КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Общие сведения. Однофазный магнитный усилитель (МУ) представляет собой два идентичных трансформатора, первичные обмотки которых
Однофазный магнитный усилитель (МУ) представляет собой два идентичных трансформатора, первичные обмотки которых, называемые рабочими, соединяются между собой последовательно или параллельно и подключаются к источнику напряжения переменного тока. Нагрузка включается в цепь рабочих обмоток непосредственно или через выпрямительное устройство. Вторичные обмотки, называемые обмотками управления, соединяются последовательно и подключаются к источнику постоянного тока.
Первичные и вторичные обмотки трансформаторов включаются так, чтобы обеспечить насыщение сердечников в разные полупериоды изменения напряжения источника питания.
Принцип работы МУ заключается в том, чго в течение части каждого из полупериодов изменения напряжения источника питания, пока ни один из сердечников не насыщен, ток в нагрузке мал (представляет, по существу, ток холостого хода трансформаторов), и практически все напряжение оказывается приложенным к рабочим обмоткам. В течение остальной части каждого из полупериодов, когда сердечники находятся в насыщении, практически все напряжение источника питания оказывается приложенным к нагрузке.
Благодаря такому периодическому возникновению и исчезновению большого сопротивления последовательно с нагрузкой, МУ работает как ключ, между источником питания и нагрузкой. Момент его замыкания может быть изменен выбором величины намагничивающей силы (НС) обмоток управления.
В отличие от трансформаторов оси обмоток МУ располагаются на схеме перпендикулярно линии сердечника. Выпуклости в графических изображениях рабочих обмоток и обмоток управления направлены взаимно противоположно. Условные начала обмоток отмечаются точками. Направление НС обмоток и пропорциональных им напряженностей принято изображать стрелками, параллельными линии сердечника. Если ток входит в вывод обмотки, отмеченный точкой, то стрелку необходимо направить в сторону рабочей обмотки.
Широкое применение МУ в электропитающих и измерительных устройствах и устройствах связи обусловлено такими достоинствами их, как высокая надежность; высокий коэффициент усиления (до 104—106), низкий порог чувствительности (до10-14—10-16 Вт). возможность работы от сетей переменного тока различной частоты (промышленной — 50 Гц, повышенной — 400 Гц и высокой — 103—105 Гц); конструктивная простота, сравнительная дешевизна и гальваническая развязка цепей управления и нагрузки.
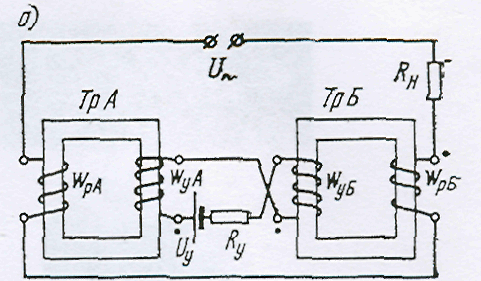

Рис.3.1. Схема дроссельного магнитного усилителя (ДМУ):
а) принципиальная схема МУ при последовательном соединении рабочих обмоток и последовательном включении нагрузки;
б) условная электрическая схема замещения
МУ можно разделить по следующим признакам:
1.По виду статической характеристики управления — на однотактные (нереверсивные) и двухтактные (реверсивные).
2. По способу осуществления обратной связи — на МУ с внешней, внутренней и смешанной обратной связью. При этом обратная связь может быть положительной или отрицательной, по току или по напряжению, магнитной или электрической, жесткой или гибкой.
3. По быстродействию — обычные и быстродействующие.
4. По способу включения нагрузки — на МУ с последовательным или параллельным относительно нагрузки включением рабочих обмоток.
5. По числу и конструкции сердечников в однотактной схеме.
3.2 Однотактный дроссельный МУ
Отличительной особенностью дроссельных МУ является отсутствие постоянной составляющей в токе рабочих обмоток (рис. 3.1а).
Рассмотрим работу такого МУ в установившемся режиме при следующих допущениях: 1. Напряжение источника питания изменяется по синусоидальному закону u~ = Um sin  t.
t.
2. Сердечники идентичны и имеют идеальную характеристику перемагничивания с индукцией насыщения B = BS (рис. 2.2а).
3. Индуктивности рассеяния обмоток wP и wy равны нулю.
4. Активные сопротивления рабочих обмоток равны нулю, а обмоток управления — Ry.
Пусть в интервале 0 ≤ ωt ≤ π намагничивается сердечник А и размагничивается сердечник Б. В момент t=0 индукция в сердечнике А равна ВyA, а в сердечнике Б равна индукции насыщении BS. Начиная с момента t=0, оба сердечника не насыщены и индукция в них изменяется. В результате изменения магнитной индукции в сердечниках А и Б в обмотках ωр и ωy будут индуцироваться ЭДС.
В течение первого полупериода, пока сердечник А еще не насыщен (интервал возбуждается), для цепи управления справедливо следующее уравнение:
 (3.1)
(3.1)
где S — поперечное сечение стержней сердечников А и Б (SА=Sb = S), ВА, ВБ — индукция в сердечниках А и Б.
В установившемся режиме работы МУ величины Вyа и ВУБ не изменяются ВyAωt=о =BvAωtt=2π и B YБωt=0 = BуБωt=2π Поэтому интегралы в пределах 0 ≤ ωt ≤2 π от первых двух слагаемых выражения (3.1) обращаются в нуль. Следовательно,

где Iу — среднее значение тока в цепи управления.
Поэтому выражение (3.1) для переменных составляющих можно записать как


Рассмотрим случай, когда сопротивление Ry настолько мало, что можно пренебречь падением напряжения на нем, т. е. (iy – Ie)Ry = 0. Тогда для переменных составляющих имеем

и
 (3.2)
(3.2)
Следовательно, при Ry = 0 сумма магнитных потоков в сердечниках А и Б постоянна, а изменение их в каждом из сердечников одинаковы, но противоположны по знаку. Поэтому и ЭДС, индуцируемые в обмотках управления, равны по величине, но противоположны по знаку. Кроме того, если магнитный поток в одном из сердечников остается постоянным (dB/dt=0), то и в другом сердечнике в течение того же интервала времени поток также будет постоянен.
В интервале возбуждения для рабочей цепи справедливо следующее уравнение равновесия ЭДС:
 (3.3)
(3.3)
В интервале возбуждения (при идеальной характеристике перемагничивания сердечников) ток в цепи нагрузки
 (3.4)
(3.4)
где  — напряженность магнитного поля в сердечнике А;
— напряженность магнитного поля в сердечнике А;  — напряженность магнитного поля в сердечнике Б; I — средняя длина магнитной силовой линии.
— напряженность магнитного поля в сердечнике Б; I — средняя длина магнитной силовой линии.
Интегрируя (3.3) с учетом равенства (3.2) и iH = 0 и нулевых начальных условиях  ;
;  можно получить закон изменения магнитной индукции в каждом из сердечников:
можно получить закон изменения магнитной индукции в каждом из сердечников:
 (3.5)
(3.5)
 (3.6)
(3.6)
где Bm=Um/(2 
 pS) — амплитудное значение магнитной индукции в сердечниках при последовательном соединении рабочих обмоток.
pS) — амплитудное значение магнитной индукции в сердечниках при последовательном соединении рабочих обмоток.
В момент t =  магнитная индукция в сердечнике А достигает значения индукции насыщения, и дальнейшее изменение индукции прекращается.
магнитная индукция в сердечнике А достигает значения индукции насыщения, и дальнейшее изменение индукции прекращается.
Из уравнения (3.5) при  величина угла насыщения
величина угла насыщения
 (3.7)
(3.7)
Из (3.5) и (3.6) при  следует, что
следует, что  и в соответствии с равенством (3.2) изменение магнитной индукции в сердечнике Б до момента
и в соответствии с равенством (3.2) изменение магнитной индукции в сердечнике Б до момента  прекращается.
прекращается.
После насыщения сердечника ни в одной из обмоток трансформатора А ЭДС не индуцируется. Поэтому обмотка управления трансформатора Б окажется замкнутой только на сопротивление  . Следовательно трансформатор Б окажется в режиме короткого замыкания, и в его обмотках ЭДС также индуктируется в соответствии с равенством (3.2).
. Следовательно трансформатор Б окажется в режиме короткого замыкания, и в его обмотках ЭДС также индуктируется в соответствии с равенством (3.2).
Все напряжение источников питания прикладывается к нагрузке. Мгновенное значение тока нагрузки и рабочих обмоток на интервале  ,
,
 (3.8)
(3.8)
Интегрируя (3.8) в пределах от α до π, найдем среднее значение тока нагрузки
 (3.9)
(3.9)
В течение интервала насыщения насыщен сердечник А, но не сердечник Б. Трансформатор Б работает как трансформатор тока с рабочей обмоткой в качестве первичной и обмоткой управления в качестве вторичной. На основании управления намагничивающих сил на интервале насыщения для трансформатора Б можно записать
 (3.10)
(3.10)
Среднее за полупериод значение тока управления будет согласовано (3.10) пропорционально I 
 (3.11)
(3.11)
Следовательно, для интервала насыщения сердечника Б также справедливо соотношение (3.11), являющееся основным управлением рассматриваемого дроссельного МУ.
Так как в интервале насыщения в рабочих обмотках намного больше, чем в интервале возбуждения, то соотношение (3.11) с достаточно высокой степенью точности соблюдается и для дроссельных МУ, выполненных на реальных сердечниках, что определяет принятую идеализацию характеристик перемагничивания.
Зависимость  называется характеристикой управления, проходной характеристикой или характеристикой вход-выход.
называется характеристикой управления, проходной характеристикой или характеристикой вход-выход.

Рисунок 3.2 Характеристика управления (проходные характеристики) дроссельного МУ на идеальных сердечниках
Обычно эта характеристика строится в относительных единицах. На рисунке 3.2 показана проходная характеристика МУ, построенная в соответствии с уравнением (3.11).
Максимальное значение тока нагрузки ΙH0m определяется из уравнения (3.9) при α = 0
ΙH0max =2Um/πRH; Ιym=ΙH0m  (3.9а)
(3.9а)
Наклон характеристики управления на линейном участке определяет коэффициент усиления по току КI, который согласно (3.11) зависит только от отношения чисел витков обмоток,

При BI ≤ Bs характеристика управления выходит из начала координат Если Bm>BS (перенасыщенный МУ), то магнитная индукция сердечника Б достигает значения индукции насыщения не в момент t = 0, а в некоторый момент t=β/ω>0, точно также в сердечнике А индукция достигает значения Bs не в момент  а в момент t=(π+ β)/ω,. Так как в этом случае ВуБ = +Вт, то из (3.6) при ВБ =Bs получаем β=arcos[Bs/Bm].
а в момент t=(π+ β)/ω,. Так как в этом случае ВуБ = +Вт, то из (3.6) при ВБ =Bs получаем β=arcos[Bs/Bm].
В интервале 0 ≤ t ≤ β∕ω и π∕ω ≤ t ≤ (л+β)/ω оба сердечника насыщены и ток нагрузки уже не зависит от величины тока управления, а определяется величиной напряжения источника питания и сопротивлением цепи нагрузки (рис.3.3). Среднее значение тока нагрузки на этих интервалах
 и
и

Минимальному току нагрузки  соответствует току управления
соответствует току управления  . Как видно из рис.3.2 перенасыщение МУ сужает диапазон регулирования тока нагрузки.
. Как видно из рис.3.2 перенасыщение МУ сужает диапазон регулирования тока нагрузки.
Достоинством рассмотренных дроссельных МУ является линейность характеристики управления и малая чувствительность коэффициента усиления по току к изменению напряжения питания, частоты сети, сопротивления нагрузки и свойств материала магнитопровода.
Контрольные вопросы:
1 Объясните принцип действия магнитного усилителя.
2 Опишите конструктивные особенности магнитного усилителя.
3 Перечислите достоинства и недостатки магнитных усилителей?
4. По каким конструктивным признакам можно разделить усилители?
5.Из каких элементов состоит магнитный усилитель?
6. К чему подключается обмотка управления?
7. К чему подключается рабочая обмотка переменного тока?
8. От чего зависит величина реактивного сопротивления обмоток переменного тока?
9. От чего зависит коэффициент усиления?
10. На чем основан принцип действия магнитных усилителей?
11. Как изменится магнитная проницаемость при насыщении сердечника?
4 Неуправляемые выпрямители
Критериями качества работы выпрямителя являются:
- коэффициент пульсации:
 (4.1)
(4.1)
- отношение амплитуды к - ой гармоники к средневыпрямленному значению напряжения.
- коэффициент выпрямления по напряжению:
 (4.2)
(4.2)
- отношение средневыпрямленного значения напряжения к действующему значению напряжения во вторичной цепи трансформатора.
- Пульсность (число фаз выпрямления):
 (4.3)
(4.3)
- отношение частоты пульсации к частоте питающего напряжения.
m – фазность Ссхемы выпрямления – число вторичных обмоток (1, 2 или 3),
 – число периодов выпрямления (1 или 2).
– число периодов выпрямления (1 или 2).
- КПД:
 (4.4)
(4.4)
- отношение активной (полезной) мощности в нагрузке к потребляемой (активной) мощности.
Критериями качества сглаживающего фильтра являются:
- коэффициент сглаживания:
 , (4.5)
, (4.5)
где  - коэффициенты пульсации на входе и выходе соответственно.
- коэффициенты пульсации на входе и выходе соответственно.
- КПД:
 . (4.6)
. (4.6)
К выпрямительному устройству предъявляются требования по качеству выходного напряжения, которое характеризуется:
- нестабильностью выходного напряжения
 (4.7)
(4.7)
- это отношение изменения выходного напряжения к номинальному значению.
В выпрямительном устройстве с трансформаторным входом существуют следующие способы регулирования выходного напряжения:
1. Регулирование в цепи переменного тока (непрерывного и импульсного действия).
2. В звене выпрямления за счет использования полупроводниковых управляемых элементов (тиристоров, симисторов, динисторов).
3. В цепи постоянного тока на выходе выпрямительного устройства за счет использования стабилизаторов напряжения (тока) непрерывного или импульсного действия.
Дата добавления: 2014-11-13; просмотров: 667; Мы поможем в написании вашей работы!; Нарушение авторских прав |