обеспечивающий обучение, перепрограммирование, автоматическую работу, наладку и настройку исполнительных механизмов. В состав команд входят как исполнительные команды покоординатных движений всех механизмов, так и команды более высокого задачно- ориентированного уровня для выполнения отдельных технологических операций.
2. Предложен алгоритм и создан программный комплекс для группового управления специализированным робототехническим комплексом для автоматизации операций, обеспечивавший последовательно децентрализованную дисциплину программных модулей выполнения покоординатных цикловых манипуляторов, транспортера и вспомогательного комплекса. В результате применения группового подхода /управления, время выполнения технологического цикла сокращается. И по сравнению со временем при классическом управлении комплексом в общей циклограмме.
Для манипулятора с самотормозящимися приводами при движениях "от точки к точке" разработан адаптивный алгоритм, реализующий оптимальное по "быстродействию" управление, включающее поиск в режиме самообучения значений.
Обобщения координат точек переключения управления в фазовом пространстве и минимальных управляющих сигналов, реализирующих "ползучие" скорости для точного позиционирования при наличии люфтов в передачах.
Исследуются уравнения динамики для манипулятора с ротационными кинематическими парами и электроприводами постоянного тока. Разработан и исследован алгоритм для идентификации коэффициентов перед ускорениями, коэффициентов вязкого и сухого трения и гравитационных членов в уравнениях динамики.
WORKVISUAL

Эффективная работа в течение всего жизненного цикла программного обеспечения в системах автоматизации.
Программирование. Конфигурирование. Загрузка. Тестирование. Диагностика. Изменение. Архивирование. WorkVisual охватывает все шаги проекта в единой гомогенной среде автономной разработки, интерактивной диагностики и технического обслуживания. С максимальной степенью согласованности и универсальности на основе каталогов и проектных данных, охватывающих все программы. Таким образом, каждый этап органично подходит к любому другому без возникновения каких-либо противоречий. Включая частные задачи, вплоть до исполнимого решения. 

ОБЗОР ОСНОВНЫХ ХАРАКТЕРИСТИК
1. Гомогенная, ориентированная на проект среда проектирования для всего жизненного цикла программного обеспечения
2. Унифицированный пользовательский интерфейс, соответствующий стандартам
3. Предоставление компактного и согласованного архива проектных данных, преимущество которого – предотвращение ошибочного многократного ввода данных
4. Администрирование сетей всех систем управления KR C4: мониторинг состояния, загрузка/отправка данных, архивирование и т. д.
5. Универсальная концепция диагностики
6. Интегрированная, унифицированная магистральная шина – конфигурирование ввода/вывода, выполнение соединения и диагностика на/между Robot Control и SoftSPS
7. Поддерживаемые магистральные шины PROFINET, PROFIBUS, INTERBUS, EtherCAT, в будущем также Ethernet/IP и DeviceNet
8. Интегрированная конфигурация функции Drag & Drop и настройка параметров с помощью меню для RoboTeam SafeRobot3.0 и дополнительных модулей, таких как линейные оси и позиционеры.
Приложение UGOPEN
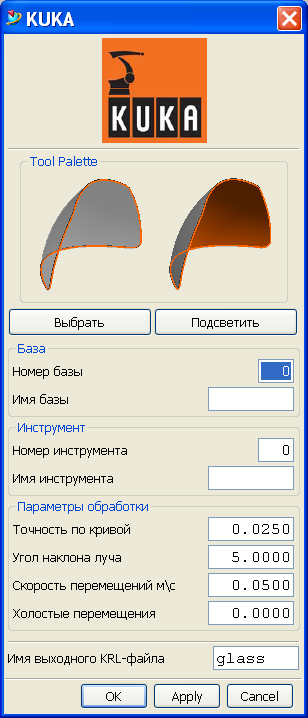
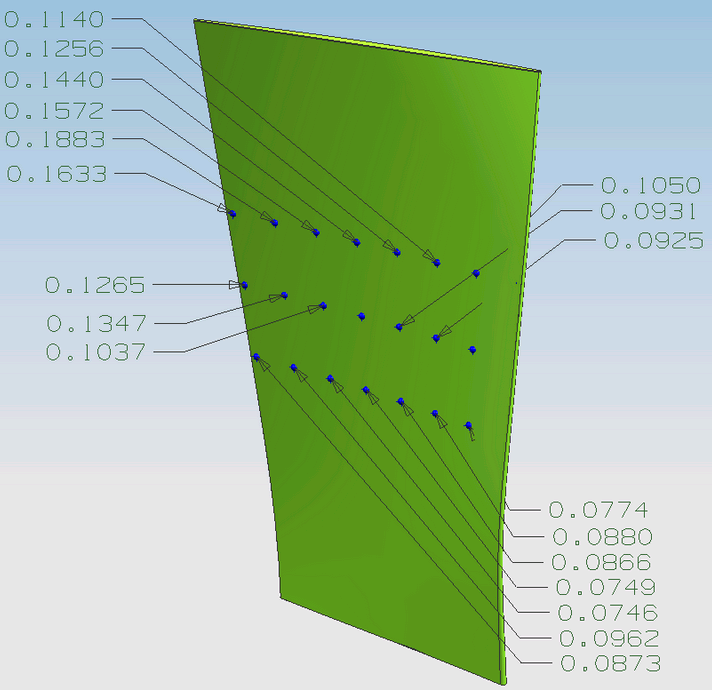
Для получения траектории движения робота было создано приложение UGOPEN, формирующее положение "инструмента" на обрабатываемой поверхности в соответствии с определенными требованиями. Для решения описываемой задачи необходимо должным образом ориентировать инструмент по отношению к траектории и к обрабатываемой поверхности, для чего совершенно недостаточно просто описать положение вектора инструмента. Самая близкая аналогия, которая приходит на ум - полет самолета по определенному маршруту, когда в каждой точке определены положение самолета, углы крена, тангажа и рыскания.
Для вычисления углов Эйлера для этого робота и для облегчения жизни всех столкнувшихся с аналогичной задачей размещена здесь небольшая форма для вычисления углов Эйлера по компонентам векторов повернутой системы координат X1Y1Z1.
| Вычисление углов Эйлера и кватерниона Euler Angles and quaternion Calculations X1 Y1 Z1 Примечание: приведенные в качестве примера данные соответствуют A = -60.0, B = -35.0 и С = 47.0 Если вы оставите это поле в "нетронутом" виде - углы Эйлера будут отправлены "на деревню дедушке"! | 
|
Заключение
Таким образом, мы видим, как стремительно роботы развиваются в промышленной сфере. Передовые технологии всё больше освобождают человека от выполнения сложной и рутинной работы. Внедрение робототехники на заводах способно экономить энергоресурсы, снизить уровень загрязнения окружающей среды, уменьшить затраты на рабочую силу и увеличить эффективность производственного процесса. Использование роботизированных технологий предоставляет предприятиям уникальную возможность осуществить эволюционный скачок и оторваться от конкурентов. Ведь окупаемость затрат на роботов уже доказана на практике. Так что, позаботьтесь о своем будущем и о будущем своей страны уже сейчас.
Литература
1. http://lolx.ru/23250-avtomatizirovannyy-zavod-promyshlennye-roboty-na-proizvodstve.html
2. http://www.znaytovar.ru/gost/2/ONTP_0386_Obshhesoyuznye_normy.html
3. http://dfpd.siemens.ru/market-specific-solutions/automotive/an-integrated-approach-for-the-automotive-manufacturing-process/paint-shop/
4. http://www.waromexport.ru/
5. Капустин, Н. М. Автоматизация производственных процессов в машиностроении: Учеб. для втузов / Под ред. Н. М. Капустина. — М.: Высшая школа, 2004. — 415 с. — ISBN 5-06-004583-8..
6. Данилевский, В. В. Русская техника. — Л.: Ленинградское газетно-журнальное и книжное издательство, 1947. — 545 с.
7. Вергинский, В. С. Очерки истории науки и технологии XVI—XIX в. (до 70-х гг. XIX в.). — М.: Просвещение, 1984. — 287 с.
8. Шухардин, С. В. Техника в её историческом развитии (70-е годы XIX — начало XX в.) / Отв. ред. С. В. Шухардин. — М.: Наука, 1982. — 511 с.
Дата добавления: 2015-04-16; просмотров: 94; Мы поможем в написании вашей работы!; Нарушение авторских прав |