КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Теорема о моментах инерции относительно параллельных осей.
Момент инерции твёрдого тела относительно некоторой оси равен моменту инерции тела относительно параллельной оси, проходящей через его центр масс, сложенному с произведением массы тела на квадрат расстояния между осями. Допустим, что задана ось  . Для доказательства теоремы проведём 3 взаимно перпендикулярные оси, из которых ось
. Для доказательства теоремы проведём 3 взаимно перпендикулярные оси, из которых ось  параллельна заданной оси , а ось
параллельна заданной оси , а ось  лежит в плоскости параллельных осей и . Для вычисления моментов инерции тела относительно осей и опустим из каждой точки
лежит в плоскости параллельных осей и . Для вычисления моментов инерции тела относительно осей и опустим из каждой точки  рассматриваемого тела перпендикуляры
рассматриваемого тела перпендикуляры  и
и  на оси
на оси  и
и  . Выразим длины этих перпендикуляров через координаты этих точек:
. Выразим длины этих перпендикуляров через координаты этих точек:  ,
,  (зависимость а). Определим моменты инерции тела относительно осей и :
(зависимость а). Определим моменты инерции тела относительно осей и :  ,
,  . Применим зависимость а)
. Применим зависимость а)  (зависимость б),
(зависимость б),  из этой формулы получим
из этой формулы получим  т.к.
т.к.  =0 , то
=0 , то  . Подставляя это значение в равенство б), получаем зависимость, установленную теоремой:
. Подставляя это значение в равенство б), получаем зависимость, установленную теоремой: 
 18.1)Центробежные моменты инерции. Эллипсоид инерции. Главные оси и главные моменты инерции.
18.1)Центробежные моменты инерции. Эллипсоид инерции. Главные оси и главные моменты инерции.
2) Дифференциальные уравнения поступательного движения и вращения тела вокруг неподвижной оси.
1)Момент инерции твёрдого тела относительно оси v определяется по формуле

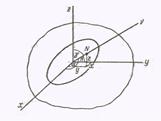
Рассмотрим изменение момента инерции  , происходящее при изменении направления оси v т.е при изменении углов α, β, γ. Для наглядного изображения этого изменения отложим по оси v от точки О отрезок ON, длина которого
, происходящее при изменении направления оси v т.е при изменении углов α, β, γ. Для наглядного изображения этого изменения отложим по оси v от точки О отрезок ON, длина которого  Выразим направляющие косинусы оси v через координаты x, y, z точки N и длину отрезка ON:
Выразим направляющие косинусы оси v через координаты x, y, z точки N и длину отрезка ON:  ;
;  ;
;  . Подставим cosα, cosβ, cosγ в выражение
. Подставим cosα, cosβ, cosγ в выражение  , подставили разделили на
, подставили разделили на  получили
получили  . Это уравнение определяет поверхность, по которой перемещается точка N, при изменении направления оси v при условии
. Это уравнение определяет поверхность, по которой перемещается точка N, при изменении направления оси v при условии  (ф-ла 123). Это уравнение представляет собой уравнение поверхности второго порядка. Эта поверхность является эллипсоидом, т.к. расстояния от всех точек N до точки О, определяемые формулой 123 всегда конечны. Этот эллипсоид называется эллипсоидом инерции. Центр эллипсоида находится в начале координат. Три оси эллипсоида называются главными осями инерции тела в точке О, а моменты инерции относительно этих осей- главными моментами инерции. Величины
(ф-ла 123). Это уравнение представляет собой уравнение поверхности второго порядка. Эта поверхность является эллипсоидом, т.к. расстояния от всех точек N до точки О, определяемые формулой 123 всегда конечны. Этот эллипсоид называется эллипсоидом инерции. Центр эллипсоида находится в начале координат. Три оси эллипсоида называются главными осями инерции тела в точке О, а моменты инерции относительно этих осей- главными моментами инерции. Величины 

 называются центробежными моментами инерции соответственно относительно осей y и z, z и x, x и y.
называются центробежными моментами инерции соответственно относительно осей y и z, z и x, x и y.
2)При поступательном движении тела все его точки движутся также как и и его центр масс. Поэтому дифференциальные уравнения движения центра масс тела являются дифференциальными уравнениями поступательного движения твёрдого тела:  с y и z такие же уравнения m- масса тела,
с y и z такие же уравнения m- масса тела,  - координаты центра масс тела
- координаты центра масс тела  - проекция внешней силы F на оси координат X,Y,Z – проекции главного вектора внешних сил R на эти оси. По дифференциальным уравнениям поступательного движения можно решать два основных типа задач на поступательное движение твёрдого тела: 1) по заданному движению твёрдого тела определить главный вектор, приложенных к нему сил 2) по заданным внешним силам, действующим на тело, и начальным условиям движения находить кинематические уравнения движения тела, если известно, что оно движется поступательно.
- проекция внешней силы F на оси координат X,Y,Z – проекции главного вектора внешних сил R на эти оси. По дифференциальным уравнениям поступательного движения можно решать два основных типа задач на поступательное движение твёрдого тела: 1) по заданному движению твёрдого тела определить главный вектор, приложенных к нему сил 2) по заданным внешним силам, действующим на тело, и начальным условиям движения находить кинематические уравнения движения тела, если известно, что оно движется поступательно.
Уравнение  представляет собой дифференциальное уравнение вращения твёрдого тела вокруг неподвижной оси. По дифференциальному уравнению можно решать следующие задачи: 1) по заданному уравнению вращения тела
представляет собой дифференциальное уравнение вращения твёрдого тела вокруг неподвижной оси. По дифференциальному уравнению можно решать следующие задачи: 1) по заданному уравнению вращения тела  и его моменту инерции
и его моменту инерции  определять главный момент внешних сил, действующих на тело :
определять главный момент внешних сил, действующих на тело :  2) по заданным внешним силам, приложенным к телу, по начальным условиям вращения
2) по заданным внешним силам, приложенным к телу, по начальным условиям вращения  и по моменту инерции
и по моменту инерции  находить уравнение вращения тела 3) определять момент инерции тела относительно оси вращения, зная величины
находить уравнение вращения тела 3) определять момент инерции тела относительно оси вращения, зная величины  и
и 
19.1) Дифференциальные уравнения движения механической системы. Т- ма о движении центра масс системы.
2)Движение тел в воздухе при наличии сопротивления, пропорционального квадрату скорости.
1)
эти уравнения называются уравнениями движения механ. сист. в вектр. ф – ме.
Теорема: Произведение массы механической системы на ускор. ее центра масс = гл. вектору всех действ на сист. внешних сил. Данная теорема позволяет глубже раскрыть значение матер. точки и изучения динамики ее движения.
2)
При движении тел в газах в частности в воздухе при скорости до 300 м\с сила сопротивления пропорциональна квадрату скорости, т.е. где x- const 

20.1)Закон сохранения движения центра масс. Примеры.
2)Решение задачи о движении тела, брошенного под углом к горизонту.
1)
А) Если гл. вектор внешних сил, прилож. к механ. сист. все время равен 0 то ее центр масс находится в покое или движется равномерно и прямолинейно.
Б) Если проекция гл. вектора внеш. сил на какую- нибудь неподвижную ось остается все время равным 0 то и проекция ц. масс механ. сист на эту ось движется равномерно и прямолинейно.
Рассмотрим пример, который позволяет применить т - му о движ. Центра масс: движение тела по горизонтальной шероховатой пов - ти. Перемещение ц. масс тела происходит за счет сцепления между обувью и поверхностью, т.е за счет внешних по отношению к человеку сил, то возникают эти силы только при соотв. напряж. мускулов человека, что создает позицию движения за счет них, однако если бы сцепление отсутствовало, то человек не мог бы перемещаться наверх.
 Fм
Fм

Fистр
21.1) Кинетическая энергия материальной точки и механической системы. Вычисление кинетической энергии твердого тела в различных случаях его движения.
2)Закон сохранения количества движения механической системы. Примеры.

1)Кинетической энергией метер. т-ки называется величина равная половине произведения ее массы на квадрат скорости:
Кинетической энергией механической системы называется сумма кинетических энергий всех входящих в нее материальных точек:
2)
Если главный вектор всех действующих на систему внешних сил равен 0, то вектор количества движения системы есть величина постоянная.
Если алгебраическая сумма проекций на какую-нибудь ось всех действующих на механическую систему внешних сил равна 0, то проекция вектора количества движения на эту ось есть величина постоянная.
22.1)Элементарная работа силы, ее аналитическое выражение. Работа силы на конечном пути. Работа силы тяжести.
2)Главные оси и главные моменты инерции. Свойства главных осей и главных центральных осей инерции.
1)Элементарной работой силы F называется скалярное произведение: A=(F∆r), где ∆r вектор элементарного перемещения точки, приложения силы, произошедшего в результате действия силы.
Работа силы на конечном перемещении равна алгебраической сумме ее работ на отдельных элементарных участках:

При движении тела по непрерывной траектории можно перейти к пределу при стремлении числа участков к бесконечности и получить:
2)Поскольку уравнение не содержит координат первой степени, то его центр совпадает с началом координат. Три оси симметрии эллипсоида инерции называются – главными осями инерции относительно точки 0, а момент инерции относительно осей – главным моментом инерции.
Если выбрать систему координат так, что бы оси совпадали с главными осями инерции механ. сист, то уравнение эллипса примет вид: J*x X2* + J*y Y2* + J*z Z2* = 1
Каждой точке соотв. свой эллипс инерции и если он известен, то можно найти момент инерции относительно любой оси, проходящей через данную точку. Эллипсоид, соотв. центру масс тела называется центральным эллипсоидом инерции, а его оси симметрии главными центральными осями инерции.
Если известны главные центры моментов инерции, то можно построить центр эллипсоид. инерции, а отсюда следует определение: моментом инерции относительно любой оси, проходящей через центр масс системы.
23.1) Работа силы упругости и силы тяготения. Работа сил, приложенных к твёрдому телу, вращающемуся вокруг неподвижной оси.
2)Теорема об изменении кинетического момента механической системы по отношению к центру масс.
 |
Работа силы упругости.
 |
Работа силы тяготения.
Работа сил на конечном перемещении равна произведению главного момента внешних сил относительно оси вращения на конечное изменение угла поворота тела.
2)А) Относительно неподвижного центра Производная по времени от кинетического момента относительно неподвижного центра равна главному моменту всех внешних сил, действующих на систему относительно того же центра. Б) Относительно центра системы координат, движущимся поступательно вместе с центром масс. Производная по времени от кинетического момента механической системы, относительно центра системы координат, движущимся поступательно вместе с центром масс, равна главному моменту всех внешних сил, относительно центра масс.
 |
 |
Дата добавления: 2015-01-19; просмотров: 237; Мы поможем в написании вашей работы!; Нарушение авторских прав |