КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Классификация СРО
-простые и сложные (физически однородная или неоднородная инф-ция)
-детерминированные
-вероятностные
-логические
структурные
-комбинированные
Детерминированные-алгоритм распознавании исп-ет геометрические меры близости, расст-ие м/ду образом и эталонами
Вероятностные применеие алгоритмов распознавания предусматривает наличие вер-ых зав-ей между признаками образов и классами к котор.они относятся.
Логические – наличие логич.связей, описываемых с помощью системы логич Ур-ий, где переменными явл.логич.признаки распознаваемых образов, а нез.величинами:классы, к котор.они относятся.
Структурные –исп-ся специальные языки, состоящие из предложений каждое из которых описывает объекты, принадлежащие к конкретному классу, на основе этих языков строятся алгоритмы распознавания.
Комбинированные – исп-ют специально разработанный метод вычисления оценок, на основе котор.строится алгоритмы распознавания.
№ 58 Критерии оптимальности многофакторных планов эксперимента. Геометрическая интерпретация поверхности отклика ПФЭ.
Цель любого экспериментального исследования - это раскрытие некоторых закономерностей функционирования рассматриваемых систем, т.е. нахождение функциональной связи, между выходом и независимыми факторами. Эксперимент, в котором используется закономерное варьирование различных двух или более независимых факторов, называется многофакторным. Количество факторов обозначается буквой "к".
Выход - это результат, численная характеристика цели исследования. Эквивалентными терминами являются: выходной параметр, критерий оптимизации, отклик, значение целевой функции и т.д. Обозначается буквой "у".
Геометрическая интерпретация выхода представляет собой поверхность отклика (при двух факторах) или гиперповерхность отклика (более двух факторов).
Алгебраическая интерпретация выхода представляет собой функцию отклика или математическую модель процесса (уравнение регрессии, регрессионную модель).
Фактором называется измеряемая переменная величина, принимающая определенные значения и воздействующая на рассматриваемую систему, т.е. на объект исследований. Обозначается буквой "х".
Подавляющее число изучаемых объектов относится к классу сложных систем. В общем случае любой объект исследований можно представить в виде некоторого множества точек в факторном пространстве, которое может быть условно разбито на два подмножества: "черное" и "светлое".
Первое, называемое "черным ящиком" бернетическое понятие системы с неполным функционирования. В этом случае структура процесса неизвестна и модель может быть представлена в виде некоторой аппроксимирующей функции. "Светлый ящик" - подмножество с известным механизмом процесса, традиционными экспериментальными задачами и известной структурой модели, например, в виде различных физических законов.
На процесс исследований всегда накладываются ограничения, определяемые возможностями измерительной аппаратуры, стремлением к снижению временных затрат на постановку опытов и материальных -на материалы и приборы. Эти ограничения приводят к тому, что исследователь всегда располагает относительно небольшим объемом экспериментальных данных, на основании которых он должен делать выводы о свойствах и поведении объекта изучения. На результаты опытов, кроме того, влияет большое число случайных неуправляемых факторов. Последнее обстоятельство требует включения в рассмотрение не только оценки результатов, но и оценки их точности. Следовательно, необходима статистическая обработка данных.
Традиционными методами можно получить такие же результаты, как и многофакторными экспериментами. Однако там нет такой четкости и логически упорядоченной стратегии, так как исследователь ведет поиск, руководствуясь только своей интуицией. Это приводит, как правило, к постановке многих лишних опытов при снижении точностных характеристик выхода.
Кроме того, при планировании и реализации многофакторных экспериментов оценка параметров и установление доверительных границ для них производится по стандартной методике, что обеспечивает сопоставимость результатов данных исследователей на разном оборудовании, в разных странах.
Таким образом, математическое планирование экспериментов -это процедура выбора числа и условий постановки опытов, необходимых и достаточных для решения поставленной задачи с требуемой точностью, методов обработки результатов и принятия решений.
Критерии оптимальности факторных планов
Рассматривая планирование экспериментов как аналог раздела прикладной математики, можно сформулировать ряд положений, играющих роль аксиом. Этими положениями являются критерии оптимальности эксперимента. Все их можно условно разделить на две группы: статические и динамические.
Первые образуют мозаику взаимно несовместимых положений, из которых можно выделить лишь иерархически более важные.
Вторые - определяют оптимальную стратегию в последовательности проведения опытов.
Другая классификация выделяет критерии, связанные с точностью оценки коэффициентов регрессии, и критерии, определяющие ошибку в оценке поверхности отклика. На сформулированных на математическом языке критериях оптимальности строится вся теория математического планирования многофакторного эксперимента.
Любые экспериментальные исследования содержат некоторую неопределенность (ошибку, погрешность), и экспериментатор должен стремиться не исключить ее, что невозможно, а минимизировать.
Рассмотрим критерии оптимальности факторных планов, позволяющие оценить коэффициенты регрессии. Для этого обратимся, например, к матрице планирования - условному обозначению сочетаний уровней переменных факторов, соответствующих условиям проведения отдельных экспериментов (рис. 6.1), и рассмотрим эти условия.
| k | Переменные факторы | ||
| N | X1 | Х2 | Х3 |
| —1 | -1 | -1 | |
| -1 | -1 | +1 | |
| -1 | +1 | -1 | |
| -1 | +1 | +1 | |
| + 1 | -1 | -1 | |
| +1 | -1 | +1 | |
| + 1 | +1 | —1 | |
| + 1 | +1 | +1 |
Рис.6.1. Матрица планирования двухуровнего трехфакторного эксперимента
1. Условие ортогональности, обеспечивающее получение независимых оценок коэффициентов регрессии и их дисперсий.
1.1. Условие ортогональности к столбцу или условие симметричности гласит: " Алгебра и ческа я сумма элементов любого столбца матрицы планирования равна нулю", т.е. планы симметричны относительно центра эксперимента.
N ∑xji=0 i=1 (6.1)
где j - номер фактора; i - номер опыта (серии опытов).
1.2. Условие парной ортогональности: "Сумма почленных произведений двух любых разных столбцов матрицы планирования равна нулю".
N
∑xik*xij=0,k≠j
Это свойство позволяет упрощать или усложнять модели, исключая или добавляя коэффициенты без пересчета уже найденных параметров.
2. Условие нормировки: сумма квадратов элементов любого 1-го столбца матрицы равна числу опытов (серий опытов) - N.
N
∑x2ji=N (6.3)
i=1
В соответствии с этим положением коэффициенты уравнения регрессии определяются формулами:
bj=N-1*xij*y (j=1,2,3,...k), а их дисперсия:
Sb2=Sy2/N*n
где S2y - дисперсия воспроизводимости опытов; п - число параллельных опытов.
А - оптимальность (от английского термина average variance - средняя дисперсия) соответствует планам с минимальной средней дисперсией оценок коэффициентов регрессии.
D - оптимальность (по начальной букве английского слова determinant- определитель) обеспечивает минимум обобщенной дисперсии всех оценок коэффициентов регрессии.
Е - оптимальность (от английского eigen value – собственное значение) не допускает наличие слишком больших дисперсий у некоторых оценок коэффициентов регрессии.
Критериями оптимальности планов, связанных с ошибками в оценке поверхности отклика, будут следующие.
Насыщенность плана - приближение числа опытов к числу коэффициентов уравнения регрессии. Этот критерий вступает в противоречие с желанием экспериментатора максимально сократить число опытов.
Композиционность - возможность перехода от простых моделей к более сложным при сохранении результатов первоначальных шагов.
Ротатабельность (от английского rotatable -• способный к вращению) - это наличие одинаковой дисперсии во всех направлениях факторного пространства на равных расстояниях от центра плана.
G - оптимальность (от английского genera! variance – общая дисперсия) минимизирует максимально возможную дисперсию предсказаний - дисперсию экстраполированных (продолженных за рамки эксперимента) значений выхода.
Q - оптимальность минимизирует среднюю дисперсию предсказаний.
Возможность преобразования независимых факторов (переменных) при сохранении оптимальности плана.
6.1.4. Задачи, решаемые факторными планами
Все экспериментальные задачи, решаемые с помощью оптимальных факторных планов, можно разделить на две группы:
оптимизационные или экстремальные задачи, задачи описания или интерполяционные. Оптимизационные задачи связаны с нахождением экстремума поверхности отклика, обеспечивающего оптимальное функционирование рассматриваемой системы. Например, оптимизация состава сплава. Факторами являются процентное содержание легирующих компонентов, а выходом - наибольшая прочность сплава. Здесь величина экстремума выхода и оптимальные значения факторов заранее неизвестны. Для подобных задач характерны несколько случаев.
Имеется несколько экстремумов. Здесь среди частных экстремумов необходимо найти глобальный.
Оптимальная величина параметра оптимизации имеет нечисловое одностороннее логическое ограничение. Например, привес бройлеров или минимум себестоимости изделия, Понятно, что нельзя обеспечить привес бройлера больше, чем вес курицы, или свести себестоимость к нулю. Однако, строго говоря, в нашем случае ограничение отсутствует, так как оптимизируемые характеристики могут изменяться бесконечно, но при уменьшении величины этого изменения.
Оптимум выхода имеет конкретное одностороннее физическое ограничение. Например, выход годного на литье или расход моечного раствора. Известно, что выход годного не может превысить 100%, а минимальная норма моечного раствора должна обеспечивать смачивание всей очищаемой поверхности. Здесь оптимум асимптотически приближается к ограничению, но не должен когда-либо его превысить.
Наконец, оптимум может носить качественный характер одного из нескольких вариантов (технологических процессов, конструкций аппаратов, работы операторов).
Для каждого случая имеется некоторая оптимальная стратегия, но не всегда формализованная, а чаще всего основанная на опыте и интуиции экспериментатора.
Задачи описания носят интерполяционный характер. Формируется расчетная формула - модель для определения параметра выхода в любой точке исследованного диапазона факторов. Например, формула механической обработки, связывающая скорость резания V с глубиной t, подачей S и стойкостью инструмента Т:
V= Cv/tx∙Sy∙Tm (6.6)
Иногда, если невозможно поставить эксперимент во всем рассматриваемом диапазоне факторного пространства, полученные модели используют для экстраполяции выхода, прогнозирования поведения системы. Оценка точности результатов осуществляется дисперсией предсказаний, а план эксперимента должен обладать ротатабельностью.
Наконец, для экстремальных зависимостей, когда известен оптимум выхода и его допустимые колебания, интерполяционная (линеаризованная или квадратичная) модель позволяет рассчитать допустимый разброс факторов, обеспечивающих колебание выхода в заданных пределах.
В зависимости от степени кривизны поверхности отклика она может быть описана линейной функцией относительно переменных и нелинейной, например, квадратичной. Выбор плана экспериментальных исследований при отсутствии априорной информации осуществляется на основе личного опыта исследователя.
Таким образом, экспериментатор обосновывает тип задачи, выбор оптимального плана, его реализацию и принятие соответствующих решений после анализа полученных результатов.
Критерий оптимизации
При постановке оптимизационных задач очень важно правильно определить параметр, который требуется оптимизировать. Эта часть исследований не поддается формализации и целиком зависит от опыта и интуиции исследователя.
Параметр оптимизации является реакцией (откликом) исследуемой системы на воздействие факторов. Поскольку реакция любого объекта исследований весьма многогранна, необходимо выбрать аспект реакции, представляющий наибольший интерес, то есть параметр оптимизации является количественной характеристикой цели исследований.
В качестве оптимизируемых характеристик в различных системах могут быть выбраны следующие параметры
Технологические, связанные с процессом производства (жирность молока, твердость металла),
Конструктивные, определяющие конструкцию (зазор в подшипнике скольжения, толщина стен строения),
Материаловедческие, характеризующие свойства используемых материалов (прочность кирпича, негорючесть облицовки).
Эксплуатационные, служащие оценкой работы системы (ресурс двигателя, износостойкость подошвы).
5. Экономические (себестоимость, рентабельность). Предпочтительно использовать количественные параметры, но могут быть выбраны и качественные:
-тип технологического процесса изготовления какой-либо детали;
различные конструкции некоторого узла;
марка или структура применяемого материала;
ремонтопригодность или резервируемость;
необходимость в капитальных затратах.
Для перевода качественных параметров в количественные может быть использован, например, ранговый подход или разбиение матрицы экспериментального плана на блоки.
Движение в факторном пространстве к оптимуму возможно, если выбран один единственный параметр оптимизации. При наличии нескольких параметров (например, точность, себестоимость, ресурс) все, кроме одного, выступают уже не параметрами оптимизации, а ограничениями (оптимум ресурса при установленной точности и себестоимости).
Основные требования к параметру оптимизации можно сформулировать в следующем виде:
- параметр оптимизации должен быть количественным;
- измеряемым;
- должен выражаться одним числом (например, соотношение компонентов А : В = 3 : 2 выражается одним числом - 1,5);
- быть однозначным в статистическом смысле (заданному набору факторов соответствует одно значение выхода);
- эффективным в статистическом смысле, т.е. определяемым с наибольшей достижимой точностью;
- существующим для всех исследуемых состояний системы (область его определения может иметь ограничения);
- универсальным или обладать полнотой - способностью всесторонне характеризовать объект;
- с конкретным физическим смыслом (по возможности);
- простым и легко вычисляемым.
Требование физического смысла связано с последующей интерпретацией результатов экспериментов. Легко понять термины "наибольшая производительность" или "точность". Но когда для параметров выхода не выполняется требование статистической эффективности (например, однородность дисперсий), прибегают к преобразованию выхода.
Например: In у или sin√y и становится неясным, что значит экстремум выхода.
Практически всегда результаты исследования сложных объектов могут быть представлены как задачи с несколькими выходными параметрами. В этом случае можно получить математические модели для каждого параметра выхода, но оптимизировать одновременно несколько функций невозможно.
Из положения можно выйти двумя способами: обосновать отказ от всех выходов, кроме одного, или ввести новый единый обобщенный критерий.
В первом случае можно выбрать одну наиболее важную функцию, исходя из опыта исследователя и целей эксперимента, или воспользоваться данными корреляционного анализа. При этом между всевозможными парами параметров вычисляется коэффициент парной корреляции - мера связи между двумя случайными величинами. Сильная корреляционная связь (более 0,8) при высокой достоверности (обычно 0,95 при числе степеней свободы f = N - 2) позволяет исключить из рассмотрения любой из двух анализируемых параметров как не содержащий дополнительной информации об объекте исследований.
Гораздо перспективнее представляется второй путь - введение обобщенного параметра оптимизации. Для этого необходимо предварительно решить три вопроса:
привести все параметры выхода к сравнимому безразмерному виду,
ввести для всех параметров однотипную шкалу измерений,
выбрать правило объединения нескольких частных откликов в единый обобщенный.
Следует отметить, что единого такого правила в настоящее время не существует.
Рассмотрим несколько вариантов преобразования отклика или введения новой метрики.
Вариант 1.
Каждый отклик поставим в соответствие с единой шкалой, на которой имеется только два значения: 0 - неудовлетворительно (например, брак) и 1 - удовлетворительно (годный продукт). Тогда будем иметь:
[О при у>п;
y=
[1 при у < п,
где п - пороговое значение параметра выхода.
Это достаточно грубый подход.
Вариант 2.
Этот способ носит название метода нормировки. Величины, характеризующие изменение параметра отклика, переведем в относительные единицы, т.е. введем относительную шкалу, в которой отклики будут варьироваться только от 0 до 1.
Например, если "у" изменяется от 5,1 до 17, то будем иметь:
5.1 17
у = 5,1... -17 = — ••• — = 0,3. 1,0. (6.8)
17 17
Вариант 3.
Очень часто экспериментатору из априорной информации известна (хотя бы приблизительно) оптимальная или идеальная величина параметра отклика. Тогда преобразование выхода может быть выполнено в соответствии с выражением
У= ỹ-yопт/yопт где у , уопт - соответственно среднее и оптимальное значения выхода.
Эта величина показывает относительную степень отличия отклика от его оптимального значения.
Чтобы нивелировать знаки, удобнее оперировать квадратом выражения (6.9)
(ỹ-yопт/yопт )2
(6.10)
Остановимся на объединении отдельных параметров выхода в обобщенный показатель.
В первом случае очевидно, что обобщенный отклик, так же как и частные, должен принимать только два значения: 0 и 1, тогда для него можно записать формулы мультипликативного вида:
где Y - обобщенный параметр; yj - частные параметры.
Y =∏yi
или
Y =√∏yi
Во втором и третьем случае обобщенный параметр оптимизации записывается в виде аддитивного выражения
Y=∑ai∙(ỹi-yiопт/yiопт )2
где а, - весовой коэффициент параметра, его мера вклада или степень важности (определяется, например, ранжированием).
Одним из наиболее удобных способов построения обобщенного отклика является обобщенная функция желательности Харринпгона. В ее основе лежит идея преобразования натуральных значений частных параметров выхода в безразмерную шкалу. Это психофизическая шкала, устанавливающая соответствие между физическими (размеры, твердость, себестоимость и т.п.) параметрами и психологическими - субъективной оценкой желательности того или иного значения отклика.
Шкала желательности может быть получена из готовых таблиц или графика функции желательности (рис.6. 2). Интервал изменения функции можно разбивать на любое число частей.
Значение частного отклика переводится в безразмерную шкалу желательности, называется частной желательностью и обозначается
du для u = 1, 2, 3...4.
О - абсолютно неприемлемое значение, 1 - наилучшее значение. Если значение находится в интервале 1>du>0,8 - это очень хорошо, а если в интервале 0,2>du>0 - очень плохо.
Величины 0,63 и 0,37 выбраны из удобства вычислений
0.63≈ 1-1/е
0.37≈1/е
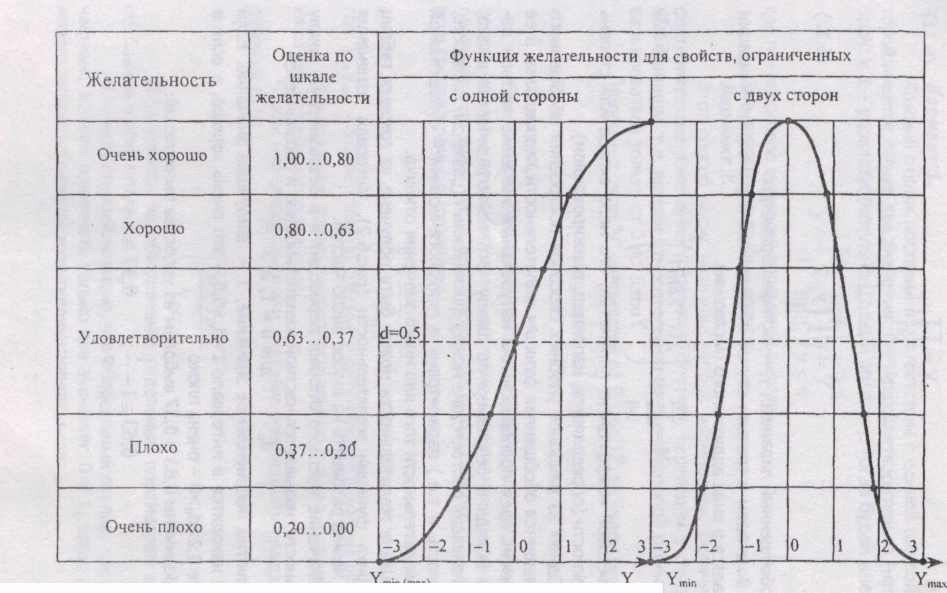
Числа, соответствующие точкам на кривой желательности, при одностороннем ограничении равны:
du=exp[-еxp(-gi)
где gi- значение парамеиров лптимизации по безразмерной шкале, при двустороннем ограничении:
du=exp (-│gi│n
где п-положительное число, связанное со значением ф-ции желательности выражением:
n=lnln1/d 6.14
ln|g│
gi=2∙yi-(ymax+ymin)
ymax-ymin
Рассмотрим формализованную процедуру построения обобщенной функции желательности.
1.Зададимся значениями границ параметра оптимизации у
у min =30 – наихужшее значение полученное в результате экспериментальных исследований
уmax = 70 – наилучшее значение, не обязательно достигнутое в эксперименте.
| Уmin=30 |
| Уmax=70 |
2. Интервал изменения ф-ции желательности (ординату) разобьем на пять отрезков.
| 0.8 |
| -2 |
| -4 |
| 0.37 |
| 0.22 |
| 0.63 |
| -2 |
| -4 |
Рис. 6.4. Применение функции желательности: а - масштабы по осям; б - совмещаемые интервалы
Пример:
-4=а0+а1*30
а0=-10,а1=0.2
4=а0++=а1*70
Если используется неравномерная шкала перевода в безразмерные величины, то формула перехода может иметь вид:
gi=а0+а1*уi+а2*у2i где а0; а1, а2 - параметры формулы перехода.
Если принятое в нашем примере идеальное значение параметра оптимизации "У1, равное 70, практически недостижимо, то удовлетворимся меньшим, но достижимым. Например, 55, тогда
g = -10 + 0,2*55 = 1.
2. Найдем частную функцию желательности по графику
(см.рис.6.4,а) или по формуле (6.14), считая ограничение выбранного
параметра односторонним.
di = ехр[-ехр(-1)] = 0,69.
3. Находим обобщенную функцию желательности по формуле
(6.12) для всех "п" частных функций желательности.
D=n√d1∙∏di=n√0.69∙∏di
Это среднее геометрическое частных желательносгей. В заключение отметим свойства обобщенной функции желательности, полученной по рассмотренной схеме:
приводит к нулю обобщенную функцию;
равенство обобщенной функции единице достигается только
при наилучших значениях всех частных параметров оптимизации.
Планы полнофакторных экспериментов
В настоящее время отсутствует единая всеобъемлющая теория эксперимента. Выбор того или иного оптимального плана основывается в значительной степени на опыте исследователя и логике исследований. Математическая теория эксперимента не дает однозначно оптимальных решений.
В зависимости от задач исследований свойств объекта, выполнения математических ограничений и т.п. можно выбрать тот или иной класс планов - стратегию научного поиска.
Одна из классификаций планов выглядит следующим образом:
планы дисперсионного анализа;
планы отсеивающего эксперимента;
планы многофакторного анализа;
планы для изучения поверхности отклика;
планы для динамических задач;
планы для изучения механизма явлений;
планы для построения диаграмм состав - свойство.
По методу анализа и виду математической модели все планы можно .разбить на три группы: планы дисперсионного, регрессионного и ковариационного анализа.
По числу уровней переменных факторов планы бывают 2х-, 3х- и более уровневые. Кроме того, различают планы- первого порядка для построения линейных моделей, второго - для квадратичных моделей и планы высших порядков. В настоящее время наиболее освоены и распространены симметричные двухуровневые планы типа 2k, где k - число факторов. Эти планы имеют одновременно все критерии оптимальности.
Планы изображаются в виде матриц планирования - таблиц, где наибольшее значение фактора обозначено '+", а наименьшее "-"
Каждый столбец в матрице планирования называется вектор-столбцом, а строка - вектор-строкой.
Логика построения матриц планирования двухуровневых полнофакторных экспериментов очевидна: необходимо повторить предыдущий план на наименьшем и наибольшем уровнях добавляемого исследуемого фактора.
Выбор модели и ее исследование
При планировании и реализации экспериментов вид поверхности отклика и описывающей ее функции, как правило, неизвестен. Поэтому реальная функция отклика аппроксимируется алгебраическим полиномом, полученным при разложении неизвестной функции отклика в ряд Тейлора в окрестности любой точки из области определения этой функции в факторном пространстве. Тогда:
k k
у = f(x j) = Ь0 + ∑b j - x j + ∑ bj • x j – X1, j ≠ 1,
где b - коэффициенты; x - факторы.
По результатам экспериментальных исследований коэффициенты регрессионной модели определяются методом наименьших квадратов - регрессионным анализом. Модель всегда линейна относительно коэффициентов (не переменных факторов).
При однофакторных экспериментах модель может быть интерпретирована геометрически в виде кривой на плоскости; при двух факторах - это поверхность в пространстве; при трех и более факторах модель может быть представлена только отдельными ее сечениями
Оценка коэффициентов модели должна быть состоятельной, несмещенной, эффективной и достаточной. Рассмотрим это подробнее.
Оценка состоятельна, если при увеличении объема выборки она приближается к истинной величине; не смещена, если ее математическое ожидание равно оцениваемому коэффициенту; эффективна, т.е. имеет минимальную дисперсию, и достаточна, если включает максимум информации о коэффициенте.
При постановке оптимизационных задач для движения по поверхности отклика к экстремуму необходимое направление может быть выбрано по линейной модели. В этом случае экстремум достигается пошаговым приближением экспериментов к зоне оптимума.
Если зона экстремума априорно известна, и необходимо выяснить, например, допустимый разброс переменных факторов, то используют метод перевала. При этом всю зону факторного пространства дробят на два блока: до и после экстремума. В каждом блоке ставят отдельный факторный эксперимент и получают две линейные модели.
Надежное предсказание поведения исследуемого объекта при помощи модели возможно только при ее адекватности. Модель адекватна, если ее погрешность не превышает погрешности экспериментов, на основании которых она получена.
Следует отметить, что интерполяционные модели удобнее выражать через натуральные значения факторов, а оптимизационные -через кодовые. Исследование полученных моделей также удобнее выполнять в кодовых переменных.
Рассмотрим процедуру канонического анализа математической модели в виде полинома второго порядка. Задача сводится к преобразованию квадратичного полинома к выражению канонического вида
y-ys=∑Aij∙Zj2 (6.25)
где у - текущее значение параметра оптимизации; ys - значение в новых координатах; Аij - коэффициенты уравнения регрессии канонического вида при квадратичных членах; Zj - новые оси координат (смещенные в новый центр и повернутые относительно старых осей).
Формализованная процедура приведения модели к каноническому виду включает нижеследующие этапы.
Пусть нам дано исходное уравнение
у = Ь0 + Ь1 • X1+ Ь2 • х2 + Ь12 • X1• х2 + ь11 ' Х12 + Ь22 ' Х22
Пример:
у = 20-10-х1-15-х2+4-х *х2 +6-x12 +4-Х22.
Найти частные производные исходного уравнения по факторам и приравнять их нулю.
∂y/∂x1= b1 +Ь12*х2+ 2-b11 *x1 =0 6.27
∂y/∂x2= b2 +Ь12*х2+ 2*b22 *x2 =0
Пример
∂y/∂x1=-10+4*х2+12х1=0
∂y/∂x2=-15+4*х1+8*х2=0
2. Решить систему (6.27) и найти координаты экстремальной точки xls и x2S. Пример: Вычисляем определитель системы:
∆=│12 4│ =96-16 = 80.
4 8
Определитель не равен нулю, следовательно, - исследуемая поверхность имеет центр, т.е. является центральной. Находим координаты центра S:
Х1s= │ 10 4│ х2 s = │12 10│
15 8 =0.25 4 15 =20/80=1.75
3. Найти величину параметра оптимизации, подставив xis и x2S в уравнение (6.26):
ys = Ь0 + br x1s + Ь2 • x2S + Ь12 • xls • x2S + b11 * x1s 2+ b12 • x22S (6.28)
Пример:
ys=20-10*0.25-15*l,75 +4*0.15*1.75+6*0.252+4*1.752=4.625
ys ----'
4. Выполнить параллельный перенос начала координат в точку S для избавления от линейных членов. Тогда уравнение примет вид
У - YS = ь12 • (xl - xis)* (X2 - X2s) +
+ b11•(x1 - X1S)2 + b22 * (x2 - X2S)2
или после замены переменных: х'1=х1-х1s х'2=х2-х2s
получим
у-уs=ь12х'1*х'2+ь11*х'12+ь22*х'2
Пример:
у - 4.625 = 4 • X'1 • Х'2 + 6 • х'12 + 4 • х'22 .
5. Выполнить поворот координат на угол а для избавления от членов смешанных взаимодействий. Этот угол определяется из выражения
ctq2α=ь11-ь22/ь12 (631)
При этом новые координаты будут связаны со старыми следующими соотношениями:
zj = X' • cosα +х'2 - sin α ; z2 = -x1' • sin α+ х'2 • cosa . (6.32)
В итоге будет получено уравнение в канонической форме вида (6.25). Пример:
Для определения коэффициентов А11 А22 решаем следующее характеристическое уравнение:

А11 = 5 +√5 = 7,236; A22 = 5 - √5 = 2,764 . 6. Выполнить проверку.
Сумма коэффициентов при квадратичных членах в исходном уравнении (6,26) и в конечном (6.25) должны быть равны.
∑bii=∑Aii
Пример:
∑bii=6+4=10
∑Aii=7,236 + 2,764 =10
7. Записать уравнение в канонической форме: у - 4,625 = 7,236 • Z 12 + 2,764 – Z22 .
Геометрическая интерпретация канонического преобразования уравнения поверхности отклика представлена на рис. 6.6.
Следует отметить, что при числе факторов k > 3 канонические преобразования усложняются, и в этих случаях целесообразно использовать методы матричной алгебры.

№ 59 « Методика планирования и обработка результатов экспериментов по латинским квадратам»
Комбинированные взаимноортогональные квадраты
Этот метод является одним из способов планирования однофакторных экспериментов с ограничением на рандомизацию.
Исторические истоки метода восходят к числовым комбинаторным задачам. Так, Л. Эйлером в 1779 году рассматривалась задача о возможности построения 36 офицеров в каре так, чтобы в каждом ряду и
| А | В | С | D |
| В | С | D | А |
| С | D | А | В |
| D | А | В | С |
в каждой шеренге было бы по одному офицеру каждого полка и каждого чина. Эйлер предположил невозможность такого строя.
| Рис. 5.2. Латинский квадрат 4x4 |

|
Исходной для построения плана является квадратная таблица, содержащая «N» строк и «n» элементов, в которой любой из элементов встречается в каждой строчке и в каждом столбце один и только один раз. Латинским квадрат называют в связи с тем, что комбинации элементов внутри него обозначают буквами латинского алфавита (рис. 5.2). Два латинских квадрата (рис.5.3,а,б) ортогональны, если при наложении одного квадрата на другой каждая пара элементов встречается в таблице только один раз (рис.5.3,в).
Перестановка строк, столбцов или буквенных символов преобразует любой латинский квадрат в новый. Для квадрата 2x2 возможны два варианта (рис.5.4), 3x3 - 12 вариантов, 4x4 - 576, 5x5 - 161280.
| А | В | В | А | |
| В | А | А | В |
Рис.5.4
Для некоторых (не всех) латинских квадратов можно построить второй квадрат, ортогональный первому. То есть каждая буква этого нового квадрата встречается не только один раз в каждой строке и один раз в каждом столбце, но также один раз с каждой буквой латинского квадрата. Это ортогональные квадраты более высокого порядка, греко-латинские
(рис. 5.5). Пример их использования понятен из следующего примера. Пусть I-V - варианты технологического процесса, 1-5 - тип детали, А-Д - способ контроля, а альфа и бетта - чувствительность прибора. Здесь одновременно будут исследованы два множества: способ контроля и чувствительность прибора.
Всю массу различных экспериментов Ф. Анскомб (1948 г.) условно разделил на две группы:
-оценивание величин констант;
- сравнительные эксперименты.
Комбинаторика латинских квадратов используется чаще всего для экспериментов сравнительного типа.
Описанный метод планирования экспериментов при исследовании влияния данного фактора на изучаемый объект обеспечивает гарантированное усреднение влияния всех остальных факторов. Кроме того, этот метод позволяет сократить общее количество опытов в п m-2 раз. Здесь m- число переменных факторов, а п-количество уровней каждого фактора.
Как и в предыдущем случае, существенна роль рандомизации – искусственное превращение систематических ошибок в случайные. Это достигается построением последовательности проведения отдельных опытов по таблицам случайных чисел.
Ограничение на рандомизацию заключается в том, что экспериментатор на основании априорно информации об источниках неоднородности четко формулирует требования к плану эксперимента, полностью исключающие источники неоднородности различных типов (дискретные и непрерывные). Латинский квадрат является расположением элементов, позволяющих учитывать два множества блоковых ограничений (строки и столбцы), которые должны быть использованы одновременно. Достоинством планирования экспериментов по латинским квадратам в сравнении с классическим являются:
- сокращение количества экспериментов
- возможность исследования многофакторных систем.
К недостаткам можно отнести:
- отсутствие статистически обоснованных результатов ( выход зависит от неконтролируемых факторов)
-ограниченная область применимости (невозможно построить ортогональные квадраты 6х6)
-несовершенство методов построения эмпирических моделей.
Методика эксперимента по латинским квадратам:
| II III IV V |
| Aβ | Eγ | Dα | Сδ | Bε |
| Сα | dε | Аγ | Bβ | Еδ |
| Bγ | Аδ | се | Еα | Dβ |
| Еε | Cβ | Вδ | Dy | Аα |
| Dδ | Вα | Еβ | Аε | cy |
Рис. 5.5. Греко-латинский
1. Задаёмся параметром выхода-исследуемого объекта
У - параметр выхода,
2. выбираем количество переменных факторов, влияющих на выход.
m = 4 (а, Ь, с, d).
3. Задаем число уровней каждого фактора
П=3
4. Строим вспомогательную таблицу - большой комбинационный квадрат с количеством всех возможных комбинаций опытов З4 = 81, т.е. имеется 81 клетка - потенциальный опыт.
Это число можно сократить в З4-2 = 9 раз, и количество опытов будет равно 9 (рис.5.6).
| а | ||||||||||
| с | db | |||||||||
| 1 . | ||||||||||
Рис.5.6.Большой комбинационный квадрат
5. Строим план эксперимента.
Используем способ, заключающийся в размещении диагональных клеток отдельного среднего квадрата в столбцах и строках большого комбинационного квадрата.
5.1. Строим средний квадрат и нумеруем его клетки слева направо, сверху вниз.
5.2. Достраиваем его над диагональным рядом сверху (2; 4) и поддиагональным
5.3. Считываем последовательно диагональные ряды, как пока
зано на схеме:
1-й ряд - средняя диагональ сверху вниз, слева направо - 1, 5, 9;
2-й ряд - средняя диагональ снизу вверх - 7, 5, 3;
3-й ряд - под диагональю сверху вниз - 2, 7, 6;
4-й ряд - над диагональю сверху вниз - 4, 3, 8.
5.4. Заносим ряды цифр в большой комбинационный квадрат
(рис.5.7) в следующем порядке:
1-й ряд - в средний (второй) столбец сверху вниз;
2-й ряд - в среднюю (вторую) строку слева направо;
3-й ряд - в левый (крайний) столбец снизу вверх;
4-й ряд -в правый (крайний) столбец снизу вверх.
| а | ||||||||||
| с | d b | |||||||||
Рис.5.7. Вариант заполнения комбинационного квадрата
Причём, каждая цифра ставится в ту клетку одного среднего квадрата, номер которой соответствует этой цифре (нумерация клеток в подпункте 5.1). При этом в каждом столбце и в каждой строке большого квадрата должна быть только одна занятая клетка.
5.5 Выполняем проверку на независимость изменения факторов.
| а = 1 | а = 2 | а = 3 |
| b 3,1,2 | 1,2,3 | 2,3,1 |
| c1, 2,3 | 1,2,3 | 1, 2,3 |
| d 2, 3J, | 1,2,3 | 3, 1,2 |
| с= 1 | с= 2 | с = 3 |
| a1,2,3 | 1,2,3 | 1,2,3 |
| b3,1,2 | 1,2,3 | 2,3,1 |
| d2,1,3 | 3,2,1 | 1,3,2 |
Недостатком построенного комбинационного квадрата является монотонное изменение уровней нескольких факторов (для ряда частей квадрата), приводящее к утрате независимости изменения факторов.
| с | ||||||||||
| 6) |
5.6 Преобразуем комбинационный квадрат.
5.6.1. Переставим 1-ю и 3-ю строки (по с), рис.5.8,а.
5.6.2. Переставим 1-й и 3-й столбцы (по а), рис.5.8,6.
| а | ||||||||||
| с | ||||||||||
| . 7 | ||||||||||
а)
Рис.5.8. Преобразованный комбинационный квадрат
5.6.3. Выполним проверку.
| с= 1 | с= 2 | с = 3 |
| a1,2,3 | 1,2,3 | 1,2,3 |
| B1,3,2 | 3,2,1 | 2,3,1 |
| d2,3,1 | 1,2,3 | 1,3,2 |
| а = 1 | а = 2 | а = 3 |
| B 1,3,2 b1,3,2 | 3,2,1 | 2,1,3 |
| c1, 2,3 | 1,2,3 | 1, 2,3 |
| d2,1,3 | 3,2,1 | 1,3,2 |
Получим удовлетворительный план в виде заштрихованных клеток комбинационного квадрата, рис.5.9.
| с | ||||||||||
| 6) |
Рис.5.9. План эксперимента *
При этом для каждого значения одного фактора значения других встречаются одинаково часто. Например:
B= 1,3,2 В=3,2,1
Для а=1 с= 1,2,3 для а=2 с=1.2,3
D= 2,1,3 d= 3.2,1
Поэтому при определении зависимости выхода от фактора «а» в виде
у = f(a) влияние факторов «Ь», «с», «d» усредняется.
5.7 Строим матрицу планирования, выписывая условия эксперимента (уровни всех факторов) из большого квадрата по строкам или
столбцам, и реализуем эксперимент (табл.5.2).
Таблица 5.2
Матрица плана эксперимента
| № | Уровни факторов | Выход | |||
| п/п | а | b | с | d | У. |
| Y1 | |||||
| У2 | |||||
| Уз | |||||
| У4 | |||||
| у5 | |||||
| У6 | |||||
| У7 | |||||
| У8 | |||||
| У9 |
6. Обрабатываем результаты эксперимента.
6.1. Группируем результаты по значениям каждого фактора
. (табл.5.3).
При п = 3 каждому значению любого фактора будет соответствовать три значения выхода. При заполнении таблиц следует обращать внимание только на уровни тех факторов, которые есть в таблицах.
Таблица 5.3
Группировка выхода по факторам
| а | ||||
| b | средн. | |||
| у1 | У8 | У666б | У1b | |
| У7 | У5 | У3 | У2b | |
| У4 | У2 | У9 | У3b | |
| сред. | У4a | У2а | У3a |
| с | ||||
| d | средн. | |||
| У3 | У4 | У8 | Y1d | |
| у1 | У5 | У9 | У2d | |
| У22 | Уб | У7 | УЗd | |
| сред. | У1cС | У2с | У3с |
.2. Строим графики эмпирических зависимостей: ордината -средние выходы по фактору; абсцисса - уровни фактора (рис.5.10).
| ўia |
| a |
| ўib |
Рис. 5. 10. Координаты графиков выхода
6.3. Аппроксимируем полученные зависимости методом наименьших квадратов. Получаем частные эмпирические модели:
ўа=f1(а); ўb=f2(b); ўc=f3(c); ўd=f4(d)
6.4. Строим общую многофакторную модель, перемножая частные модели после их представления в безразмерном виде.
В настоящем разделе представлены наиболее простые схемы планирования экспериментов, что и является их самым главным преимуществом.
Вопрос № 60 «Градиентный метод оптимизации»
Исследователями Кифером и Вольфовичем (США) был предложен градиентный метод оптимизации, предназначенный для шагового движении к экстремуму поверхности отклика в задачах оптимизации.
Градиент функции представляет собой вектор, показывающий наискорейшее изменение функции, величина и направление которого определяются по формуле
grad y=∂y/∂x1*î+∂y/∂x2*ĵ+..+∂y/∂xk*ќ
где у - выход эксперимента; xk - переменные факторы; i , j , k - единичные векторы по соответствующим координатам.
Наиболее просто значение производной может быть оценено как отношение приращения функции к приращению отдельных факторов при реализации двух экспериментов, поставленных в окрестностях исходной точки факторного пространства: пробного и рабочего опытов, например, в направлении фактора Xi. Тогда
∂y/∂1=∆y/∆x1|
Ставя, последовательно несколько опытов вокруг пробной точки, определяют составляющие градиента по осям факторного пространства,' т.е. направление движения к оптимуму. Кроме того, задаются величиной рабочего шага при этом движении.
Xh+1=Xh+Ph(∆y//∆x1+∆y/∆x2+...+∆y/∆xh)
где Р - параметр рабочего шага; h - номер шага.
Геометрическая интерпретация движения к оптимуму методом градиента представлена на рис. 6.7.

|
| Рис.6.7. Схема движения к оптимуму методом градиента (цифры на точках номера опытов) |
Из целого ряда градиентных методов наиболее широкое применение получил метод "крутого восхождения", предложенный Боксом и Уилсоном в 1951 году. Этот метод определяет стратегию последовательного пошагового проведения экспериментов, при котором весь цикл исследований разбивается на отдельные этапы. Причем на каждом последующем этапе используются результаты предыдущего.
Согласно теореме Тейлора о разложении аналитической функции в ряд, частные производные функции по факторам равны по величине и знаку соответствующим коэффициентам линейного уравнения регрессии.
Следовательно,
grad у = b1 • i + Ь2 * j + • • • + bk • k
bi=∂y/∂xi
Рассмотрим формализованную процедуру крутого восхождения с численным примером.
В начале необходимо иметь линейную модель, построенную по результатам эксперимента, и знать интервалы варьирования и нулевой уровень факторов.
Дано: адекватная линейная модель в кодовых переменных:
h = 41 + 10х1+ 6х2 - 5х3 - 4х4 .
Известно, что х4 является качественным фактором (например, конструкцией узла) и наилучшие результаты дает конструкция с кодовым значением «-1". При крутом восхождении это значение качественного фактора фиксируется и модель приобретает вид h = 45 + 10х1 + 6х2 - Зх3 .
Если оба уровня качественного фактора дают близкие результаты, то крутое восхождение повторяется на двух уровнях. Интервалы варьирования факторов в натуральных переменных:
∆Х1 = ±0,15; ∆х2 = ±100; ∆х3 = ±50;
нулевой уровень факторов:
Хо,1 = 0,4; х0,2 = 840; х0,3 = 60.
1. Выбор базового фактора.
В качестве базового рекомендуется выбирать фактор с наибольшей абсолютной величиной коэффициента линейной модели или фактор с наибольшим интервалом варьирования. Пример.
Выбираем в качестве базового фактор х2/ так как
|b1| > |Ь2| > |Ь3| и Ах2 > ∆х3 > ∆X1
2. Выбор шага базисного фактора.
Величины шагов движения по факторным осям должны быть больше ошибки, с которой фиксируется фактор. Малый шаг увеличивает количество опытов, а слишком большой - может привести к проскоку экстремума.
Обычно шаг Pj выбирают в долях и интервала варьирования фактора:
Pj=μ*∆xj
где 0 < μ < 1.
Пример.
Р6 = Р2 = 0,2-100 = 20.
3. Расчет шагов для остальных факторов выполняем по формуле
где индекс "6" относится к базовому фактору.
Пример.
Pj=P6*(bj*∆Xj/b6*∆X6
Где индекс 6 относится к базовому фактору.
Пример
P1=20*(10*0.15/6*100)=0.15 P3=20*(-3)*50/6*100=-5
При необходимости шаги можно для удобства счета округлять.
4. Выбор начала движения по градиенту.
За начало движения по градиенту функции отклика можно брать любую точку поверхности отклика. Обычно используют центр эксперимента (основной или нулевой уровень каждого фактора). Но если есть предположение о наличии экстремума в некоторой точке, то эту точку нужно брать в вилку.
Пример: в качестве начала движения выбираем основной уровень.
5. Расчет величин факторов для первого шага:
Xj=Xjo+n*Pj
где n - порядковый номер шага.
Пример. X1 = 0,4 + 1*0,05 = 0,45; х2 = 840 + 1*20 = 860; х3 = 60 + 1*(-5) = 55.
6. Перевод натуральных значений факторов для первого шага
движения в кодовые.
Xj=(Xj-Xjo)/∆Xj
где Xj - натуральное значение фактора.
Пример.
X1=(0.45-04)/0.15=0,33 X2=(860-840)/100=0.2 X3=(55-60)/50=-0.1
7. Расчет выходе в первом мысленном опыте,
Пример,
у9 =
Дата добавления: 2015-04-18; просмотров: 90; Мы поможем в написании вашей работы!; Нарушение авторских прав |