КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Системный подход к решению задачи управления движением при формообразовании.
Цель системного подхода – наилучшим образом довести решение задачи управления движением ИМ до практически приемлемого результата.
Для этого задачу управления движением ИМ следует представить как множество более простых, логически связанных между собой подзадач. Каждая подзадача при этом должна нести определенную смысловую нагрузку, т. е. должна быть физически интерпретируема. В этом случае, как показывает опыт, разработка системы управления движением в целом значительно упрощается. Применяя системный подход, вместо системы (рис. 2.1) получим совокупность задач (рис. 2.3).
Часть задач, представленных на рис. 2.3, слабо зависят от свойств ИМ и могут решаться без детального их изучения. В этом – еще одно преимущество системного подхода.

Задачи, слабо зависящие от свойств ИМ, следующие:
- задача интерпретации;
- построение траектории;
- задача разгона и торможения.
4. Задача интерпретации текста кадра управляющей программы: постановка и основные определения.
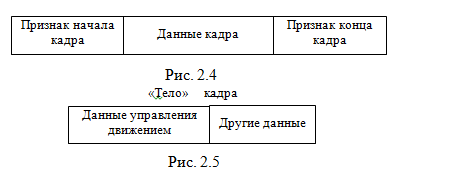
Поставим задачу интерпретации, использующую 2 прохода по символьной конструкции. Фрагмент обрабатываемого интерпретатором символьного текста называется кадром. Наиболее общий формат кадра представлен на рис. 2.4.
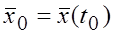
 Таким образом, кадр есть некоторая синтаксическая конструкция, данные которой используются исполнительной системой одновременно (отсюда и название – кадр). Данные, заключенные в кадре и представляющие собой его «тело», весьма разнообразны. Разделим все данные на две группы: данные управления движением и другие данные (рис. 2.5).
Таким образом, кадр есть некоторая синтаксическая конструкция, данные которой используются исполнительной системой одновременно (отсюда и название – кадр). Данные, заключенные в кадре и представляющие собой его «тело», весьма разнообразны. Разделим все данные на две группы: данные управления движением и другие данные (рис. 2.5).
К данным управления движением относится вся информация, описывающая характер движения: систему координат, в которой происходит движение, тип траектории, свойства кинематической схемы, разгон и торможение, позиционирование и т. д.
К другим данным относятся:
- операции ввода/вывода;
- операции логической и арифметической обработки данных;
- операции условных и безусловных переходов;
- операции обработки циклов;
- операции вызова подпрограмм;
- другие операции.
Из этого следует, что, хотя в каждый момент времени исполняется только один кадр, интерпретатор в некоторых случаях (обработка циклов, вызов подпрограмм, разгон и торможение, условные переходы и некоторые другие операции) должен «просматривать» несколько кадров по ходу выполнения управляющей программы.
Таким образом, дана последовательность кадров, объединенная управляющей программой на некотором входном языке.
Требуется:
– выполнить синтаксический анализ текста текущего кадра УП;
– провести семантический анализ текста этого кадра;
– подготовить данные для работы исполнительной системы.
6. Задача построения программной траектории при формообразовании: постановка задачи. Классификация методов построения программных траекторий.
Программная траектория строится в 2 этапа. Первый этап предусматривает планирование траектории и реализуется в интерпретаторе. Второй этап – исполнение действий, намеченных при планировании, – реализуется в исполнительной системе.
Задача построения программной траектории ставится следующим образом.
Даны:
- начальные и конечные условия (в пределах допустимой погрешности):
 ,
,  , t – время;
, t – время;
- математическое описание (математическая модель) программной траектории;
- допустимая статическая погрешность построения траектории.
Требуется построить алгоритм формирования траектории положения и ориентации инструмента по исходным данным.
Методы построения программных траекторий можно разделить на 2 класса: аналитические и интерполяционные.

В классе аналитических методов для построения траектории служат аналитические выражения (формулы). В классе интерполяционных методов формулы играют вспомогательную роль. Они служат для создания интерполяционного процесса, т. е. процесса восстановления данных внутри некоторой области по известным данным на ее границах (обратный процесс – экстраполяция: восстановление данных вне некоторой области по значениям данных внутри нее). Основой для интерполяционных методов являются данные (множество точек, векторов и т. д.), полученные, например, опытным путем. Иногда для исключения случайных выбросов данных они подвергаются предварительной обработке – аппроксимации (сглаживанию).
В классе аналитических методов (рис. 2.8) имеются методы построения траекторий по их конечно-разностным схемам и методы построения непосредственно по аналитическому выражению траектории.
Конечно-разностная схема (КРС) – это дискретный аналог дифференциального уравнения и в пределе сводится к нему. КРС представления траектории может быть точной и приближенной. В случае точной КРС все точки строящейся по ней траектории находятся на ее идеализированном прототипе и погрешность определяется только значениями конечных разностей. В случае приближенной КРС ни одна точка (кроме начальной) в общем случае не будет находиться на идеализированном прототипе, а в погрешности построения траектории появляется дополнительная составляющая, которая в отдельных случаях может монотонно возрастать со временем, разрушая алгоритм. Приближенные методы обычно формируются разложением дифференциального уравнения траектории в ряд по степеням с возможным дальнейшим усреднением в пределах конечной разности (методы Рунге–Кутта). Это – одношаговые методы (рис. 2.8). Многошаговые методы (интерполяционная процедура на каждом шаге) редко применяются при построении программных траекторий.
Таким образом, предпочтительной для построения траекторий методом КРС является точная КРС.
8. Погрешность при построении программных траекторий: классификация погрешностей, причины возникновения, способы уменьшения погрешности.
Во всякой физической системе присутствуют 3 составляющие полной погрешности: неустранимая DН, методическая DМ и инструментальная DИ.
Если все 3 составляющие малы по сравнению с масштабами изучаемого явления, то для полной погрешности DS справедливо условие (условие аддитивности): DS = DН + DМ + DИ.
Неустранимая погрешность связана с неточностью задания граничных условий и параметров математической модели траектории. Методическаяпогрешность связана с применяемым методом (алгоритмом) расчета траектории и в зависимости от него может меняться в широких пределах. Инструментальная погрешность зависит от используемого инструмента – компьютера и определяется младшим разрядом его виртуальной разрядной сетки.
Современный уровень развития технических средств позволяет пренебречь неустранимой и инструментальной погрешностями при построении программной траектории.
Методическая погрешность (при точных алгоритмах построения траектории) на концах траектории достигает статической погрешности, т. е. определяется точностью представления граничных условий. Внутри промежутка методическая погрешность зависит от шага интегрирования Т и геометрических свойств траектории: первой производной по времени – скорости, второй производной по времени (ускорение, характеристика кривизны), третьей производной по времени (характеристика кручения пространственной траектории).
Методическая погрешность при этом имеет 3 составляющие: угловую (касательную), радиальную (нормальную) и бинормальную. Шаг интегрирования Т нельзя сделать сколь угодно малым: он должен быть не меньше интервала дискретизации системы управления. Последний же, как уже отмечалось, определяется физическими свойствами ИМ как объекта управления. Таким образом, физические свойства ИМ накладывают ограничения на класс реализуемых траекторий.
10. Прямая кинематическая задача: постановка задачи, её назначение, способы решения.
Прямая задача состоит в отыскании вектора положения расчетной точки инструмента и его ориентации в некоторой технологической системе координат по известной кинематической схеме механизма и вектору обобщенных координат q :
q = [q1q2Kqn ]T
Вектор положения и ориентации x в общем случае шестимерный:
xT = [xyzαβγ] ,
где x, y, z – компоненты вектора положения расчетной точки инструмента в
технологической системе координат; a, b, g – какие-либо углы, описываю-
щие ориентацию инструмента в технологической системе координат.
Вектор положения  расчетной точки рабочего органа (инструмента) и его ориентация определяются в некоторой технологической системе координат x0y0z0 матрицей T
расчетной точки рабочего органа (инструмента) и его ориентация определяются в некоторой технологической системе координат x0y0z0 матрицей T

где  ,
,  ,
,  – единичные орты, связанные с концом вектора .
– единичные орты, связанные с концом вектора .
Векторы положения и ориентации инструмента можно также вычислить перемножением матриц преобразований систем координат при переходе от одного звена к другому:
A1 A2 A3 A4 A5 A6 Ap = T6, (2.15)
где Ap – матрица рабочего органа ИМ.
Условно все методы решения прямой задачи можно разбить на три группы.
1. Методы, позволяющие записать нужные соотношения непосредственно из кинематической схемы манипулятора, т. е. из геометрических соображений без использования специальных приемов.
2. Методы, основанные на использовании матричного аппарата, например, матриц преобразования однородных координат размерностью 4?4.
В этом методе вводятся системы координат, связанные с каждым из подвижных звеньев, а также базовые системы, связанные с основанием. Составляются т.н. матрицы перехода от одной системы координат к ближайшей (соседней). Затем перемножают все полученные матрицы перехода, строят результирующую матрицу, связывающую систему координат основания с системой координат любого звена, например захватного устройства.
3. Методы, основанные на использовании понятия вектора конечного поворота или винта конечного перемещения.
Дата добавления: 2015-04-21; просмотров: 121; Мы поможем в написании вашей работы!; Нарушение авторских прав |