КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
С использованием ТПЧ
Управление пуском и торможением АД
с использованием ТПЧ
Применение ТПЧ улучшает также другие качественные показатели регулируемого ЭП: прежде всего это относится к пусковым и тормозным режимам АД.
Следует отметить, что пуск АД проводят при уменьшенной частоте и по мере его ускорения частоту тока, подаваемого на статор, увеличивают.
Увеличенный пусковой момент способствует большему ускорению ротора АД и уменьшает время пуска, что очень важно для ЭП работающих в повторно-кратковременном режиме. В последующем для увеличения угловой скорости ротора АД до номинальной частоту тока статора постепенно увеличивают. Если в процессе ускорения вращения ротора частоту увеличивать медленно, то при работе на каждой частотной характеристике АД достигает угловой скорости на ее рабочей части и переход на большую скорость не сопровождается большими бросками тока. Такой частотный пуск называется «мягким». При «мягком» пуске АД потери энергии и потребляемая энергия сравнительно невелики, но увеличивается время пускового процесса. Если же скорость изменения частоты тока статора большая, то ротор АД не успевают достичь скорости, соответствующей критическому скольжению и переход с одной частотной характеристики на другую происходит в области их неустойчивых частей. Такой режим частотного пуска, характерный большими значениями тока и потерь, называют «жестким».
Очевидно, в ТПЧ наиболее рационально устанавливать такую скорость изменения частоты тока, при которой переход с одной частотной механической характеристики на другую будет происходить при максимальных моментах. Указанное условие будет выполняться, когда темп или ускорение частоты тока в статоре будет одинаковым с ускорением ротора.
На судах ТПЧ применяют в основном в реверсивных ЭП для которых характерны режимы торможения противовключением и рекуперативный.
Применение ТПЧ позволяет предварительно понизить частоту тока, подаваемого на статор АД, при этом пропорционально уменьшится индуктивное сопротивление ротора, соs ф увеличится и это приведет к увеличению тормозного момента (соответственно время тормозного процесса сокращается). Одновременно при уменьшении частоты тока мгновенно снижается угловая скорость поля статора и скорость ротора оказывается выше скорости поля статора. Это способствует работе АД на небольшом отрезке времени в режиме рекуперации, что дополнительно сокращает время реверса.
Режим рекуперации может быть не только при реверсе, но и при регулировании угловой скорости в сторону уменьшения, когда приходится снижать частоту тока статора. В подобных случаях, так же как и в предыдущем, переход работы АД с одной механической характеристики на другую происходит в зоне рекуперативного торможения, Переход сопровождается бросками тока, значения которых зависят от скорости изменения частоты. Аналогично, как и при пуске, переходный режим может быть «мягким» и «жестким». Для уменьшения бросков тока и потерь при регулировании стремятся скорость уменьшения частоты иметь небольшую, т.е. переходный процесс выполняют по возможности «мягким». Задавая определенные законы изменения частоты с помощью системы управления ТПЧ, можно получить гамму механических характеристик АД, отвечающих оптимальному режиму работы АД.
2. Регулирование угловой скорости АД с помощью тиристоров
Кроме рассмотренного частотного управления АД, тиристорные схемы позволяют изменять угловую скорость АД и другими способами. Регулирование угловой скорости благодаря переключающим способностям тиристоров в этих схемах построено на изменении рабочих параметров АД, которое достигается:
1.изменением напряжения, подаваемого на статор:
2.импульсным регулированием в цепи ротора;
3.введением добавочной ЭДС в цепь ротора.
Изменения напряжения, подаваемого на статор. При изменении напряжения тиристорным регулятором изменяется магнитный поток статора, а это приводит к изменению вращающего момента АД: тем самым нарушается условие равновесия, которым характеризуется установившееся движение. В случае уменьшения напряжения вращающий момент становится меньше момента сопротивления и ротор АД будет замедляться. Уменьшение скорости приводит к увеличению скольжения, ЭДС, тока ротора и вращающего момента, Когда при замедлении наступит равновесие моментов, то ротор АД будет вращаться с новой установившейся скоростью, которая будет меньше, чем до снижения напряжения на зажимах статора.
Применение тиристорных регуляторов напряжения позволяет осуществлять плавный пуск АД путем постепенного уменьшения угла α, а также динамическое торможение.
Устройство регуляторов напряжения значительно проще и дешевле описанных ранее схем ТПЧ. Однако КПД двигателей с регуляторами напряжения невысок, поэтому приходится увеличивать габаритные размеры АД во избежание превышения допустимой температуры вследствие роста тока и ухудшения вентиляции.
На судах тиристорные регуляторы напряжения используются в ЭП кранов и лебедок, где большие моменты при малых угловых скоростях требуются лишь в течение небольшой части рабочего цикла.
Импульсное регулирование в цепи ротора. Сущность импульсного регулирования состоит в том. что для изменения угловой скорости АД осуществляется периодическое кратковременное изменение его параметров, благодаря чему дозируется поток энергии, передаваемой от сети к АД и в обратном направлении.
Следует отметить, что вследствие небольшого значения мощности, необходимой для управления тиристорным ключом, данный способ позволяет получить бесступенчатое плавное изменение угловой скорости. Механические характеристики АД при данном способе регулирования можно получить более жесткими по сравнению с реостатными, так как при изменении нагрузки на валу АД имеется возможность изменять управляющий сигнал таким образом, чтобы скорость практически не менялась.
Введение добавочной ЭДС в цепь ротора. Путем подключения к цепи ротора АД независимого источника энергии переменная ЭДС этого источника подается в противофазе с ЭДС ротора.
Способ регулирования введением добавочной ЭДС связан с преобразованием энергии постоянного тока в переменный или наоборот, поэтому указанные схемы имеют пониженные значения коэффициента мощности и КПД. Такой способ регулирования наиболее целесообразен лишь при небольшом диапазоне регулирования скорости ЭП, что в условиях судна применимо для отдельных насосов,
3. Регулирование скорости в системе двойного рода тока ( УВП – Д )
В таких системах исполнительный двигатель постоянного тока получает питание от судовой сети через управляемый вентильный преобразователь ВП ( рис. 9.5 ).
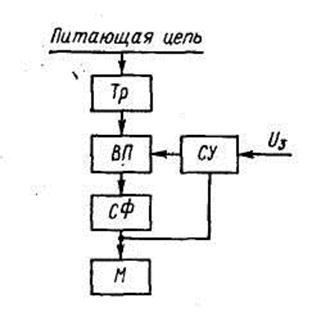
Рис. 9.5. Структурная схема тиристорного электропривода постоянного тока
В качестве вентилей используются управляемые полупроводниковые диоды – тиристоры.
В общем случае такой электропривод состоит из следующих основных элементов:
1. силовой трансформатор Тр;
2. вентильный преобразователь ВП;
3. сглаживающий фильтр СФ;
4. электродвигатель М;
5. система управления СУ.
Силовой трансформатор Тр служит для согласования номинального напряжения двигателя с выходным напряжением преобразователя.
Вентильный преобразователь выпрямляет напряжение и регулирует его в нужных пределах. Для питания цепей якоря двигателя применяют однополупериодные схемы с нулевым выводом ( рис. 9.6, а ) или двухполупериодные мостовые схемы ( рис.9.6., б ).
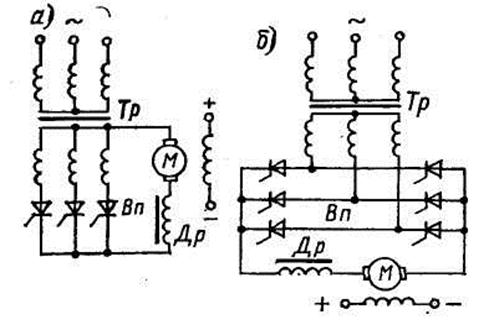
Рис. 9.6. Схемы включения якоря двигателей постоянного тока на вентильный преобразователь: с нулевым выводом ( а ); мостовая ( б )
В таких схемах обмотки возбуждения двигателей обычно получают питание от общей сети переменного тока через маломощные однофазные выпрямители.
Сглаживающий фильтр ( дроссель Др на рис.9.6 ) предназначен для уменьшения пульсаций выпрямленного напряжения. При этом улучшаются условия коммутации и уменьшается нагрев обмотки якоря двигателя.
Система управления СУ изменяет угол отпирания тиристоров α. Вследствие чего изменяется выпрямленное напряжение на якоре исполнительного двигателя, а значит, и его скорость.
При этом, при малых скоростях якоря этот угол близок к 90º, а для разгона якоря СУ непрерывно уменьшает этот угол. При номинальном ( наибольшем ) напряжении на якоре угол α = 0º. 
Механические характеристики двигателя при разных значениях угла отпирания тиристоров α приведены на рис. 9.7.
Они подобны механическим характеристикам исполнительного двигателя в системе Г – Д ( рис. 9.4 ).
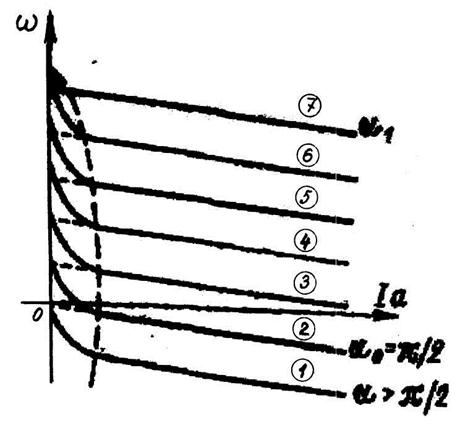
Рис. 9.7. Электромеханические характеристики двигателя при разных значениях угла α
На рис. 9.7 штриховой линией показана граница между режимами непрерывного ( справа от пунктирной линии ) и прерывистого ( слева от этой линии ) токов якоря двигателя.
Электромеханические характеристики имеют такие особенности:
1. при уменьшении угла отпирания тиристоров от α = π / 2 = 90º ( характеристика 2 ) до α  = 0º ( характеристика 7 ) скорость двигателя увеличивается, двигатель работает в двигательном режиме;
= 0º ( характеристика 7 ) скорость двигателя увеличивается, двигатель работает в двигательном режиме;
2. при увеличении угла α свыше 90º ( характеристика 1 ) ток якоря двигателя не изменяет направление, но двигатель реверсирует и переходит в режим тормозного спуска. при котором электромагнитный момент двигателя, направленный на подъем, ограничивает скорость спуска тяжелого груза или судового якоря с якорь-цепью.
Лекция № 8
« Аварийные режимы работы и защита полупроводниковых преобразователей»
В процессе эксплуатации полупроводниковых преобразователей возможно возникновение аварийных режимов. Аварийные режимы ПП, в зависимости от места повреждения, разделяют на внешние и внутренние.
К внутренним относятся режимы, возникающие при повреждении полупроводниковых вентилей в одном или нескольких плечах силовой схемы вследствие теплового или электрического пробоя.
Внешние аварийные режимы возникают при коротких замыканиях во входной или выходной цепи преобразователя, при перегрузке или коротком замыкании непосредственно у потребителя.
К основным видам аварийных режимов ПП относятся:
- внешние аварии, вызванные КЗ в нагрузке или в распределительной сети;
- внутренние аварии, вызванные отказами полупроводниковых вентилей;
- опрокидывание инвертора (КЗ в цепи постоянного тока через инвертор);
- появление уравнительных токов в реверсивных преобразователях или преобразователях частоты с непосредственной связью.
На рис. 9.12 представлены наиболее часто встречаемые на практике аварийные режимы мостового полупроводникового выпрямителя.
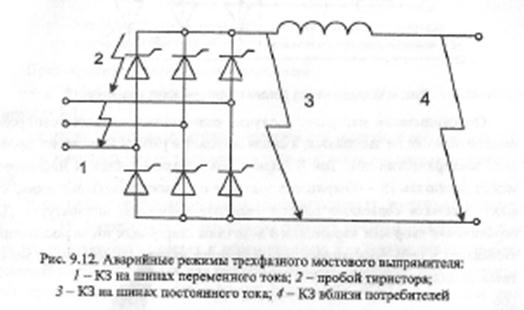
Рис. 9.12. Аварийные режимы трехфазного мостового выпрямителя: 1 - КЗ на шинах переменного тока; 2 - пробой тиристора; 3 - КЗ на шинах постоянного тока; 4 - КЗ вблизи потребителей.
Внутреннее короткое замыкание трехфазного мостового выпрямителя возникает при пробое тиристора одного плеча, причинами которого являются перегрев структуры вентиля при перегрузке по току или пробой обратным напряжением при всплесках напряжения в судовой сети.
В случае внешнего КЗ в нагрузке происходит сравнительно плавное нарастание тока короткого замыкания выпрямителя до установившегося значения.
Причиной аварийных режимов инверторов могут быть нарушения в системе управления (пропуск одного или всех сигналов управления тиристорами), кратковременное снижение напряжения сети переменного тока, увеличение тока и угла коммутации, пробой одного из тиристоров инверторного моста, сбои в системе управления и т.д.
В результате этих нарушений происходит одновременное открывание двух тиристоров в одном плече и протекание тока КЗ через инвертор. Такой аварийный режим называется опрокидывание инвертора (рис. 9.13).
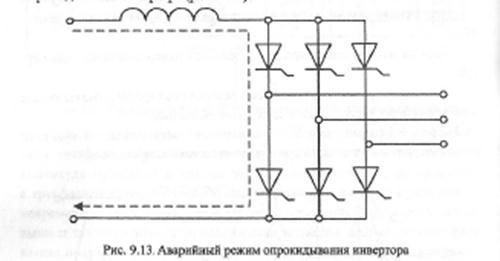
Рис. 9.13. Аварийный режим опрокидывания инвертора
Опрокидывание наступает в случае, если тиристор после токопроводящего периода не запирается, а снова вступает в работу и начинает проводить электрический ток.
Ток КЗ при опрокидывании силовых инверторов может достигать 15 - 40-кратного значения от номинального значения, что может вызвать серьезные повреждения электрической аппаратуры.
Для ограничения скорости нарастания и величины аварийных токов после опрокидывания в цепь постоянного тока инвертора включают реактор со значительной индуктивностью.
Для автономных инверторов характерны те же аварийные режимы, что и для инверторов, ведомых сетью.
В виду чувствительности ПП к всплескам напряжения, токам перегрузки и КЗ, к системам их защиты предъявляются жесткие требования по быстродействию, что не всегда может быть обеспечено традиционной защитно-коммутационной аппаратурой.
На рис. 9.14 приведена принципиальная схема защиты трехфазного мостового полупроводникового выпрямителя с помощью быстродействующих плавких предохранителей.
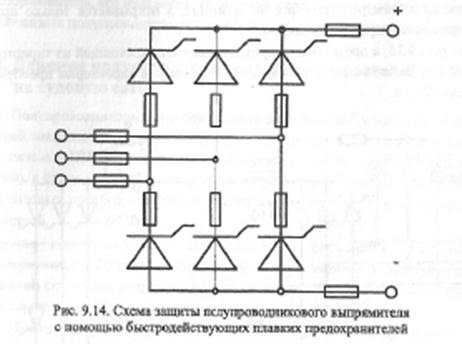
Рис. 9.14. Схема защиты полупроводникового выпрямителя с помощью быстродействующих плавких предохранителей
Предохранители могут быть установлены:
- в фазных проводах переменного тока, обеспечивая отключение внешних КЗ;
- в цепях полупроводниковых вентилей для защиты от внутренних КЗ;
- в выходных цепях постоянного тока и в цепях отдельных потребителей.
В силовых полупроводниковых преобразователях, входящих в состав ВГУ и ГЭУ, запрещается использование плавких предохранителей, так как их перегорание приведет к обесточиванию или потере управляемости судна. В таких установках для защиты полупроводниковых преобразователей применяют быстродействующие автоматические выключатели или
полупроводниковые защитные устройства (тиристорные расцепители или короткозамыкатели).
Тиристорным расцепителем называют защитное устройство выполненное, как правило, на основе одно- или двухоперационных тиристоров.
В нормальных режимах эксплуатации расцепитель, как и автоматические выключатели, проводит электрический ток.
В случае возникновения аварийных режимов по сигналу из системы управления ПП тиристорный расцепитель запирается, и ток начинает проходить через токоограничивающий резистор, который устанавливается параллельно расцепителю.
Короткозамыкатель, в отличие от расцепителя, в нормальных режимах эксплуатации электрический ток не проводит, а открывается только при возникновении аварийных режимов.
На рис. 9.15, а представлен короткозамыкатель, состоящий из тиристоров VD 7-9, подключаемых параллельно к основным тиристорам преобразователя VD 1-3.
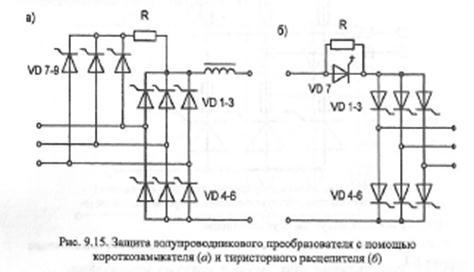
Рис. 9.15. Защита полупроводникового преобразователя с помощью короткозамыкателя (а) и тиристорного расцепителя (б)
При возникновении аварийных режимов тиристоры короткозамыкателя VD 7-9 открываются, а тиристоры преобразователя VD 1-3 запираются.
Аварийные токи начинают протекать через токоограничивающий резистор R, в результате чего достигается их снижение.
Полупроводниковый расцепитель на базе двухоперационного тиристора показан на рис. 9.15, б.
В нормальном режиме эксплуатации тиристор расцепителя VD 7 открыт и проводит электрический ток.
При возникновении КЗ и протекании аварийных токов расцепитель по сигналу из системы управления запирается, и ток протекает через токоограничивающее сопротивление R.
Полупроводниковые устройства быстродействующей бесконтактной защиты используются не только для ликвидации аварийных режимов, но и для бесконтактного отключения и включения ПП в нормальных эксплуатационных режимах. В этом случае традиционная контактная коммутационно-защитная аппаратура используется в качестве резервной.
Способ защиты и выбор схем защитных устройств ПП зависит от вида преобразователя, его мощности, количества параллельно и последовательно включенных полупроводниковых приборов, нагрузки, частоты сети и др.
Дата добавления: 2015-02-09; просмотров: 1344; Мы поможем в написании вашей работы!; Нарушение авторских прав |