КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Обнаружение ошибок
Еще одной из важнейших функций МВБ является обнаружение ошибок, возникающих в процессе ввода/вывода. Центральный процессор следует оповещать о каждом случае обнаружения ошибки. Причинами возникновения последних бывают самые разнообразные факторы, которые в первом приближении можно свести к следующим группам:
Источником ошибок может стать и несовершенство системного программного обеспечения (ПО):
- непредвиденные последовательности команд или кодовые комбинации;
- некорректное распределение памяти;
- недостаточный размер буфера ввода/вывода;
- недостаточно продуманные и оттестированные комбинации системных модулей.
Среди ошибок, порождаемых пользовательским ПО, наиболее частыми являются:
- нарушение последовательности выполнения программы;
- некорректные процедуры.
Вероятность возникновения ошибки внутри процессора для современных ЦП оценивается величиной порядка 10-18, в то время как для остальных составляющих ВМ она лежит в диапазоне 10-8 – 10-12.
33. Структура модуля ввода-вывода, описание регистров (привести схему).
34. Методы управления вводом-выводом: программно управляемый ввод/вывод.
Программно управляемый ввод/вывод
Наиболее простым методом управления вводом/выводом является программно управляемый ввод/вывод, часто называемый также вводом /выводом с опросом. Здесь ввод/вывод происходит под полным контролем центрального процессора и реализуется специальной процедурой ввода/вывода. В этой процедуре ЦП с помощью команды ввода/вывода сообщает модулю ввода/вывода, а через него и внешнему устройству о предстоящей операции. Адрес модуля и ВУ, к которому производится обращение, указывается в адресной части команды ввода или вывода. Модуль исполняет затребованное действие, после чего устанавливает в единицу соответствующий бит в своем регистре состояния. Ничего другого, чтобы уведомить ЦП, модуль не предпринимает. Следовательно, для определения момента завершения операции или пересылки очередного элемента блока данных процессор должен периодически опрашивать и анализировать содержимое регистра состояния МВБ.
Иллюстрация процедуры программно управляемого ввода блока данных с устройства ввода приведена на рис. 8.6. Данные читаются пословно. Для каждого читаемого слова ЦП должен оставаться в цикле проверки, пока не определит, что слово находится в регистре данных МВБ, то есть доступно для считывания.
Процедура начинается с выдачи процессором команды ввода, в которой указан адрес конкретного МВБ и конкретного ВУ. Существуют четыре типа команд В/ВЫВ, которые может получить МВБ: управление, проверка, чтение и запись.
Команды управления используются для активизации ВУ и указания требуемой операции. Например, в устройство памяти на магнитной ленте может быть выдана команда перемотки или продвижения на одну запись. Для каждого типа ВУ характерны специфичные для него команды управления.
Команда проверки применяется для проверки различных ситуаций, возникающих в МВБ и ВУ в процессе ввода/вывода. С помощью таких команд ЦП способен выяснить, включено ли ВУ, готово ли оно к работе, завершена ли последняя операция ввода/вывода и не возникли ли в ходе ее выполнения какие-либо ошибки. Действие команды сводится к установке или сбросу соответствующих разрядов регистра состояния МВБ.
Команда чтения побуждает модуль получить элемент данных из ВУ и занести его в регистр данных (РД). ЦП может получить этот элемент данных, запросив МВБ поместить его на шину данных.
Команда записи заставляет модуль принять элемент данных (байт или слово) с шины данных и переслать его в РД с последующей передачей в ВУ.
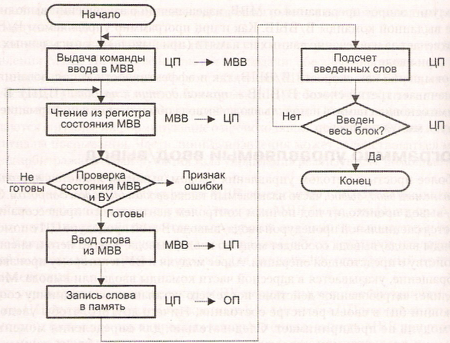
Рис. 8.6.Программно управляемый ввод данных
Если к МВБ подключено несколько ВУ, то в процедуре ввода/вывода нужно производить циклический опрос всех устройств, с которыми в данный момент up-. -изводятся операции В/ВЫВ.
Из блок-схемы (см. рис. 8.6) явно виден основной недостаток программно управляемого В/ВЫВ — неэффективное использование процессора из-за ожидания готовности очередной порции информации, в течение которого никаких иных полезных действий ЦП не выполняет. Кроме того, пересылка даже одного слова требует выполнения нескольких команд. ЦП должен тратить время на анализ битов состояния МВБ, запись в МВБ битов управления, чтение или запись данных со скоростью, определяемой внешним устройством. Все это также отрицательно сказывается на эффективности ввода/вывода.
Главным аргументом в пользу программно управляемого ввода/вывода является простота МВБ, поскольку основные функции по управлению В/ВЫВ берет на себя процессор. При одновременной работе с несколькими ВУ приоритет устройств легко изменить программными средствами (последовательностью опроса). Наконец, подключение к СВВ новых внешних устройств или отключение ранее подключенных также реализуется без особых сложностей.
35. Методы управления вводом-выводом: ввод/вывод по прерываниям.
Ввод/вывод по прерываниям
Как уже отмечалось, основным недостатком программно управляемого В/ВЫВ являются простои процессора в ожидании, пока модуль ввода/вывода выполнит очередную операцию. Альтернативой может быть вариант, когда ЦП выдает команду В/ВЫВ, а затем продолжает делать другую полезную работу. Когда ВУ готово к обмену данными, оно через МВВ извещает об этом процессор с помощью запроса на прерывание. ЦП осуществляет передачу очередного элемента данных, после чего возобновляет выполнение прерванной программы.
Обсудим процесс ввода блока данных е использованием В/ВЫВ по прерываниям (рис. 8.7). Оставим без внимания такие подробности, как сохранение и восстановления контекста, действия, выполняемые при завершении пересылки блока данных, а также в случае возникновения ошибок.
Процедура ввода блока данных по прерываниям реализуется следующим образом. ЦП выдает команду чтения, а затем продолжает выполнение других заданий, например другой программы. Получив команду, МВВ приступает к вводу элемента данных с ВУ. Когда считанное слово оказывается в регистре данных модуля, VIBB формирует на управляющей линии сигнал прерывания ЦП. Выставив запрос, МВВ помещает введенную информацию на шину данных, после чего он готов к следующей операции В/ВЫВ. ЦП в конце каждого цикла команды проверяет наличие запросов прерывания. Когда от МВВ приходит такой сигнал, ЦП сохраняет контекст текущей программы и обрабатывает прерывание. В рассматриваемом случае ЦП читает слово из модуля, записывает его в память и выдает модулю команду на считывание очередного слова. Далее ЦП восстанавливает контекст прерванной программы и возобновляет ее выполнение.
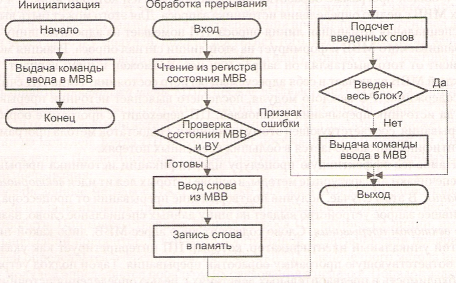
Рис. 8.7.Ввод данных по прерыванию
Этот метод эффективнее программно управляемого В/ВЫВ, поскольку устраняет ненужные ожидания, однако обработка прерывания занимает достаточно много времени ЦП. Кроме того, каждое слово, пересылаемое из памяти в модуль В/ВЫВ или в противоположном направлении, как и при программно управляемом В/ВЫВ, проходит через ЦП.
Реализация ввода/вывода по прерываниям
При реализации ввода/вывода по прерываниям необходимо дать ответы на два вопроса. Во-первых, определить, каким образом ЦП может выяснить, какой из МВВ и какое из подключенных к этому модулю внешних устройств выставили запрос. Во-вторых, при множественных прерываниях требуется решить, какое из них должно быть обслужено в первую очередь.
Сначала рассмотрим вопрос идентификации устройства. Здесь возможны три основных метода:
- множественные линии прерывания;
- программная идентификация;
- векторное прерывание.
Наиболее простой подход к решению проблемы определения источника запроса — применение множественных линий прерывания между ЦП и модулями ввода/вывода, хотя выделение слишком большого количества управляющих линий для этих целей нерационально. Более того, даже если присутствует несколько линий прерывания, желательно, чтобы каждая линия использовалась всеми МВБ. при этом для каждой линии действует один из двух остальных методов идентификации устройства.
При программной идентификации, обнаружив запрос прерывания, ЦП переходит к общей программе обработки прерывания, задачей которой является опрос всех МВБ с целью определения источника запроса. Для этого может быть выделена специальная командная линия опроса. ЦП помещает на адресную шину адрес опрашиваемого МВВ и формирует на этой линии сигнал опроса. Реакция модуля зависит от того, выставлял он запрос или нет. Возможен и иной вариант, когда каждый МВВ включает в себя адресуемый регистр состояния. Тогда ЦП считывает содержимое PC каждого модуля, после чего выясняет источник прерывания. Когда источник прерывания установлен, ЦП переходит к программе обработки прерывания, соответствующей этому источнику. Недостаток метода программной идентификации заключается в больших временных потерях.
Наиболее эффективную процедуру идентификации источника прерывания обеспечивают аппаратурные методы, в основе которых лежит идея векторного прерывания. В этом случае, получив подтверждение прерывания от процессора, выставившее запрос устройство выдает на шину данных специальное слово, называемое вектором прерывания. Слово содержит либо адрес МВБ, либо какой-нибудь другой уникальный идентификатор, который ЦП интерпретирует как указатель на соответствующую программу обработки прерывания. Такой подход устраняет необходимость в предварительных действиях с целью определения источника запроса прерывания. Реализуется он с помощью хранящейся в ОП таблицы векторов прерывания (рис. 8,8), где содержатся адреса программ обработки прерываний. Входом в таблицу служит вектор прерывания. Начальный адрес таблицы (база) обычно задается неявно, то есть под таблицу отводится вполне определенная область памяти.
Наиболее распространены два варианта векторной идентификации источника запроса прерывания: цепочечный опрос и арбитраж шины.

Рис. 8.8.Идентификация запроса с помощью вектора прерывания
При цепочечном методе для передачи запроса прерывания модули ввода/вывода совместно используют одну общую линию. Линия подтверждения прерывания последовательно проходит через все МВВ. Когда ЦП обнаруживает запрос прерывания, он посылает сигнал по линии подтверждения прерывания. Этот сигнал движется через цепочку модулей, пока не достигнет того, который выставил запрос. Запросивший модуль реагирует путем выдачи на шину данных своего вектора прерывания.
В варианте арбитража шипы МВБ, прежде чем выставить запрос на линии запроса прерывания, должен получить право на управление шиной. Таким образом, в каждый момент времени активизировать линию запроса прерывания может только один из модулей. Когда ЦП обнаруживает прерывание, он отвечает по линии подтверждения. После этого запросивший модуль помещает на шину данных свой вектор прерывания.
Перечисленные методы служат не только для идентификации запросившего МВВ, но и для назначения приоритетов, когда прерывание запрашивают несколько устройств. При множественных линиях запроса ЦП начинает с линии, имеющей наивысший приоритет. В варианте программной идентификации приоритет модулей определяется очередностью их проверки. Для цепочечного метода приоритет модулей определяется порядком их следования в цепочке.
36. Методы управления вводом-выводом: прямой доступ к памяти. Прямой доступ к памяти
Хотя ввод/вывод по прерываниям эффективнее программно управляемого, оба этих метода страдают двумя недостатками:
- темп передачи при вводе/выводе ограничен скоростью, с которой ЦП в состоянии опросить и обслужить устройство;
- ЦП вовлечен в управление передачей, для каждой пересылки он должен выполнить определенное количество команд.
Когда пересылаются большие объемы данных, требуется более эффективны;: способ ввода/вывода— прямой доступ к памяти (ПДП). ПДП предполагает наличие на системной шине дополнительного модуля — контроллера прямого доступа к памяти (КПДП), способного брать на себя функции ЦП по управлению системной шиной и обеспечивать прямую пересылку информации между ОП и ВУ. без участия центрального процессора. В сущности, КПДП — это и есть модуль ввода/вывода, реализующий режим прямого доступа к памяти.
Если ЦП желает прочитать или записать блок данных, он прежде всего должен поместить в КПДП (рис. 8.9) информацию, характеризующую предстоящее действие. Этот процесс называется инициализацией КПДП и включает в себя занесение в контроллер следующих четырех параметров:
вида запроса (чтение или запись);
адреса устройства в в од а/вы во да;
адреса начальной ячейки блока памяти, откуда будет извлекаться или куда будет вводиться информация;
количества слов, подлежащих чтению или записи.

Рис. 8.9.Организация прямого доступа к памяти
Первый параметр определяет направление пересылки данных: из ОП в ВУ или наоборот. За исходную точку обычно принимается память, поэтому под чтением понимают считывание данных из ОП и выдачу их на устройство вывода, а под записью — прием данных из устройства ввода и запись в ОП. Вид запроса запоминается в схеме логики управления контроллера.
К КПДП обычно могут быть подключены несколько ВУ, а адрес УВВ конкретизирует, какое из них должно участвовать в предстоящем обмене данными. Этот адрес запоминается в логике управления КПДП.
Третий параметр — адрес начальной ячейки — хранится в регистре адреса (РА) контроллера. После передачи каждого слова содержимое РА автоматически увеличивается на единицу, то есть в нем формируется адрес следующей ячейки ОП.
Размер блока в словах заносится в счетчик данных (СД) контроллера. После передачи каждого слова содержимое СД автоматически уменьшается на единицу. Нулевое состояние СД свидетельствует о том, что пересылка блока данных завершена.
После инициализации процесс пересылки информации может быть начат в любой момент. Инициаторами обмена вправе выступать как ЦП, так и ВУ. Устройство, желающее начать В/ВЫВ, извещает об этом контроллер подачей соответствующего сигнала. Получив такой сигнал, КПДП выдает в ЦП сигнал «Запрос ПДП». В ответ ЦП освобождает шины адреса и данных, а также тс линии шины управления, по которым передаются сигналы, управляющие операциями на шине адреса (IIIА) и шине данных (ШД). К таким, прежде всего, относятся линии ЧтЗУ, ЗпЗУ, Выв, Вв и линия выдачи адреса на 111 А. Далее ЦП отвечает контроллеру сигналом «Подтверждение ПДП», который для последнего означает, что ему делегированы права на управление системной шиной и можно приступать к пересылке данных.
Процесс пересылки каждого слова блока состоит из двух этапов.
При выполнении операции чтения (ОП →ВУ) на первом этапе КПДП выставляет на шину адреса содержимое РА (адрес текущей ячейки ОП) и формирует сигнал ЧтЗУ. Считанное из ячейки ОП слово помещается на шину данных. На втором этапе КПДП выставляет на ША адрес устройства вывода и формирует сигнал Выв, который обеспечивает передачу слова с шины данных в ВУ.
При выполнении операции записи (ВУ -> ОП) КПДП сначала выдает на шину данных адрес устройства ввода и формирует сигнал Вв, по которому введенные данные поступают на шину данных. На втором этапе КПДП помещает на ША адрес ячейки ОП, куда должны быть занесены данные, и выдает сигнал ЗпЗУ. Этим сигналом информация с ШД записывается в ячейку ОП.
Как при чтении, так и при записи происходит буферизация пересылаемого слова в регистре данных (РД) контроллера. Это необходимо для компенсации различий в скорости работы ОП и ВУ, в силу чего сигналы Выв и Вв формируются контроллером лишь при получении от ВУ подтверждения о готовности. Буферизация сводится к тому, что после первого этапа слово с ШД заносится в РД, а перед вторым — возвращается из РД на шину данных.
После пересылки каждого слова логика управления прибавляет единицу к содержимому РА (формирует адрес следующей ячейки ОП) и уменьшает на единицу содержимое СД (ведет подсчет переданных слов).
Когда пересылка завершена (при нулевом значении в СД), КПДП снимает сигнал «Запрос ПДП», в ответ на что ЦП снимает сигнал «Подтверждение ПДП» и вновь берет на себя управление системной шиной, то есть ЦП вовлечен в процесс ввода/вывода только в начале и конце передачи.
Эффективность ПДП зависит от того, каким образом реализовано распределение системной шины между ЦП и КПДП в процессе пересылки блока. Здесь может применяться один из трех режимов:
- блочная пересылка;
- пропуск цикла;
- прозрачный режим.
При блочной пересылке КПДП полностью захватывает системную шину с момента начала пересылки и до момента завершения передачи всего блока. На весь этот период ЦП не имеет доступа к шине.
В режиме пропуска цикла КПДП после передачи каждого слова на один цикл шины освобождает системную шину, предоставляя ее на это время процессору. Поскольку КПДП все равно должен ждать готовности ПУ, это позволяет ЦП эффективно распорядиться данным обстоятельством.
В прозрачном режиме КПДП имеет доступ к системной шине только в тех циклах, когда ЦП в ней не нуждается. Это обеспечивает наиболее эффективную работу процессора, но может существенно замедлять операцию пересылки блока данных. Здесь многое зависит от решаемой задачи, поскольку именно она определяет интенсивность использования шины процессором.
В отличие от обычного прерывания в пределах цикла команды имеется несколько точек, где КПДП вправе захватить шину (рис 8.10). Отметим, что это не прерывание: процессору не нужно запоминать контекст задачи.

Рис. 8.10.Точки возможного вмешательства в цикл команды при прямом доступе к памяти и при обычном прерывании
Механизм ПДП может быть реализован различными путями. Некоторые возможности показаны на рис. 8.11.
В первом примере (см. рис. 8.11, а) все ВУ совместно используют общую системную шину. КПДП работает как заменитель ЦП и обмен данными между памятью и ВУ через КПДП производит через программно управляемый ввод/вывод. Хотя этот вариант может быть достаточно дешевым, эффективность его невысока. Как и в случае программно управляемого ввода/вывода, осуществляемого процессором, каждая пересылка требует двух циклов шины.

Рис.8.11. Возможные конфигурации систем прямого доступа к памяти
Число необходимых циклов шины может быть уменьшено при объединении функций КПДП и ВУ. Как видно из рис. 8.11, б, это означает, что между КПДП и одним или несколькими ВУ есть другой тракт, не включающий системную шину. Логика ПДП может быть частью ВУ, либо это может быть отдельный КПДП, управляющий одним или несколькими внешними устройствами. Допустим и еще один шаг в том же направлении (см. рис. 8.11, в) — соединение КПДП с ВУ посредством шины ввода/вывода. Это уменьшает число интерфейсов В/ВЫВ в КПДП и делает такую конфигурацию легко расширяемой. В двух последних вариантах системная шина задействуется КПДП только для обмена данными е памятью. Обмен данными между КПДП и ВУ реализуется минуя системную шину.
Дата добавления: 2015-04-18; просмотров: 350; Мы поможем в написании вашей работы!; Нарушение авторских прав |