КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Асинхронный двигатель. Асинхронный двигатель (АД)
Асинхронный двигатель (АД). Принцип действия его основан на взаимодействии вращающегося магнитного поля статора и индуцированного тока ротора.
АД выпускается в двух вариантах исполнения ротора: короткозамкнутый и фазный.
Рассмотрим устройство и принцип действия двигателя с короткозамкнутым ротором.
Обе части асинхронного двигателя собираются из листов электротехнической стали толщиной 0,5 мм. Эти листы для уменьшения потерь на вихревые токи изолированы друг от друга слоем лака.
В пазах с внутренней стороны статора уложена трехфазная обмотка, токи которой возбуждают вращающееся магнитное поле машины. В пазах ротора размещена вторая обмотка, токи в которой индуктируются вращающимся магнитным полем.
Магнитопровод статора заключен в массивный корпус, являющийся внешней частью машины, а магнитопровод ротора укреплен на валу.

|

A) б)
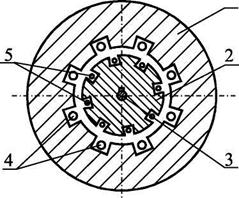
1 - статор; 2 - ротор; 3 - вал; 4 - витки обмотки статора;
5 - витки обмотки ротора
Рис.52 Схема устройства асинхронного двигателя: поперечный разрез (а);
обмотка ротора(б)
Обмотка короткозамкнутого ротора представляет собой цилиндрическую клетку («беличье колесо») из медных шин или алюминиевых стержней, замкнутых накоротко на торцах двумя кольцами (рис.52,б). Стержни этой обмотки вставляются без изоляции в пазы магнитопровода.
Применяется также способ заливки пазов магнитопровода ротора расплавленным алюминием с одновременной отливкой и замыкающих колец.
Рассмотрим процесс. Пусть магнитное поле вращается «по часовой стрелке», тогда в стержнях цилиндра ротора будет наводится ЭДС
 ,
,
Где В – индукция в зазоре, L – длина стержня, υ– линейная скорость стержня, равная (ωвр.стат – ωрот)D/2.
Эта ЭДС вызовет в стержне ток
 ,
,
Где Rс – активное сопротивление стержня; хс - реактивное сопротивление стержня.
Этот ток, взаимодействуя с полем статора, по закону Ампера образует силу,
действующую на стержень
 .
.
Сила образует на валу ротора момент стержня Мс = Fc D/2. Сумма всех
моментов стержней образует суммарный момент на валу.
Мвр = Σ Мс
Однако, чем ближе скорость ротора np к скорости вращающегося магнитного поля nс, тем меньше ЭДС, индуктируемые полем в роторе, а, следовательно, токи в роторе и момент. Если скорости вращения сравняются, то момент исчезнет, поэтому основным условием работы является отставание частоты вращения ротора от частоты вращения поля статора (асинхронный)
Убывание токов уменьшает вращающий момент Мвр , воздействующий на ротор, поэтому ротор двигателя должен вращаться медленнее вращающегося магнитного поля - асинхронно.
При увеличении механической нагрузки асинхронного двигателя тормозящий момент на валу становится больше вращающегося и скольжение S возрастает.
Увеличение скольжения вызывает возрастание ЭДС и токов в обмотке ротора, благодаря чему увеличивается вращающий момент Мвр и восстанавливается динамическое равновесие вращающего Мвр и тормозящего Мт моментов:
Мвр=Мт.
Таким образом, увеличение нагрузки асинхронного двигателя вызывает увеличение его скольжения.
У современных асинхронных двигателей скольжение даже при полной нагрузке невелико - около 0,04 (четыре процента) у малых и около 0,015-0,02 (полтора-два процента) у крупных двигателей.
Характерная кривая зависимости М от скольжения S показана на рис.53,а.
Максимум вращающегося момента разделяет кривую М = f(S) на устойчивую часть от 0 до Sk и неустойчивую часть от Sk до S = 1.
На участке от 0 до Sk при уменьшении тормозящего момента Мт на валу асинхронного двигателя увеличивается скорость вращения, скольжение уменьшается и уменьшается электромагнитный момент, так что на этом участке работа асинхронного двигателя устойчива.
На участке от Sk до S = 1 с уменьшением Мт скорость вращения уменьшается, скольжение увеличивается и вращающий момент увеличивается, нарушается условие равенства моментов и двигатель останавливается.
Для практики большое значение имеет зависимость скорости двигателя np от нагрузки на валу np = F(M). Эта зависимость, как мы установили ранее, носит название механической характеристики (рис.53,б).

A) б)
Рис. 53 - Зависимость вращающего момента на валу асинхронного двигателя от скольжения (а) и механическая характеристика (б)
Если при изменении момента скорость вращения мало изменяется, то такая хорактеристика считается жесткой. Такую характеристику желательно иметь для главного привода металлорежущего станка. При перегрузке свыше максимального момента Мmax двигатель входит в область неустойчивого режима и останавливается. Отношение Мmax/Mном носит название перегрузочной способности, и у двигателей нормальной серии находится в пределах (1,8-2,6) Мном.
Асинхронные двигатели получили широкое распространение благодаря следующим достоинствам: простоте устройства; высокой надежности в эксплуатации; низкой стоимости.
С помощью асинхронных двигателей приводятся в движение подъемные краны, лебедки, лифты, эскалаторы, насосы, вентиляторы. Особенно много асинхронных двигателей на станках, там они выполняют различные функции: зажима планшайбы, перемещение люнета, зажим резца и многое др.
 КПД АД. Работу АД можно пояснит следующей энергетической диаграммой (рис. 54).
КПД АД. Работу АД можно пояснит следующей энергетической диаграммой (рис. 54).
Рис.54
Таким образом, двигатель получает из сети Рст. На статоре теряется энергия на нагрев проводов (Рпр. ст.) и в стали, за счет вихревых токов и перемагничивания (Рст). На ротор переходит так называемая электромагнитная мощность (Рэл). На роторе она теряется на нагрев проводов (Рпр) и другие потери: на трение, на вентиляцию, зубцовые и пр. (Рдоп). Отношение (Рв/Рст) = η и есть КПД. Для двигателей свыше одного кВт он находится в пределах (75-95)%.
Пуск асинхронного двигателя. Заметим, что асинхронный двигатель в момент запуска представляет собой трансформатор с большим воздушным зазором (2-3 мм). Поэтому ток статора зависит и определяется током ротора. Уменьшение тока ротора автоматически ведет к уменьшению тока статора. Так как в номинальном режиме частота тока в роторе мала, то отсутствует реактивное сопротивление ротора, и ток ротора определяется только активным сопротивлением. В режиме же пуска, пока ротор не развернулся, частота тока 50 Гц и ток определяется активной и реактивной составляющими сопротивления (реактивное по величине больше).
Поэтому пусковой ток только в 5-7раз превышает номинальный и АС двигатели чаще всего запускаются напрямую из сети, не используя специальные пусковые устройства.
Реверс асинхронного двигателя осуществляется изменением направления вращения поля статора. В свою очередь, для изменения вращения поля, нужно изменить чередование фаз. Это достигается перекрещиванием двух фаз как показано на рис. 55,б. На рис. 55,а показано обозначение асинхронного трехфазного короткозамкнутого двигателя.

А б
Рис.55 Рис.56
Торможение АД. Часто бывает необходимо быстро остановить двигатель или затормозить. АД допускают три вида торможения. Все механические характеристики в этом случае расположены во втором квадранте, так как момент торможения отрицательный.
Динамическое торможение осуществляется отключением цепи статора от переменного тока и включением двух фаз на постоянный ток. Стационарное поле образует отрицательный момент, и двигатель останавливается согласно характеристике 3, рис. 56.
Торможение противовключением осуществляется реверсом поля, то есть на полном ходу осуществляют перекрещивание фаз и двигатель резко затормаживает, характеристика 2, рис.56. Однако, если его не отключить при достижении им нулевой скорости, то он обязательно развернется в обратную. Кроме того, при реверсе поля ЭДС имеет обратный знак, и согласно уравнению (*) ток превысит даже пусковой в несколько раз. Поэтому при таком торможении ограничивают ток включением сопротивления в фазы статора.
Рекуперативное (генераторное) торможение возникает самопроизвольно, если ротор начинает вращаться со скоростью, которая превышает синхронную скорость вращения поля статора ( характеристика 1, рис.56). Такое положение возникает при спуске груза на подъемном кране или на электровозе при спуске с горки. Режим экономичный, так как двигатель переходит в режим генератора и отдает энергию в сеть.
Регулирование частоты вращения вала. Одно из основных требований, предъявляемых к электрическому двигателю привода какого либо механизма, – это изменение частоты вращения вала. Изменять скорость вращения можно механически с помощью коробки передач. Однако, если такие возможности есть у электрического двигателя, то отпадает коробка передач, что значительным образом упрощает конструкцию агрегата.
Если исходить из того, что частота вращения вала определяется
 , то следует три способа.
, то следует три способа.
Регулирование частоты вращения числом пар полюсов. Промышленность специально выпускает двигатели с двумя, тремя и четырьмя парами полюсов. Что дает возможность ступенчато получить фиксированные соответственно две, или три, или четыре скорости. Семейство механических характеристик на рис.57,а.
|  | |||

 ω ω ω
ω ω ω
M М М
A б в г
Рис. 57
Существует понятие «диапазон регулирования» отношение максимальной скорости к возможной минимальной, записывается 5:1, 8:1 и т.д., так предыдущий тип регулирования дает диапазон: 2:1, 3:1, 4:1.
Регулирование скольжением. Это возможно для двигателей с фазным ротором. У него ротор состоит из секций соединенных в звезду, концы обмотки крепятся к трем контактным кольцам, которые через щетки могут соединяться с внешней цепью. Эти щетки либо закорочены, тогда это обычный короткозамкнутый двигатель, либо к ним что-нибудь присоединяется (рис. 57,б). Если присоединить сопротивления и величину их регулировать, то возникает семейство механических характеристик рис. 57,в. Характеристики получаются мягкие и для станков негодные,а для подъемно транспортных машин вполне хорошие, поэтому такое регулирование скорости вращения применяется на кранах. Диапазон регулирования 4:1.
Регулирование частоты входного напряжения. Если менять частоту входного напряжения специальным устройством, то будет изменяться ω0 в формуле (2) и семейство механических характеристик представлено на рис. 57,г. Так, как с нарастанием частоты увеличивается реактивное сопротивление, то без специальных мер изменяющих величину входного напряжения диапазон регулирования 2:1. Если же регулирование будет комплексное, то есть частота и величина напряжения, то диапазон регулирования возрастает до 10:1.
Контрольные вопросы к теме
1. Каковы виды, конструкция, номинальные данные трансформаторов?
2. Каков принцип действия, как осуществляется саморегулирование трансформатора.
3. Режимы холостого хода и короткого замыкания, опыты холостого хода и короткого замыкания. Что в результате этих опытов получают?
4. Какие существуют потери энергии в трансформаторе, и каков его КПД?
5. Каков принцип действия и векторная диаграмма работы синхронного генератора.
6. Вращающееся магнитное поле, принцип действия синхронного двигателя, Механическая и угловая характеристики
7. Устройство и принцип действия асинхронного двигателя, саморегулирование.
8. Основные соотношения асинхронного двигателя, механическая характеристика, энергетическая диаграмма, пуск реверс, торможение, регулирование скорости.
Дата добавления: 2015-04-16; просмотров: 118; Мы поможем в написании вашей работы!; Нарушение авторских прав |