КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Электропривод ЭТА
К электроприводам ЭТА относится разработанная серия автономных (следящих) электроприводов подач под названием ЭТИ (электропривод тиристорный автономный). Основным свойством этого привода является возможность точной отработки заданного угла поворота вала двигателя. С этой целью двигатель снабжен как тахогенератором, так и датчиком положения. Последний построен на принципе фотоэффекта, обеспечивающего преобразование светового потока в электрический сигнал. Вот как устроен фотоимпульсный датчик положения вала двигателя (рис. 2.26.а). На валу двигателя жестко зафиксирован диск со щелями. Если на эти щели направить световой поток от светодиода, а с другой стороны диска поставить световой фотоэлемент, то при вращении диска фототок будет периодически прерываться. В результате формируется последовательный ряд импульсов тока, число которых пропорционально углу поворота диска, а частота импульсов в единицу времени определяет скорость его вращения.
Если создать задающее устройство, выдающее команду в виде «пакета», например,
Из 1000 импульсов, которые после соответствующих преобразований начнут вращаться , то, как

Рис. 2.26. Электропривод серии ЭТА:
а – устройство фотоимпульсного датчика; б – умножение числа импульсов на четыре;
в – интегратор; г – структурная схема
только двигатель приведет во вращение, фотоимпульсный датчик начинает «возвращать» импульсы в систему управления. При равенстве импульсов задания и импульсов обратной связи двигатель остановится. Так мы получили режим позиционирования – вал двигателя остановился в заданной позиции, он как бы «отработал» 1000 импульсов.
Рассмотрим вопрос о точности позиционирования. Нетрудно прийти к выводу, что чем больше число щелей в диске датчика, тем меньшим может быть залаваемый угол поворота вала двигателя, который он может отработать при данном датчике положения.
Чем меньше дискрета, тем выше точность. Покажем способ учетверения числа ипульсов при наличии 250 щелей на диске фотодатчика. Если вместо одного фотодиода установить два и расположить их так, чтобы два потока импульсов были сдвинуты друг относительно друга на 900 (рис. 2.26.б), можно заметить, что при пересечении щелью диска двух фотодиодов формируется импульсов, имеющих четыре фронта, - два перед . Эти фронты суммируются в один поток импульсов таким образом, что на одну щель уже приходится четыре импульса. В результате за один оборот двигателя тот же датчик выдаст не 100, а 1000 импульсов. Дискрета теперь уменьшилась в 4 раза и составляет 3600: 1000=0,360 или (=20/). Аналогичном способом можно получить еще более мелкую дискрету и достигнуть еще более высокой точности.
Попробуем разобраться, как работает привод с фотоимпульсным датчиком положения. Вспомним, что у привода скорость вращения двигателя зависит от задающего напряжения. Величина имеющего напряжения +-10 В, т.е. для получения номинальной частоты вращения двигателя nн требуется 10 В. Знаки +- соответствуют направлению вращения, т.е. плюс означает вращение, например, по часовой стрелке, минус – противоположное.
Если преобразовать импульсы задания и обратной связи в падающее напряжение, которое вначале растет, а при равенстве импульсов задания и датчика обратной связи становится равным нулю, то частота вращения двигателя будет менятся по тому же закону – двигатель разгонится и остановится в заданном положении. Остается понять принцип действия преобразователя импульс – напряжение. В самом простом виде этот преобразователь представляет собою ОУ (рис. 2.26.в), вход и выход которого соеденены через конденсатор C. При подаче на вход ОУ импульса усилитель отпирается его передним фронтом и запирается задним фронтом. В этих условиях конденсатор периодически заряжается и разряжается, накапливая и отдавая электрическую энергию. Благодаря этому на выходе ОУ формируется аналоговое напряжение, величина которого пропорциональна частоте следования импульсов. Можно сделать вывод, что добавление к приводу фотоимпульсов датчика приводит к появлению нового свойства привода – осуществлять позиционирование.
Этим не исчерпываются новые свойства привода. Оказывается, при условии непрерывной подачи импульсов он может работать в следящем режиме. Мы видим, что в названии режима есть слово «слежение». Наиболее понятен это режим при рассмотрении станков с ЦПУ при контурной обработке. С этом случае привод подачи «следит» за программой, которая выдается устройством ЧПУ. Очевидно, при слежении всегда есть некоторое отстаивание как по скорости, так и по пути фактического движения от заданного (по программе) движения. Чем отставание меньше, тем качественное (добротное) следящий электропривод. В связи с этим для количественной оценки качества следящего электропривода введено понятие добротности. Коэффицинет добротности обозначим буквой σ.Для его определения пригодна упрощенная формула, с-1, =6n/ , где n – частота вращения, об/мин; - угол отставания, 0, 6 – число имеющее мин0/об/с.
Например, при частоте вращения двигателя 500 об/мин и угол отставания =900 =6500/90 32 с-1. в станках с ЧПУ находится в пределах 20-40 с-1. с целью улучшения применяют компенсацию скоростной ошибки (КСО). Смысл ее состоит в математическом добавлении к основному напряжению задания напряжения КСО, которое пропорционально заданной скорости.
Электропривод серии ЭТА состоит из аналоговой части – электропривода серии ЭТ3И и цифровой части – преобразователя импульс – аналог в качестве задающего сигнала. Привод обеспечивает работу в качестве регулятора положения в режиме позиционирования и в следящем режиме. С этой целью комплект привода серии ЭТ3И дополнен двумя печаиными платами (интегратором ПИ), усилителем ПУ и фотоимпульсным датчиком (ФИД), расположенным на валу двигателя.
Структурная схема привода (рис. 2.26.г) содержит преобразователь П серии ЭТ3И, двигатель М, тахогенератор G, импульсный датчик пути и частоты вращения З, преобразователь сигналов обратной связи ПУ, канал компенсации скоростей ошибки КСО с переключателем, имеющим два положения: первый – в следящем режиме, второй – в режиме позиционирования.
Узлы п, М и G соответствуют традиционному аналоговому электроприводу с обратной связью по частоте вращения. В качестве цифровой задающей части автономного привода служит управляющее устройство З, на выходе котрого формируется командные импульсы. Этим устройством может быть устройство с ЧПУ или любая другая система с импульсным выходом в виде унитарного кода. В узле ПИ происходит вычитание импульсов обратной связи из командных импульсов (образование сдвига фаз, пропорционально этой разности) и превращение фазового сдвига в аналоговой сигнал, поступающий на вход узла З.
Канал компенсации скоростной ошибки (КСО) работает только в следящем режиме (положение перемычки 1). В режиме позиционирования (2) этот канал не работает. Ниже приведено описание работы отдельных блоков цифровой части привода серии ЭТА.
В зависимости от требуемого направления вращения двигателя импульсы задания в виде унитарного кода (импульсы идут последовательно с разной частотой) поступают на один из инверсных входов элементы D7 (рис. 2.27.а). С выхода 6 элемента D7 импульсы поступают на двухступенчатый триггер D8, где происходит формирование. На выходе 9 D8 образуется один узкий импульс, подаваемый на входы 9 D8 образуется один узкий импульс, подаваемый на входы D16 (1 и 4). На рис. 48,б показана тактограмма на входы D16 (1 и 4). На рис. 2.27.б показана тактограмма преобразований импульсов.
Фотоимпульсный датчик имеет два светодиода. Пресечение светового потока щелевым диском (N=250) создает два потока импульсов, сдвинутых один относительно другого на 900. Отставание

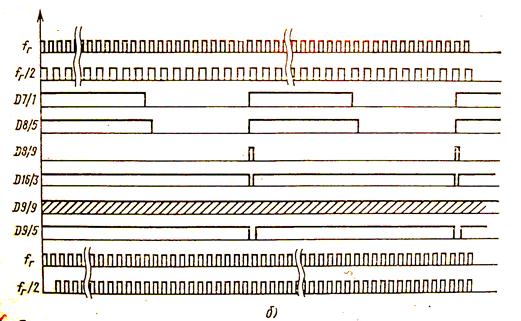
Схема (а) и тактограмма (б) работы узла преобразования импульсов задания
Или опережение импульсов одного канала относительно импульсов другого зависит от направления вращения двигателя.
Блок обработки импульсов и определения направления вращения. Формирование импульсов заключается в их учетверении, синхронизации частотой 1000 кГц и тактировании частотой 2000 кГц. Последовательность преобразования импульсов: после снижения уровня импульсов фотодатчиков (ФИД) в D20/2 и D20/5 (число в знаменателе – номер контакта элемента) и инвертирования (D21/3 и D21/6), учетверяются в D22, D23, D21/8, D21/11 (путем выделения передних и задних фронтов, импульсов датчика). Сформированные в триггерах D27, D28 импульсы через D29/11 поступают на входы D29/5 и входы D29/5 и D29/10.


Рис. 2.28. Схема (а) и тактограмма (б) работы узла преобразования импульсов обратной связи
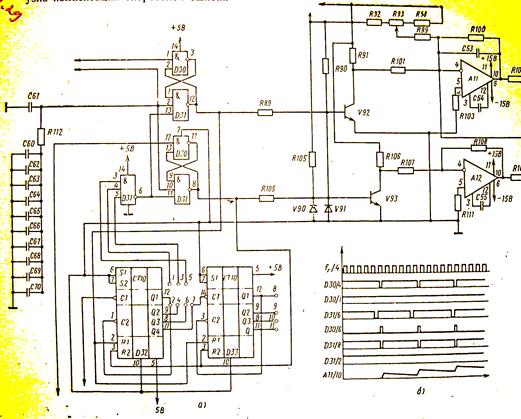
Рис.2.29. Схема и тактограмма (б) работы узла компенсации скоростной ошибки
Определение направления вращения осуществляется в зависимости от того, с какого канала датчика положения первым приходит импульс обратной связи. Например, при движении вперед (рис. 2.28.б, слева - направо) первым появляется импульс канала f1 и на выходе D26/6 появляется 1. при этом на D29/3 – 0. Если первым будет импульс f2, то на выходе 0, а на D28/3 – 1.
Узел КСО при работе в следящем режиме предназначен для преобразования сигнала задания в импульсной форме и аналоговый сигнал, пропорциональный скорости слежения. Этот сигнал подается на вход усилителя скоростного контура ЭТ3И для компенсации величины рассогласования между заданной частотой вращения и фактической ее величиной. С ростом частоты вращения эта ошибка возрастает и сигнал КСО также должен соответственно возрастать. Узел работает в обоих направлениях. Он состоит (рис. 2.29.а) из логических микросхем D30…D33 и узла интегрирования (V92, V93, А11 и А12).
С целью снижения пульсаций в выходном напряжении интегратора импульсы задания расширяются с помощью схемы совпадения D31 и счетчиков D32 D33, заполняемых импульсами частотой 500 кГц. Для этого между выходами D32, D33, D31/3, 4, 5 устанавливаются перемычки. Диаграмма преобразования импульсов приведена на рис. 2.29.б.
Работа привода «Вперед»: при включении привода на D31/11 и D31/8 по 1 (цепь R112, C61). Транзисторы V92, V93 открыты на выходе А11/10 нулевое напряжение. Сформированный в ПИ на D30/1 – 1, а на D30/12 – 0. V93 закрывается, C53 начинает заряжаться (рис. 2.29.б). Счетчики D32, D33 работают в режиме «Сложения до заданного кода», обусловленном положением перемычек на входах схемы совпадения D30/3, 4, 5. В момент совпадения на D31/6 – 0, на D31/8 – 1. V93 открывается и C53 начинает разряжаться. Выходное напряжение A11/10 показано на рис. 2.29.б.
В режиме «Назад» наоборот – V93 открыт, а V92 закрывается с частотой импульсов задания. Усилитель A12 служит для интегрирования выходного напряжения. В режиме позиционирования КСО отключается путем установки перемычки.
Отработка сигналов рассогласования производится следующим образом. На выходе двух каналов, состоящих из счетчиков (см. рис.2.27) D11…D13 и D17…D19, включен фазовый дискриминатор (D14, D7, D15), который измеряет фазовый сдвиг сигнала одного канала относительного другого (после соответствующего переполнения счетчиков). Минимальная величина сдвига 0,5 мкс, максимальная – 0,5 мс (исходя из частоты сдвига 2 мГц).
Возможны два случая работы дискриминатора: импульсы задания отсутствуют (или совпадают с импульсами обратной связи) и существуют. Рассмотрим случай, когда импульсы задания отсутствуют или совпадают с импульсами обратной связи (см. рис. 2.28). Сигналы тактирования частотой 2 мГц подаются на входы 14
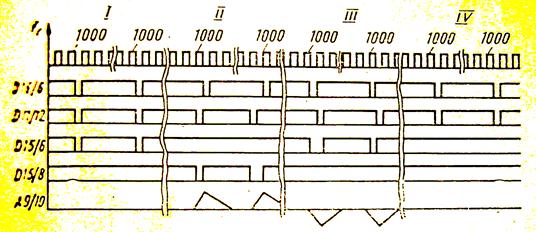
Рис. 2.50. Тактограмма работы дискриминатора
Счетчиков D11 и D17. через каждые 1000 импульсов на выходах 6 и 12 D14 возникает «нулевой» сигнал с частотой 1000 кГц. Они инвертируются в D7, D14 и подаются на триггеры D15. На выходах 6, 8 D15 имеется 1 , V87 и V89 открыты и на выходе A9 напряжение равно нулю (колонка I на рис. 2.50). Идентично, при попадании по времени импульсов задания с импульсами обратной связи на D15/6 и D15/8 также устанавливаются сигналы единичного уровня. V87 и V89 открыты и на выходе A9 напряжение равно нулю (колонка IV).
Если импульсы задания присутствуют (колонки II и III), то при наличии импульсов задания образуются фазовый сдвиг. Это происходит за счет вычитания импульсов задания и обратной связи из тактирующих импульсов, следующих с частотой 1 мГц. Если на D15/3 (см. рис. 2.27.а) «тысячные» импульсы поступают раньше, чем на D15/11, то на выходе 8 D15 появляется импульс нулевого уровня, на выходе 6 D15 – единичного. V87 закрывается и на выходе интегратора A9 появляется постоянное напряжение, величина которого пропорциональна фазовому сдвигу. Если «тысячные» импульсы раньше поступают на D15/11 – сигнал проходит уже по каналу V89, A10 и подает на A9. На вход ЭТ3И поступит задающее напряжение, знак которого противоположен рассмотренному выше случаю. Двигатель будет вращаться в противоположную сторну
Дата добавления: 2015-04-16; просмотров: 223; Мы поможем в написании вашей работы!; Нарушение авторских прав |