КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Тенденции развития систем управления сцеплениями
На большегрузных грузовых автомобилях и автопоездах сцепление передает значительный крутящий момент, поэтому на них применяют системы управления сцеплением с пневматическими или гидропневматическими усилителями. Эти системы относятся к классу автоматизированных. На их базе создаются системы полуавтоматического управления, где автоматизируется лишь процесс переключения передач [4].
Наиболее простой вариант полуавтоматического управления сцеплением – пневмомеханический привод 6 (рисунок 9.1) с пневмоусилителем 7 и дополнительным трехлинейным двухпозиционным электромагнитным клапаном 5, подключенным к атмосферному выходу распределительного клапана 4.
Команды на выключение и включение сцепления подает электронный блок (на схеме не показан). Так, чтобы выключить сцепление, блок подает электропитание на обмотку клапана 5, в результате чего открывается доступ воздуха из ресивера к распределительному клапану 4, а от него – в рабочую полость исполнительного цилиндра. Сцепление выключается. Чтобы включить сцепление, блок обесточивает обмотку клапана 5, благодаря чему рабочая полость исполнительного цилиндра по линии «клапан 4 – клапан 5» соединяется с атмосферой.
В системе сохранена возможность непосредственного управления сцеплением педалью 1. В этом случае темп его выключения и включения задает водитель. Кроме того, в схеме предусмотрена «скользящая» вилка 3, обеспечивающая независимую работу привода как при трогании автомобиля (автопоезда) с места, так и в процессе переключения передач.

Рисунок 9.1 – Схема полуавтоматического пневмомеханического привода сцепления:
1 – педаль управления сцеплением; 2 – система рычагов и тяг; 3 – «скользящая» вилка; 4 – распределительный клапан; 5 – двухпозиционный электромагнитный клапан; 6 – пневмомеханический привод; 7 – пневмоусилитель; 8 – исполнительный цилиндр сцепления
Гидропневматический привод (рисунок 9.2) по конструкции более сложный. В таком приводе для переключения передач должно изменяться давление в управляющей гидравлической магистрали 6, поэтому шток подпедального цилиндра 1 педали управления сцеплением 2 выполнен скользящим.
В другой схеме (рисунок 9.3) в управляющую магистраль пневмоусилителя 5 устанавливается гидропневмоцилиндр 1 релейного действия, который управляется электромагнитным клапаном 3. В этом случае не требуется доработка подпедального цилиндра 6, упрощается механизм передачи усилия от педали управления к пневмоусилителю и повышается КПД привода.
Приведенные схемы полуавтоматического управления сцеплением достаточно просты и позволяют с минимальными затратами дооборудовать обычный (неавтоматический) привод сцепления. С точки зрения функциональных возможностей они одинаковы. Однако пневмомеханический привод (см. рисунок 9.1) проще: во-первых, в нем нет сопряжений гидравлических и пневматических магистралей, что упрощает схему; во-вторых, в режиме переключения передач непосредственная подача давления в рабочую полость исполнительного цилиндра исключает работу распределительного клапана 4, что упрощает предварительную настройку системы и снижает влияние работы клапана на переходный процесс переключения передач (педаль управления сцеплением в такой системе используется только при трогании автомобиля с места).
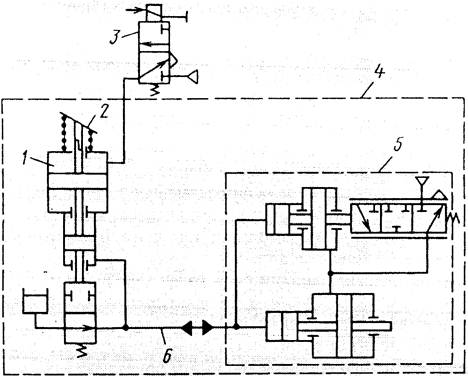
Рисунок 9.2 – Схема полуавтоматического гидропневматического привода сцепления:
1 – подпедальный цилиндр; 2 – педаль управления; 3 – двухпозиционный электромагнитный клапан; 4 – гидропневматический привод; 5 – пневмоусилитель; 6 – управляющая гидравлическая магистраль
Полуавтоматические системы с гидропневматическим приводом целесообразны для сочлененных транспортных средств, у которых двигатель расположен в задней части второго звена. В этом случае привод сцепления упрощается и повышается его КПД, снижается инерционность работы привода, связанная с деформацией тяг значительной длины и трением на осях вращения рычагов, а также трудоемкость его технического обслуживания, связанная с необходимостью периодического регулирования. Однако эти системы не лишены недостатков, связанных с большим числом подвижных механических элементов, трущихся пар и пружин гидропневмоаппаратов, а также значительными дроссельными потерями.

| 
|
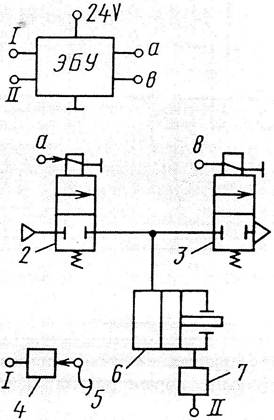
| Рисунок 9.3 – Схема полуавтоматического гидропневматического привода сцепления: 1 – гидропневматический привод; 2 – педаль управления; 3 – гидропневмоусилитель релейного действия; 4 – электромагнитный клапан; 5 – пневмоусилитель; 6 – цилиндр подпедальный | Рисунок 9.4 – Схема электропневматического привода сцепления: 2 – клапан впуска; 3 – клапан выпуска; 4 – подпедальный датчик; 5 – педаль управления; 6 – исполнительный цилиндр; 7 – датчик обратной связи; I и II (а и в) – входные (выходные) сигналы электронного блока управления |
В связи с этим, в последнее время находят все большее распространение системы управления сцеплением, базирующиеся на электроприводе. В таких системах сведено к минимуму число входящих в них гидропневмоаппаратов и существенно упрощена схема дистанционного управления сцеплением, что позволяет достичь малой инерционности систем управления.
Функции управления в такой схеме (см. рисунок 9.4) переданы электронному блоку управления, который по сигналам датчиков I и II вырабатываетнаиболее рациональный закон управления сцеплением (выходные сигналы а и в). За пневмоаппаратурой остаются лишь силовые функции: клапаны 2 впуска и клапаны 3 выпуска подают или выпускают воздух из рабочей полости исполнительного цилиндра 6. При наличии электропневматического привода управления сцеплением водитель, воздействуя на педаль подачи топлива, задает скоростной режим движения автопоезда, а все функции по управлению сцеплением, выбору и переключению передач выполняет автоматика. Управление автопоездом становится двухпедальным. Одновременно повышается и долговечность самого сцепления, потому что оно всегда включается по наиболее рациональному закону управления.
Дальнейшим развитием систем управления сцеплением являются микропроцессорные системы автоматического управления сцеплением, которые позволяют полностью отказаться от педали управления. Как правило, они представляют собой составные части более общих систем – управления трансмиссией или силовой установкой автомобиля.
Система автоматического управления сцеплением состоит из измерительно-информационного блока, блока преобразования информации, электронного блока управления (ЭБУ), усилительного устройства, исполнительного механизма сцепления, устройства отображения информации и блока питания. Блок преобразования информации и усилительное устройство образуют устройство сопряжения.
Измерительно-информационный блок предназначен для выдачи информации о скорости движения автомобиля, положении педали подачи топлива, состоянии исполнительного механизма сцепления (датчик положения штока исполнительного цилиндра сцепления – датчик обратной связи), коробки передач (концевые выключатели передач), двигателя (датчик частоты вращения коленчатого вала). Работу автомобиля в целом этот блок отражает по датчику угловой скорости вторичного вала коробки передач.
Полученная от датчиков информация (сигналы) проходит блок преобразования информации, который обрабатывает сигналы и приводит их к удобному для работы ЭБУ виду. Задача ЭБУ – формирование требуемого закона изменения момента трения сцепления, а также контроль величины рассогласования рассчитанного параметра регулирования и параметра, фиксируемого датчиком обратной связи.
Далее ЭБУ выдает сигналы в усилительное устройство, откуда они идут в исполнительные механизмы (приводы) управления двигателем, коробкой передач и сцеплением. При этом гидравлические или пневматические исполнительные механизмы сцепления и коробки передач в процессе трогания автомобиля с места, движения с низкой скоростью при буксующем сцеплении, а также при переключении передач работают синхронно.
Функции по индикации режимов работы ЭБУ и состоянию системы автоматического управления сцеплением возложены на устройство отображения информации.
Блок питания имеет устройство стабилизации выходного напряжения, что необходимо для устойчивой работы всей системы при эксплуатации автомобиля.
Типичная для систем электрогидравлического автоматического и дистанционного управления сцеплением схема (рисунок 9.5), разработанная фирмой «Isuzu Motors», включает исполнительный механизм, который управляется быстродействующими электромагнитными клапанами впуска (1 и 2) и выпуска (3 и 4). Различия сводятся к типу, числу и размерам условных проходных сечений электромагнитных клапанов, которые могут быть двухлинейными двухпозиционными, двухлинейными трехпозиционными и трехлинейными трехпозиционными.
Варианты управления сцеплением следующие:

|
| Рисунок 9.5 – Схема системы электрогидравлического автоматического управления сцеплением: 1, 2, 3 и 4 – электромагнитные клапаны; 5 – исполнительный гидроцилиндр |
- клапаны 3 и 4 закрыты, клапан 2 открыт, жидкость под давлением подается в рабочую полость исполнительного цилиндра 5, выключая сцепление;
- клапаны 2, 3 и 4 закрыты, цилиндр 5 удерживает буксующее сцепление в заданном промежуточном положении;
- клапан 2 закрыт, клапаны 3 и 4 открыты – сцепление включено.
Темп включения сцепления задается за счет импульсного способа подачи электропитания на обмотки клапанов 3 и 4, которые, открываясь и закрываясь с большой частотой, обеспечивают плавное включение сцепления, не допуская значительных колебаний давления в рабочей полости исполнительного цилиндра 5.
Как работает система автоматического управления сцеплением можно рассмотреть на примере самого сложного из режимов – трогания автомобиля с места.
В этом режиме водитель, воздействуя на педаль подачи топлива, увеличивает частоту вращения коленчатого вала двигателя. Получив данный сигнал, блок управления дает команду на повышение длительности импульсов, проходящих через обмотки электромагнитных клапанов 3 и 4. В результате возрастает общая продолжительность открытого их состояния, и момент, передаваемый сцеплением, плавно нарастает, а автомобиль столь же плавно разгоняется. В момент, когда клапаны закрываются, сцепление полностью включается.
Реализацию закона управления сцеплением обеспечивают три программы:
- первая – программа информационных параметров, необходимых для режимов переключения передач, плавного трогания с места и выдержки момента сцепления на заданном уровне при парковке автомобиля;
- вторая – программа параметров импульсного регулирования электроклапанов, работающая на основе анализа информации, полученной с датчика обратной связи положения штока исполнительного цилиндра 5;
- третья – программа, активизирующая клапаны 1, 2, 3 и 4.
Список литературы
1. Вахламов В.К. Автомобили: Конструкция и элементы расчета: учебник для студ. вузов. – М.: Изд. центр «Академия», 2008. – 480 с.
2. Вишняков Н.Н., Вахламов В.К., Нарбут А.Н. и др. Автомобиль. – М.: Машиностроение, 1976. – 296 с.
3. Двухмассовый маховик: Технологические решения. Диагностика неисправностей. Руководство компании «LuK», 2007. – 27 с.
4. Захарик Ю.М., Руктешель О.С., Ракомсин А.П. и др. Системы управления сцеплением. Тенденции развития // Автомобильная промышленность, 2003, № 1. С.13-15.
5. Иванов А.М., Солнцев А.Н., Гаевский В.В. и др. Основы конструкции автомобиля. – М.: ООО «Книжное издательство «За рулем», 2005. – 336 с.
6. Лукин П.П., Гаспарянц Г.А., Родионов В.Ф. Конструирование и расчет автомобиля. – М.: Машиностроение, 1984. – 376 с.
7. Проектирование полноприводных колесных машин: Учебник для вузов: В 3 т. Т.2 / Б.А. Афанасьев, Л.Ф. Жеглов, В.Н. Зузов и др.; Под ред. А.А. Полунгяна. – М.: Изд-во МГТУ им. Н.Э.Баумана, – 2008. – 528 с.
8. Шарипов В.М. Конструирование и расчет тракторов: Учебник для студентов вузов. – М.: Машиностроение, 2009. – 752 с.
Дата добавления: 2015-04-16; просмотров: 117; Мы поможем в написании вашей работы!; Нарушение авторских прав |