КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Нелинейных систем управления
Пример 5.15. Под действием возмущающих сил спутник поворачивается относительно оси вращения. Предположим , что спутник жёсткий , трение о воздух отсутствует .
Требуется стабилизировать положение спутника относительно оси вращения, применив систему управления положением спутника с обратной связью по скорости (рис. 5.50).

 - выходная функция
- выходная функция
спутник
двигатели

0 - ось вращения
двигатели
 - входное воздействие
- входное воздействие
Рис. 5.50. Управление положением спутника
Вращающий момент, приложенный к спутнику с целью стабилизации положения в пространстве, создаётся парой двигателей.
Уравнение динамики вращательного движения:

 ,
,
где – момент инерции спутника,
“ – “ - момент направлен в сторону уменьшения рассогласования.
Преобразуем уравнение к виду
 , обозначим u(t) =
, обозначим u(t) =  , тогда
, тогда  .
.
Передаточная функция спутника  .
.
|

Мвр/
g=0 
 u(t)
u(t) 

_ _
-Мвр/
Гироскопический датчик скорости
Рис.5.51. Структурная схема системы стабилизации положения
спутника
 - команда на выключение двигателей системы.
- команда на выключение двигателей системы.
Обозначим  (t)=y , тогда модель системы (рис. 5.51) в форме переменных состояния примет вид
(t)=y , тогда модель системы (рис. 5.51) в форме переменных состояния примет вид
|
 - уравнение в форме Коши.
- уравнение в форме Коши.
Разделив второе уравнение на первое, получим уравнение фазовых траекторий для области А:
 , для области Б:
, для области Б:  .
.
Следовательно , фазовые траектории представляют собой параболы
(рис. 5.52) :
для области А:  , для области В:
, для области В:  ,
,
где C1 определяется из начальных условий :  =>
=> 
 ) ,
) ,
аналогично 
 ).
).
Корректирующая обратная связь аналогична действию ПД – регулятора прямого канала.
Скользящий режим не возникает, если характеристика релейного элемента имеет гистерезис.
При скользящем режиме входной сигнал отслеживается аналогично тому, как это происходит в линейных системах.
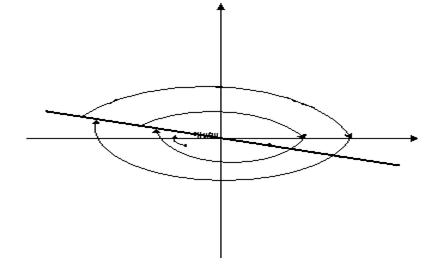
 y A
y A  - условие
- условие
|


 Скользящий режим двигателей
Скользящий режим двигателей
(дребезг) Фазовые траектории системы.

 .
.
x
Линия переключения y=  ;
;

 .
.
Асимптотически
устойчивый центр
MN – особый отрезок.
Б Фазовая плоскость
Рис. 5.52. Фазовые траектории системы
Дата добавления: 2015-01-29; просмотров: 123; Мы поможем в написании вашей работы!; Нарушение авторских прав |