КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Управление регулятором дизеля. Электропневматический и электрогидравлический приводы регулятора дизеля и их сравнительный анализ.
Ответ- Совершенствуя свой регулятор, конструкторы Харьковского завода транспортного машиностроения заменили электропневматический механизм более чувствительным и меньшим по размерам электрогидравлическим механизмом, регулирующим затяжку всережимной пружины. Посмотрите на рис. 92. Вы видите: электрическая часть этого механизма состоит из четырех тяговых электромагнитов 1, 2, 3, 4, три из которых находятся против трех углов треугольной пластины; гидравлическая часть механизма имеет золотник управления серводвигателем, который в свою очередь управляет затяжкой пружины.
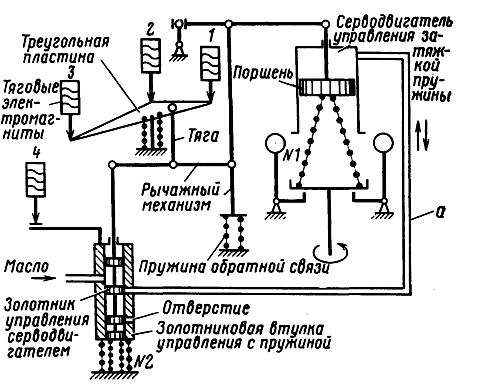 Рис. 92. Схема электрогидравлического механизма режима затяжки всережимной пружины объединенного регулятора
Рис. 92. Схема электрогидравлического механизма режима затяжки всережимной пружины объединенного регулятора
Машинист в своей кабине переводит рукоятку контроллера с позиции на позицию. В соответствии с этим электромагниты включаются или выключаются в установленной последовательности и различных комбинациях. Якоря включенных электромагнитов нажимают на пластину, и она под их действием изменяет свое положение в пространстве (пластину поэтому называют пространственной). Стоит пластине переместиться вниз на какую-то величину, как золотник управления серводвигателем через тяговый рычажный механизм открывает отверстие в золотниковой втулке, благодаря чему масло поступает по каналу а в надпоршневое пространство серводвигателя: поршень серводвигателя, перемещаясь вниз, сжимает всережимную пружину. Так достигается одно из семи различных положений поршня серводвигателя управления, т. е. одна из семи степеней затяжки всережимной пружины. А как увеличить количество степеней затяжки? С этой целью на помощь первым трем электромагнитам при ходит четвертый электромагнит, воздействующий не на треугольную пластину, а на... золотниковую втулку. Именно на золотниковую втулку, потому что ей самой предоставлена возможность перемещаться относительно золотника управления. Двигаясь вниз (когда четвертый электромагнит включен), втулка открывает имеющееся в ней отверстие, и масло из надпоршневого пространства серводвигателя получает выход в ванну регулятора (на рисунке не показана), при этом затяжка всережимной пружины ослабляется. Таким образом, включение четвертого электромагнита вызывает действие, противоположное действию трех остальных электромагнитов. Этим достигается еще семь ступеней ослабления затяжки всережимной пружины. Так, включение четвертого электромагнита в комбинации с электромагнитами треугольной пластины позволяет удвоить число ступеней затяжки всережимной пружины, т. е. получить 14 ступеней частоты вращения коленчатого вала дизеля.
Вместе с положением холостого хода регулятор обеспечивает 15 ступеней частоты вращения коленчатого вала.
Описанный регулятор с электрогидравлической системой управления (условное обозначение 9Д100) нашел применение на всех тепловозах 2ТЭ10Л, 2ТЭ10В, ТЭП10, ТЭП60, М62 и др., которые выпускались до 1972 г,
В 1972 г., однако, эти регуляторы были снабжены новыми устройствами. Уже давно было замечено, что упомянутый выше проволочный реостат с непосредственным электрическим контактом, во-первых, произвольно изменяет величину электрического сопротивления в месте контакта ползунка с проволочной намоткой, а значит, искажает регулирование нагрузки и, во-вторых, не позволяет плавно регулировать нагрузку. Для того чтобы обойти эти неприятности, конструкторы решили заменить его «бесконтактным реостатом» — индуктивным датчиком.
Индуктивный датчик представляет собой катушку со стальным якорем. Если через обмотку такой катушки пропустить переменный ток, то ее сопротивление будет изменяться в зависимости от положения якоря. Чем дальше задвинут якорь в катушку, тем больше ее сопротивление, и наоборот. Это свойство катушки используется для дополнительного регулирования мощности тепловозных дизель-генераторов. Обмотка катушки индуктивного датчика, питаемая переменным током, подключена посредством выпрямительного устройства (моста) в схему возбуждения генератора. Выпрямительный мост преобразовывает (выпрямляет) переменный ток в постоянный, необходимый для работы системы возбуждения тягового генератора.
Якорь индуктивного датчика соединен с серводвигателем регулятора нагрузки и изменяет свое положение при его перемещениях.
Применение бесконтактного индуктивного датчика позволило значительно повысить надежность регулятора и точность регулирования. Новый объединенный регулятор получил обозначение типа 10Д100 (в отличие от типа 9Д100). Регулятор типа 10Д100 имеет еще одно преимущество. Он снабжен дополнительным пятым электромагнитом, который устанавливает индуктивный датчик в положение минимального возбуждения. Это необходимо, например, при боксовании тепловоза.
Электропневматического привода- Наиболее распространено ступенчатое управление, когда рукоятка контроллера имеёт несколько фиксированных положений, которым соответствуют определенные положения исполнительного механизма привода управления регулятором и, следовательно, определенные величины угловой скорости (или подачи топлива).
| Рис. 10.4 |
| + |
На рис. 10.4 показана упрощенная кинематическая схема электропневматического привода управления регулятором дизеля на 16 положений, применяемого на тепловозах ТЭЗ и ТЭ7. Сжатие пружины 13 регулятора дизеля определяется положением зубчатой рейки 12, в свою очередь зависящего от положения зубчатого сек тора 11. В корпусе 7 привода управления имеются четыре цилиндра 1…4 с поршнями 5 и пружинами 6. Впуском и выпуском сжатого воздуха под поршнями цилиндров управляют электропневматические вентили ВТ включающего типа. При отключенной катушке вентиля соответствующий цилиндр соединен с атмосферой, а поршень находится в нижнем положении. После включения катушки в цилиндр впускается сжатый воздух, и поршень поднимается вверх до упора.
Когда все катушки вентилей отключены, привод занимает положение, соответствующее минимальному натяжению пружины и минимальной угловой скорости коленчатого вала дизеля. Последовательность включения катушек вентилей при повороте рукоятки контроллера машиниста с положения 1 до положения 16 изображена на схеме (см. рис. 10.4).
В положении 1 катушки остаются выключенными и сохраняется минимальная угловая скорость. В положении 2 включается вентиль ВТ1, поршень 1 цилиндра перемещается и, нажимая на ролик, поднимает левое плечо рычага. В результате этого по часовой стрелке поворачивается система рычагов, а зубчатый сектор опускает зубчатую рейку, увеличивая натяжение пружины.
В положении 3 ВТ1 выключается и включается ВТ2. Поршень 1 опускается, а поршень 2 поднимается. Плечи рычагов подобраны так, что рычаг 8 поворачивается на больший угол, чем в положении 2, что приводит к дальнейшему повороту зубчатого сектора и увеличению натяжения пружины. Включение вентилей чередуется таким образом, что зубчатая рейка постепенно опускается от положения к положению и в положении 16, когда все вентили включены, натяжение – наибольшее. Муфта 10 служит для настройки пружины регулятора при заданном положении привода. Пружина 9 стремится вернуть зубчатый сектор 11 в исходное положение при отключении вентилей.
На тепловозах ТЭ1, ТЭ2 и других применен аналогичный привод с тремя цилиндрами и вентилями. Из схемы (см. рис. 10.4) видно, что при исключении вентиля ВТ4 привод обеспечивает при сохранении последовательности включений вентилей ВТ1…ВТ3 восемь рабочих положений.
Этот привод прост и надежен в работе, но имеет тот недостаток, что натяжение пружины при переходе с одного положения на другое изменяется слишком быстро. В результате резко изменяются подача топлива и угловая скорость.
Электрогидравлический привод по конструкции несколько сложнее электропневматического, но режим работы дизеля изменяется более плавно. Для различных дизелей можно изменять скорость перемещения поршня 10 посредством игольчатого клапана 4. Привод обеспечивает плавное изменение режима работы дизеля даже в том случае, если машинист сразу переставит рукоятку контроллера на одно из последних положений.
Дата добавления: 2015-04-18; просмотров: 426; Мы поможем в написании вашей работы!; Нарушение авторских прав |