КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Основные термины и определения.
Управление – воздействие на объект или систему с заданной целью.
Автоматическое управление – управление без участия оператора.
Наука об управлении – кибернетика.
Математическая модель – описание реального объекта средствами математики.
Система – совокупность элементов, объединенных связями.
Система управления:
- объект управления;
- регулятор.
Объект управления и его свойства:
1. Линейность (нелинейность).
2. Способность к накоплению.
3. Инертность.
4. Склонность к колебаниям.
5. Устойчивость.
6. Наблюдаемость, предсказуемость, управляемость.
7. Запаздывание.
Режимы функционирования объекта (системы):
- статический (все параметры постоянны);
- динамический (параметры меняются с течением времени).
Задачи управления:
- стабилизация;
- слежение;
- самоорганизация (оптимизация по некоторому критерию).
Основные принципы управления.
Структурная реализация принципов управления.
Основные виды САУ, их области применения, достоинства и недостатки:
1. Разомкнутая система с жестким управлением.
2. Разомкнутая система с компенсацией по возмущению.
3. Система с обратной связью по отклонению.
4. Комбинированная система (с обр. связью по отклонению и компенсацией по возмущению).
5. Оптимальная (экстремальная) система.
Синергетические принципы управления, их основные отличия от классических принципов управления.
Лекция 2. Математическое описание САУ.
Линеаризация дифференциальных уравнений.
Решение линейных дифференциальных уравнений, преобразования Лапласа. Сигналы.
Математические модели систем, воздействий и реакций.
1. Дифференциальное уравнение связывает воздействие на систему и ее реакцию на это воздействие. Воздействие это входной сигнал системы, а реакция – её выходной сигнал. Дифференциальное уравнение – это математическая модель системы или объекта управления.
2. При управлении нелинейными объектами приращение управляющих воздействий и их производных малы по сравнению со стационарными значениями, поэтому система может быть линеаризована, т.е. нелинейное дифференциальное уравнение может быть заменено линейным относительно этих приращений:
 , (1)
, (1)
где приращения  ,
,  – малы, начальные условия для приращений – нулевые;
– малы, начальные условия для приращений – нулевые;
коэффициенты  и
и  определяются рабочей точкой, в которой осуществлена линеаризация.
определяются рабочей точкой, в которой осуществлена линеаризация.
По условиям реализуемости объекта, описываемого уравнением (1), необходимо выполнение условия  .
.
3. Методы решения дифференциальных уравнений
апостериорные (аналитические):
- классический;
- операторный (преобразования Лапласа);
- спектральный (преобразования Фурье);
методы текущего (реального) времени:
- численные методы решения ДУ (Эйлера, Рунге-Кутта и др.);
- интегралы Дюамеля и свертки;
- моделирования на аналоговых вычислительных машинах, а также на их виртуальных квазианалогах (Simulink-Matlab, ПК МВТУ).
Последние, на самом деле, реализуют численные методы решения, но представляют исследователю результаты в аналоговой форме.
Применяя прямое преобразование Лапласа к дифференциальному уравнению (1), получим:
 , (2)
, (2)
где  и
и  - изображения по Лапласу соответственно функций
- изображения по Лапласу соответственно функций  и
и  .
.
Апостериорные методы позволяют ответить на вопрос о том, как поведет себя некоторая система, если на нее будет подан известный заранее на всем временном интервале пробный сигнал, например ступенчатая функция или какой-нибудь другой.
Апостериорные методы не способны дать ответ на вопрос о поведении системы, если воздействие на нее поступает в режиме реального времени, т.е. когда не известно, как оно будет изменяться в дальнейшем. Такими возможностями обладают методы текущего времени.
4. Сигналы:
- гармонический (синусоидальный)  ;
;
- периодический  ;
;
- ступенчатый единичный сигнал  ;
;
- дельта-функция Дирака  ;
;
- степенная функция  .
.
Лекция 3. Передаточные функции. Комплексный коэффициент передачи.
Амплитудно-частотная характеристика. Фазо-частотная характеристика.
1. Передаточная функция.
Из выражения (2) Лекции 2 получим
 или
или  , (3)
, (3)
где  - передаточная функция линейной системы, описываемой уравнением (1);
- передаточная функция линейной системы, описываемой уравнением (1);
 - характеристический полином передаточной функции
- характеристический полином передаточной функции  .
.
Корни уравнения  - полюса передаточной функции .
- полюса передаточной функции .
Корни уравнения  - нули передаточной функции .
- нули передаточной функции .
2. ККП - комплексный коэффициент передачи.
В системе с нулевыми начальными условиями ККП получается из передаточной функции:  . ККП связывает спектр выходного
. ККП связывает спектр выходного  сигнала со спектром входного сигнала
сигнала со спектром входного сигнала  :
:  .
.
ККП может быть представлен в виде модуля и аргумента (показательная форма записи комплексной функции):  .
.
Спектр синусоидального сигнала  это его комплексная амплитуда
это его комплексная амплитуда  .
.
Тогда  , откуда
, откуда  и
и  .
.
Таким образом, имеем:  - амплитудно-частотная характеристика (AЧХ),
- амплитудно-частотная характеристика (AЧХ),
 - фазо-частотная характеристика (ФЧХ).
- фазо-частотная характеристика (ФЧХ).
3. Логарифмические АЧХ и ФЧХ (ЛАЧХ и ЛФЧХ) – это частотные характеристики, представленные в логарифмическом масштабе. Это позволяет графически показать частотные характеристики в больших частотном и амплитудном диапазонах.
Усиление (коэффициент усиления) откладывается в децибелах:  .
.
| во сколько раз | на сколько дБ |
| 4-2х2 | 12=6+6 |
| 100=10х10 | 40=20+20 |
| 1/2 | -6 |
| 1/100 | -40 |
| 1/1000000 | -120 |
Декада – изменение частоты в 10 раз. Октава – изменение частоты в 2 раза.
4. Годограф ККП – это кривая на комплексной плоскости, которую пробегает конец вектора ККП при изменении частоты от 0 до  .
.
Годограф ККП или АФЧХ (амплитудно - фазочастотная характеристика) позволяет на одном графике показать всю информацию, которая содержится на АЧХ и ФЧХ.
АФЧХ изображается на комплексной плоскости:  .
.
5. Переходная функция  – реакция линейной системы на ступенчатое воздействие .
– реакция линейной системы на ступенчатое воздействие .
6. Весовая функция  – это реакция линейной системы на дельта-функцию Дирака.
– это реакция линейной системы на дельта-функцию Дирака.
Лекция 4. Типовые динамические звенья линейных систем.
Классификация. Простейшие звенья. Звенья первого порядка.
Классификация звеньев строится по возрастанию совокупности физических свойств, которыми обладают звенья, а также по возрастанию степени дифференциальных уравнений, которыми они описываются:
- простейшие звенья:
- пропорциональное;
- интегрирующее;
- дифференцирующее;
- звенья I порядка:
- апериодическое (инерционное);
- инерционно-дифференцирующее (реальное дифференцирующее);
- инерционно-форсирующее;
- звенья II порядка:
- колебательное и его частный случай
- апериодическое звено II порядка;
- звено III порядка:
- звено Вышнеградского - простейшее из звеньев с положительными коэффициентами характеристического полинома,способных терять устойчивость;
- звено запаздывания.
1. Пропорциональное звено:  .
.  .
.
2. Интегрирующее звено:  .
.  .
.  .
.  .
.  .
.
ЛАЧХ интегратора имеет отрицательный угловой коэффициент  .
.
3. Дифференцирующее звено:  .
.  .
.  .
.
 .
.  .
.
4. Инерционное звено:  .
.  .
.  .
.
 .
.  .
.  .
.
ЛАЧХ имеет горизонтальный участок и нисходящий участок с темпом снижения коэффициента усиления 20 дБ/дек. Переходный процесс завершается при  :
:  .
.
Частота сопряжения – частота, на которой происходит пересечение асимптот двух различных участков ЛАЧХ. Для инерционного звена частота сопряжения:  .
.
Годограф инерционного звена – полуокружность с радиусом  , расположенная в четвертом квадранте комплексной плоскости.
, расположенная в четвертом квадранте комплексной плоскости.
5. Инерционно-дифференцирующее:  .
.
6. Инерционно-форсирующее:  .
.
Лекция 5. Звенья второго порядка. Колебательное звено.
1. Колебательное звено.
Дифференциальное уравнение, описывающее движение механической колебательной
системы
 ,
,
которое может быть представлено в виде
 ,
,
где  - постоянная времени;
- постоянная времени;  - коэффициент демпфирования (
- коэффициент демпфирования (  ).
).
Передаточная функция:  .
.
Корни характеристического уравнения  звена 2-го порядка:
звена 2-го порядка:
 .
.
При  или
или  процесс колебательный (звено колебательное).
процесс колебательный (звено колебательное).
При  или
или  колебаний нет, процесс апериодический (звено апериодическое).
колебаний нет, процесс апериодический (звено апериодическое).
При  или
или  имеем критическое значение коэффициента демпфирования.
имеем критическое значение коэффициента демпфирования.
Частотные и временные характеристики колебательного звена имеют следующий вид:
КПП:  ,
,
АЧХ:  .
.
ФЧХ: 
 .
.
Колебательное звено имеет наклон ЛАЧХ -40дБ/дек и максимальный сдвиг фазы 
Переходная функция колебательного звена при :
 ,
,  ,
,  .
.
Весовая функция  .
.
Частота сопряжения колебательного звена . На этой частоте возможен значительный подъем АЧХ (резонанс).
Период колебаний колебательного звена  и при
и при  равен
равен  .
.
Длительность переходного процесса колебательного звена при равна  .
.
При  длительность переходного процесса минимальна и составляет
длительность переходного процесса минимальна и составляет  .
.
При она составляет  .
.
Лекция 6. Апериодическое звено. Звено третьего порядка. Звено запаздывания.
1. Передаточная функция апериодического звена (звена второго порядка при ) может быть представлена в виде:
 ,
,
где  и
и  , откуда
, откуда  и
и  .
.
Апериодическое звено имеет две частоты сопряжения:  и
и  .
.
2. Звено, у которого передаточная функция имеет характеристический полином третьего порядка вида
 ,
,
называют звеном третьего порядка или звеном Вышнеградского. В зависимости от значений коэффициентов  это звено может терять устойчивость. Условия, при которых это происходит, будут подробно рассмотрены ниже при оценке устойчивости систем.
это звено может терять устойчивость. Условия, при которых это происходит, будут подробно рассмотрены ниже при оценке устойчивости систем.
3. Звеном запаздывания называется звено, передающее сигнал со входа на выход без искажения его формы, но с некоторой задержкой  во времени. В некоторых случаях звено запаздывания вводится при расчете системы условно.
во времени. В некоторых случаях звено запаздывания вводится при расчете системы условно.
Уравнение звена запаздывания  не является дифференциальным и относится к классу особых уравнений со смещенным аргументом. Применяя к этому уравнению преобразование Лапласа, получим:
не является дифференциальным и относится к классу особых уравнений со смещенным аргументом. Применяя к этому уравнению преобразование Лапласа, получим:  , откуда
, откуда  и
и  .
.
Характеристики звена запаздывания показаны на рис.1.
Определенный интерес представляет сравнение ЛАЧХ (ЛФЧХ) звена запаздывания и ЛАЧХ (ЛФЧХ) инерционного звена первого порядка – рис. 2.

На рис.2 жирными линиями показаны характеристики звена запаздывания с  , а обычными линиями – характеристики апериодического звена первого порядка с
, а обычными линиями – характеристики апериодического звена первого порядка с  .
.
Как следует из рис.2, для медленно изменяющихся сигналов (в области низких частот) звено запаздывания можно заменить апериодическим звеном с постоянной времени , равной по величине времени запаздывания .
Лекция 7. Соединения звеньев. Передаточные функции замкнутых и разомкнутых САР. Преобразования структурных схем.
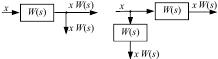
1. Последовательное соединение.
Теорема 1. Передаточная функция последовательного соединения звеньев равна произведению передаточных функций отдельных звеньев:  .
.
Следствие. ЛАЧХ последовательного соединения звеньев равна сумме ЛАЧХ отдельных звеньев:  .
.
2. Параллельное соединение согласное.
Теорема 2. Передаточная функция параллельного согласного соединения звеньев равна сумме передаточных функций отдельных звеньев:  .
.
Следствие. Переходная функция параллельного согласного соединения звеньев равна сумме переходных функций отдельных звеньев:  .
.
3. Параллельное соединение встречное (с обратной связью).
Теорема 3. Передаточная функция параллельного встречного соединения звеньев равна:
 , где
, где  - передаточная функция звена прямой связи;
- передаточная функция звена прямой связи;
 – передаточная функция звена отрицательной обратной связи.
– передаточная функция звена отрицательной обратной связи.
Если обратная связь – единичная жесткая  , то
, то  .
.
4. Пусть передаточная функция разомкнутой системы –  . Тогда передаточная функция замкнутой системы с единичной жесткой обратной связью
. Тогда передаточная функция замкнутой системы с единичной жесткой обратной связью  будет:
будет:
 .
.
5. Преобразования структурных схем.
При переносе узла через звено против направления сигнала появляется дополнительное звено с передаточной функцией  - рис.1а .
- рис.1а .
Перенос узла через звено по направлению сигнала приводит к появлению дополнительного звена с передаточной функцией  - рис.1б. Отметим, что появление звена с передаточной функцией не желательно по условиям его реализуемости.
- рис.1б. Отметим, что появление звена с передаточной функцией не желательно по условиям его реализуемости.

а) б)
Рис. 1.
Перенос сумматора через звено по направлению сигнала сопровождается появлением дополнительного звена с передаточной функцией - рис.2а.
Перенос сумматора через звено против направления сигнала приводит к появлению дополнительного звена с передаточной функцией - рис.2б.


а) б)
Рис. 2.
Аналогичные принципы сохраняются и при других преобразованиях структурных схем.
Лекция 8. Типовая одноконтурная САР. Уравнения динамики и статики типовой САР.
Статические и астатические САР. П-, ПИ- и ПИД – регуляторы.
Типовая одноконтурная САР. Структурная схема.

Передаточная функция разомкнутого контура:  .
.
Передаточная функция замкнутой САР по каналу управления:  .
.
Передаточная функция замкнутой САР по ошибке от задания:  .
.
Передаточная функция замкнутой САР по возмущению:  .
.
Передаточная функция замкнутой САР по ошибке, от возмущения:  .
.
Уравнение динамики типовой САР в операторной форме имеет вид
- для выходного сигнала:  ; (1)
; (1)
- для ошибки:  . (2)
. (2)
Отметим, что передаточная функция по ошибке есть основное средство исследования точности САУ. Разложение этой передаточной функции в ряд позволит в явном виде получить коэффициенты ошибок.
Для статической системы в уравнениях (1), (2) имеем  и при переходе к оригиналам они примут вид уравнений статики:
и при переходе к оригиналам они примут вид уравнений статики:
 и
и  .
.
Если у системы статическая ошибка равна нулю, то такая система называется астатической или обладает астатизмом (по заданию или по возмущению).
Если регулятор содержит только пропорциональное звено, то его называют П-регулятор.
Регулятор, содержащий параллельно включенные пропорциональное и интегральное звенья, называется ПИ-регулятором.
Если регулятор состоит из параллельно включенных пропорционального, интегрального и дифференцирующего звеньев, то это ПИД-регулятор.
Передаточная функция ПИД-регулятора:  ,
,
где  ,
,  ,
,  - коэффициенты усиления соответственно пропорционального, интегрального и дифференцирующего звеньев.
- коэффициенты усиления соответственно пропорционального, интегрального и дифференцирующего звеньев.
С помощью интегральной и пропорциональной составляющих можно обеспечить первый порядок астатизма и желаемую статическую точность в ущерб запасу устойчивости. А дифференциальная составляющая повышает запас устойчивости.
В настоящее время ПИД-регуляторы выпускаются в широком ассортименте и в разнообразных реализациях, включая программную на контроллерах.
Лекция 9. Устойчивость линейных САР. Положения А.М. Ляпунова.
Правило Стодолы. Алгебраический критерий устойчивости Гурвица.
Устойчивость – это способность системы возвращаться к прежнему равновесному сос-тоянию или режиму движения после прекращения действия возмущения, нарушившего это сос-тояние или режим.Устойчивость это собственное, внутреннее свойство объекта или системы.
Система устойчива «в малом», если определен факт наличия устойчивости, но не опре-делены ее границы. Система устойчива «в большом», когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы. «Глобальная устойчивость» – это устойчивость при любых обстоятельствах.
Условие устойчивости систем по Ляпунову формулируется так: в устойчивой системе свободная составляющая решения уравнения динамики, записанному в отклонениях, с течением времени должна уменьшаться.
В соответствии с классическим методом решение дифференциального уравнения ищется в виде:  , где
, где  - общее решение однородного дифференциального уравнения, то есть уравнения с нулевой правой частью;
- общее решение однородного дифференциального уравнения, то есть уравнения с нулевой правой частью;  - частное решение неоднород-ного дифференциального уравнения, под которым понимается уравнение с ненулевой правой частью. После прекращения воздействия возмущения
- частное решение неоднород-ного дифференциального уравнения, под которым понимается уравнение с ненулевой правой частью. После прекращения воздействия возмущения  и дальнейшее поведение системы полностью определяется ее внутренними свойствами. Из теории линейных дифференциальных уравнений известно, что
и дальнейшее поведение системы полностью определяется ее внутренними свойствами. Из теории линейных дифференциальных уравнений известно, что  , где
, где  - постоянные интегрирования;
- постоянные интегрирования;  - корни характеристического уравнения системы. Корни могут быть либо вещественными
- корни характеристического уравнения системы. Корни могут быть либо вещественными  , либо попарно комплексно сопряженными
, либо попарно комплексно сопряженными  . Если вещественная часть корня отрицательна, то корни называют «левыми» (находящимися слева от мнимой оси комплексной плоскости), и решение имеет затухающий характер, т.е. с течением времени стремится к нулю.
. Если вещественная часть корня отрицательна, то корни называют «левыми» (находящимися слева от мнимой оси комплексной плоскости), и решение имеет затухающий характер, т.е. с течением времени стремится к нулю.
По Ляпуновулинейная (линеаризованная) САР устойчива, тогда и только тогда если все корни ее характеристического полинома «левые».
Необходимое условие устойчивости – правило Стодолы:
- если корни характеристического уравнения лежат в левой полуплоскости (система устойчива), то все коэффициенты характеристического уравнения имеют один знак.
Критерий устойчивости Гурвица - если характеристический полином САУ имеет вид  ,
,
то САР устойчива тогда, и только тогда, если определитель Гурвица

и все его диагональные миноры положительны, откуда следует, что если:
1)  => уравнение:
=> уравнение:  . Определитель Гурвица:
. Определитель Гурвица:  при
при  , то есть условие устойчивости:
, то есть условие устойчивости: ,;
,;
2)  => уравнение:
=> уравнение:  . Определители Гурвица:
. Определители Гурвица:  ,
,  , так как
, так как  , то есть условие устойчивости: , ,
, то есть условие устойчивости: , ,  ;
;
3)  => уравнение:
=> уравнение:  . Определители Гурвица: , ,
. Определители Гурвица: , ,  , условие устойчивости: , , ,
, условие устойчивости: , , ,  ,
,  .
.
Лекция 10. Частотные критерии устойчивости (Михайлова, Найквиста).
Частотные критерии основаны на «принципе аргумента».
Характеристический полином системы
 .
.
Его корни  , где
, где  .
.
Принцип аргумента состоит в том, что при изменении  от 0 до каждый вектор
от 0 до каждый вектор  повернется на комплексной плоскости против часовой стрелки на угол
повернется на комплексной плоскости против часовой стрелки на угол  , если корень – левый, и – по часовой стрелке, если корень – правый. Тогда для полинома степени
, если корень – левый, и – по часовой стрелке, если корень – правый. Тогда для полинома степени  вектор
вектор  повернется на угол
повернется на угол  , если все корней полинома – левые.
, если все корней полинома – левые.
Годограф Михайлова – кривая на комплексной плоскости, которую описывает конец вектора характеристического полинома системы при изменении частоты от 0 до .
Дата добавления: 2015-01-29; просмотров: 92; Мы поможем в написании вашей работы!; Нарушение авторских прав |