КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
АВТОМАТИЗАЦИЯ ВЗВЕШИВАНИЯ ПРОДУКЦИИ
Сыпучие грузы взвешивают на платформенных рычажных и тензометрических ве-сах.
В сельскохозяйственном производстве наиболее распространены стационарные платформенные весы,грузоприемный механизм которых состоит из четырех поперечных рычагов, передающих усилие на коромысло или тягу циферблатного указательного устрой-ства. Некоторые из этих весов могут регистрировать результаты взвешивания. На одной оси со стрелкой циферблатного указателя весов этого типа смонтирован барабан, имеющий 13 кодирующих дорожек. На каждой дорожке барабана в определенном порядке располо-жены отверстия, образующие цифровой код, соответствующий углу поворота стрелки. Две-надцать дорожек образуют код массы, тринадцатая служит для контроля успокоения подвижной системы весов. Считывание кода с барабана осуществляется фотодиодами, распо-ложенными против каждой из дорожек и освещаемыми специальным источником света че-рез отверстия в барабане. Положение, когда фотодиод освещен, соответствует 1, когда не освещен — 0. Таким образом, определенной схемой размещения отверстий на барабане за-писан циклический код чисел десятичной системы от 0 до 1000. Результат взвешивания считывается оператором со шкалы, фиксируется на бумажной ленте и может быть передан на пункт централизованного учета.
Широко распространены весы с тензометрическими силоизмерителями. Платформа таких весов опирается на тензодатчики, преобразующие давление груза в электрический сигнал, который после усиления может быть передан на значительное расстояние.
Переносные тензометрические весы представляют систему из четырех силоизмери-телей, размещаемых на ровной твердой площадке. Весы следует периодически тарировать по эталонному грузу. Если силоизмерительные элементы установлены правильно и отсут-ствуют горизонтальные составляющие усилия, то ошибка измерения не превышает 2 %.
Взвешивание сыпучих грузов в стационарных условиях осуществляется также с по-мощью ленточных весов, представляющих собой одно из звеньев транспортной системы. Таким образом построены системы взвешивания овощей, зерна, корнеклубнеплодов и т.д.
На предприятиях по переработке и хранению зерна применяют ковшовые и автома-тические порционные весы. Ковшовые весы представляют собой обычные рычажные весы порционного действия с емкостью ковша от 5 до 100 кг. Автоматические порционные ве-сы-дозаторы имеют бункер, заполняемый питателем.
Для дозаторов дискретного действия характерна динамическая погрешность, выз-ванная тем, что после отключения питателя в дозатор поступает часть материала, находя-щаяся в воздухе. Именно поэтому перед окончанием цикла питатель переключается на по-ниженную скорость (режим досыпки).
Следует учитывать также динамическую перегрузку, связанную с динамическим усилием падающего материала. В зависимости от способа контроля массы возможно старт-стопное, аналоговое или цифровое управлением ИМ питателей дозаторов.
Старт-стопное управление (рис. 8.11) реализуется с помощью путевых выключате-лей SQ1 и SQ2, фиксирующих положение стрелки в определенных точках циферблатного указателя.
При подаче сигнала «Пуск» двигатель М питателя начинает работать в режиме но-минальной скорости и материал интенсивно заполняет бункер дозатора. Когда укреплен-ный на стрелке циферблатного указателя флажок войдет в паз бесконтактного выключа-

|
|
теля SQ1, вырабатывается сигнал, переводящий двигатель питателя М на пониженную скорость. Теперь интенсивность подачи уменьшается, и точность дозирования увеличи-вается. При входе флажка в паз бесконтактного выключателя SQ2 питатель отключается.
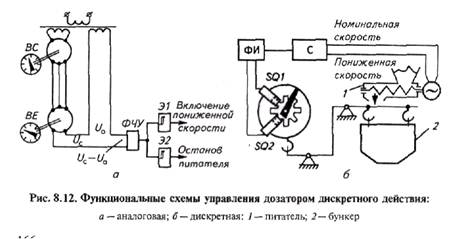
Аналоговое управление(рис. 8.12, а) осуществляется за счет преобразования угла поворота стрелки в аналоговый сигнал. В качестве преобразователя может быть использо-вана пара сельсин-датчик (ВС) — сельсин-приемник (BE), работающая в трансформатор-ном режиме. Требуемая доза задается изменением углового положения ротора сельсина-датчика ВС, а контроль массы материала, поступающего в весовой бункер, — значением разности между выходным напряжением Uc сельсина BE и опорным напряжением Uo, ко-торое повышается фоточувствительным усилителем (ФЧУ) и подается на релейные элемен-ты Э1 и Э2. Релейный элемент Э1 настраивают на перевод питателя в режим пониженной скорости, а Э2— на отключение питателя.
Цифровое управление (рис. 8.12, б) обеспечивается преобразованием угла поворота стрелки в цифровой код. Датчики SQ1 и SQ2 автогенераторного типа с помощью зубчатого диска выдают последовательность импульсов, число которых соответствует углу поворота стрелки. Импульсы поступают сначала в формирователь ФИ, а затем в счетчик С. После отсчета n импульсов питатель 1 переводится на пониженную скорость, а после отсчета еще t импульсов — останавливается.
Преимущества схемы цифрового управления — отсчет импульсов; отсутствие по-грешности в измерениях из-за налипания материала на стенки бункера 2.
Дальнейшее усовершенствование порционных весов — многокомпонентные весо-вые дозаторы, представляющие собой то же весовое устройство, но приспособленное для последовательного взвешивания в одном бункере нескольких компонентов какой-либо сме-си (например, комбикорма).
Дата добавления: 2015-01-15; просмотров: 318; Мы поможем в написании вашей работы!; Нарушение авторских прав |