КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Регулировочные мероприятия, проводимые в условиях устойчивой эксплуатационной работы
Рис.1. Генератор импульсов на двух инверторах
Схема имеет два динамических состояния. В первом из них, когда на выходе D1.1 состояние лог. "1" (выход D1.2 лог. "0"), конденсатор С1 заряжается. В процессе заряда напряжение на входе инвертора D1.1 возрастает, и при достижении значения Uпор=0,5Uпит происходит скачкообразный переход во второе динамическое состояние, в котором на выходах D1.1 лог. "О", D1.2 - "1". В этом состоянии происходит перезаряд емкости (разряд) током обратного направления. При достижении напряжения на С1 Unop происходит возврат схемы в первое динамическое состояние. Диаграмма напряжений поясняет работу. Резистор R2 является ограничительным, и его сопротивление не должно быть меньше 1 кОм, а чтобы он не влиял на расчетную частоту, номинал резистора R1 выбираем значительно больше R2 (R2<0,01R1). Ограничительный резистор (R2) иногда устанавливают последовательно с конденсатором. При использовании неполярного конденсатора С1 длительность импульсов (tи) и пауза (tо) будут почти одинаковыми: tи=to=0,7R1C1. Полный период T=1,4R1C1. Резистор R1 и конденсатор С1 могут находиться в диапазоне 20 к0м...10 МОм; 300 пф...100 мкФ.
При использовании в схеме (рис. 1б) двух инверторов микросхемы К561ЛН2 (они имеют на входе только один защитный диод) перезаряд конденсатора будет происходить от уровня Uпит+Unop. В результате чего симметричность импульсов нарушается tи=1,1R1C1, to=0,5R1C1, период T=1,6R1C1.
Так как порог переключения логических элементов не соответствует точно половине напряжения питания, чтобы получить симметричность импульсов, в традиционную схему генератора можно добавить цепь из R2 и VD1, рис. 1в. Резистор R2 позволяет подстройкой получить меандр (tи=to) на выходе генератора.
Шифратори імпульсних ознак.
В системах телемеханики по способу преобразований исходных данных можно выделить два вида шифраторов: шифраторы импульсных признаков (ШФИП) и шифраторы комбинаций (ШФК).
Шифраторы импульсных признаков. Преобразование множества двоичных сообщений п в тождественное ему множество сигналов, соответствующих содержанию регистра сообщений, осуществляют шифраторы импульсных признаков. По сути, ШФИП составляют кодер канала. В зависимости от типа системы эти п разрядов регистров кода могут содержать независимые сообщения или элементы сложного сообщения. Опрос разрядов может происходить одновременно (рис. 4.27,а) или последовательно во времени (рис. 4.27,6).
При параллельной передаче содержания регистра (см. рис. 4.27,а) каждый разряд связан со своим модулятором и обеспечивает перевод модулятора на выработку импульсного признака в соответствии с состоянием разряда.
При последовательной передаче сигналов (см. рис. 4.27,6) используется один модулятор с числом управляющих цепей, соответствующим числу импульсов в сложном сигнале. Каждая такая цепь отражает определенную позицию распределителя, т. е. действует в определенное время, и состояние соответствующей ячейки регистра. В этом случае ШФИП обеспечивает преобразование параллельного кода сообщения, записанного в регистр, в последовательность сигнальных импульсов, отражающих это сообщение. К информационным импульсам могут быть добавлены также специальные служебные импульсы.
В комбинационных системах рассмотренную совокупность цепей управления модулятором принято называть шифратором.
В схеме шифратора релейной системы с полярными импульсными признаками (рис. 4.28) при включении реле ПЛ или МЛ в линию связи посылается ток определенной полярности, т. е. эти реле составляют схему генератора импульсных признаков.

 б)
б)
Рис. 4.27. Функциональная схема шифратора импульсных признаков при параллельной и последовательной передаче элементов сигнала
Шифратори кодових комбінацій.
 Как видно из функциональных структур систем телемеханики, ШФК являются составной частью кодера источника и обеспечивают перевод любого из N = 2n двоичных сообщений в n – разрядный код условленного для кодера канала вида. Обычно используют код с постоянным числом единиц (постоянным весом), т. е. комбинации из п элементов по т, где т — число единиц.
Как видно из функциональных структур систем телемеханики, ШФК являются составной частью кодера источника и обеспечивают перевод любого из N = 2n двоичных сообщений в n – разрядный код условленного для кодера канала вида. Обычно используют код с постоянным числом единиц (постоянным весом), т. е. комбинации из п элементов по т, где т — число единиц.
 Отсюда общее правило: ШФК представляет собой комбинационную схему, содержащую N входов с т разветвлениями каждый, поданными на п схем ИЛИ, с выхода которых снимается код— комбинации из п элементов по т (рис. 4.30).
Отсюда общее правило: ШФК представляет собой комбинационную схему, содержащую N входов с т разветвлениями каждый, поданными на п схем ИЛИ, с выхода которых снимается код— комбинации из п элементов по т (рис. 4.30).
Схемная реализация ШФК обычно очень проста. В релейно-контактных системах на входе каждого разряда регистра кода включается набор (схема ИЛИ) контактов тех реле регистра сообщений (1P—NP), которые будут включаться при записи единицы в данном разряде кода (рис. 4.31).


Рис. 4.31. Схема релейного шифратора комбинаций (а) и структура комбинаций (б)
Аналогично в бесконтактных схемах (рис. 4.32) на вход каждого разряда регистра кода подключена схема ИЛИ (шина с диодами) с входами, подключенными к нужным шинам матрицы состояний регистра сообщений.
При переключении в состояние 1 любого триггера регистра C1N происходит переключение т триггеров регистра кода Сmn, подключенных к соответствующей горизонтальной шине.
После реализации зашифрованной комбинации производится сброс обоих регистров в исходное состояние. С этого момента возможны переключение другого триггера в регистре C1N и кодированная запись этого сообщения в регистре Сmn.
Однако, кроме кодов с постоянным весом, для которых рассмотрены правила выполнения ШФК, в системах телемеханики могут быть использованы и другие коды, в частности, двоичные на все сочетания. Шифратор комбинаций двоичного кода (рис. 4.33, а) отличается лишь разным числом ответвлений с выходов регистра сообщений в зависимости от номера разряда. В настоящее время ШФК широко выпускаются в интегральном исполнении (рис. 4.33, б).

 |
Рис. 4.32. Схема бесконтактного шифратора комбинаций
Рис. 4.33 Рис. 4.34
Рис. 4.33. Схема шифратора комбинаций двоичного кода
Рис. 4.34. Схема двухступенчатого шифратора комбинаций двоичного кода
Шифратор ШФК с большим числом входов и выходов организуется по двухступенчатой схеме (рис. 4.34).
В системах телемеханики часто возникает необходимость перехода от одного вида кода к другому, например, от простого двоичного к корректирующему коду и т.п. Такие переходы выполняют кодопреобразователи. Они обеспечивают перевод каждой кодовой комбинации одного множества сигналов в эквивалентную ей комбинацию другого множества с измененным числом разрядов. Кодопреобразователи выполняются по структуре, приведенной на рис. 4.35, а. Такой преобразователь требует предварительного перевода исходной комбинации Сmn в C1N (декодирования), а затем повторного кодирования по новой структуре ШФК, т. е. перехода:

Однако в тех случаях, когда можно выразить аналитически зависимости каждого элемента преобразованного кода от элементов преобразуемого, т. е. указать переключательные функции, схема кодопреобразователя сводится к набору комбинационных схем. Число таких схем будет равно числу разрядов в преобразованном коде. На рис. 4.35. б приведена схема комбинационного преобразователя трехэлементного равномерного кода в пятиэлементный (С25).
Дешифратори імпульсних ознак.

Полярний демодулятор

Дешифратор кодових комбінацій.


Пускопочинаючі вузли.


Канали систем телемеханіки.
По любой линии связи может быть организовано определенное число каналов для независимой передачи сообщений. При передаче сигналов телемеханики такой канал принято называть телемеханическим.
Телемеханические каналы являются средством объединения в систему источника и получателя сообщений.
Источники информации разнообразны, рассредоточены в пространстве, могут иметь детерминированное и неопределенное число состояний. Соответственно и организация устройств телемеханики различна для сосредоточенных и рассредоточенных объектов, для отражения их дискретного или непрерывного множества состояний. Любое изменение внутреннего состояния объектов контроля принято считать событием. Окаждом событии контролирующий пункт должен получить сообщение. Сообщение, порожденное событием на передающем конце, должно быть, определенным образом доставлено получателю. Передача сообщений в системах телемеханики происходит по каналам связи, где в роли переносчика сообщений выступает переменный или постоянный ток. Поэтому переносчик с нанесенным на него сообщением уже представляет собой сигнал. Разумеется, что каждое сообщение образует свой собственный сигнал, отличный от других. Это необходимо для различения сообщений на приемном конце по виду сигналов.
При непрерывном изменении параметров во времени сигналы
могут быть аналоговымиили после дополнительных преобразований (квантование) — дискретными(рис. 2.9).
 Сигналы как функции времени у = х(t) графически удобно представлять совокупностью точек определенной кривой в двухмерном пространстве прямоугольных координат х и t (см. рис.2.8). Однако не во всех случаях такое представление сигналов оказывается достаточным и наглядным, в особенности для изучения свойств совокупности сложных сигналов. В этих случаях используют сложные пространства сигналов, в которых каждый сигнал изображается точкой в этом многомерном пространстве. Для сравнительной оценки сигналов одного множества по каким-либо свойствам каждой паре элементов множества ставится в соответствие действительное положительное число, называемое расстоянием между элементами.
Сигналы как функции времени у = х(t) графически удобно представлять совокупностью точек определенной кривой в двухмерном пространстве прямоугольных координат х и t (см. рис.2.8). Однако не во всех случаях такое представление сигналов оказывается достаточным и наглядным, в особенности для изучения свойств совокупности сложных сигналов. В этих случаях используют сложные пространства сигналов, в которых каждый сигнал изображается точкой в этом многомерном пространстве. Для сравнительной оценки сигналов одного множества по каким-либо свойствам каждой паре элементов множества ставится в соответствие действительное положительное число, называемое расстоянием между элементами.
Интервал времени, в течение которого признак переносчика не меняется, называют импульсом сложного сигнала,а используемые характеристики переносчика — импульсными признаками.
Диспечерське керування на залізничному транспорті.
Диспетчерская централизация (ДЦ) — это комплекс устройств железнодорожной автоматики, телемеханики и связи, предназначенный для централизованного диспетчерского управления стрелками, сигналами и другими объектами станций диспетчерского участка (круга).
Станционная кодовая централизация (СКЦ) — это телемеханическая система управления удаленными на расстояние 8—25 км стрелками и сигналами станций, оборудованных электрической централизацией. Она позволяет сократить расход кабеля на станциях, сохраняя управление всеми передвижениями в пределах станции в ведении дежурного поста электрической централизации (ЭЦ).
Устройства ДЦ должны обеспечивать: управление из одного пункта стрелками и сигналами ряда раздельных пунктов; контроль на аппарате управления положения и занятости стрелок, занятости перегонов, путей на станциях и прилегающих к ним блок-участков, а также повторение показаний входных, маршрутных и выходных светофоров; возможность передачи станций на резервное управление стрелками и сигналами по приему и отправлению поездов, маневровой работе или передаче стрелок на местное управление для маневров; автоматическую запись графика исполненного движения поездов; выполнение требований, предъявляемых к ЭЦ и автоблокировке. Диспетчер управляет устройствами ЭЦ и принимает решения по организации движения поездов, в том числе и в случаях возникновения конфликт-
ных поездных ситуаций. Это способствует наилучшему использованию пропускной способности участка при полном обеспечении безопасности движения поездов.
Диспетчерскую централизацию применяют на одно- и много-путных линиях дорог, включая пригородные участки с интенсивным движением поездов. Наиболее эффективна ДЦ на однопутных линиях, особенно если перегоны имеют двухпутные вставки, а раздельные пункты построены по продольной схеме, позволяющей выполнять безостановочные скрещения поездов. В этом случае при ДЦ участковая скорость движения поездов повышается на 15—25 %, а пропускная способность — на 35—40 %. Численность эксплуатационного персонала при этом на 100 км железнодорожных линий сокращается на 60 человек. Срок окупаемости капиталовложений, затраченных на оборудование однопутного участка устройствами ДЦ, не превышает 3 лет.
Види систем диспетчерської централізації.
| Виды телемеханических передач |
| Циклическая передача - сообщения передаются периодически в заданной последовательности, т.е. циклами. В первом цикле может передаваться сообщение №2, во втором - ничего не передается в третьем цикле - сообщение №3 и т.д. Преимущества: 1) постоянная готовность к работе; простота получения непрерывной сигнализации о состоянии управляемых объектов; постоянный контроль за состоянием линии связи, ее работоспособностью. Спорадическая телепередача - сообщение передается только с появлением события на передающем пункте лишь в течение определенных интервалов времени, которые иногда бывают заранее заданы или возникают по мере накопление информации. Устройства работают только при приеме и передаче информации, в остальное время они выключены, Это не позволяет контролировать работоспособность системы. Такая передача целесообразна, если сообщения возникают относительно редко или допустима некоторая задержка в их передаче. Сообщения накаливаются и передаются сразу. Многоканальная телепередача - в одном цикле или одной полосе частот сообщения передаются от многих источников (передача ТИ и ТС). Может быть циклической или спорадической с любым способом разделения сигналов. Адресная телепередача - многоканальная, в основе, заложены кодово - адресное разделение сигналов, может быть циклической и спорадической. Способы выбора объектов Выбор объекта происходит в современных системах телемеханики с временным кодовым разделением сигналов в зависимости от количества управляемых объектов (исполнительных цепей), после того, как на контролируемом пункте принята команда, посланная с пункта управления. Непосредственный или одноступенчатый способ.Сигнал на приемной стороне после расшифровки поступает на исполнительное устройство, с помощью которого происходит включение объекта. |
Об'єкти диспетчерського керування. Станційна кодова централізація.






Яка економічна ефективність впровадження систем диспетчерського керування?
при ДЦ участковая скорость движения поездов повышается на 15—25 %, а пропускная способность — на 35—40 %. Численность эксплуатационного персонала при этом на 100 км железнодорожных линий сокращается на 60 человек. Срок окупаемости капиталовложений, затраченных на оборудование однопутного участка устройствами ДЦ, не превышает 3 лет.
Системи ДВК, ПЧДЦ, ЧДЦ. Їх переваги та недоліки.
Циклическая передача - сообщения передаются периодически в заданной последовательности, т.е. циклами.
В первом цикле может передаваться сообщение №2, во втором - ничего не передается в третьем цикле - сообщение №3 и т.д.
Преимущества:
1) постоянная готовность к работе;
1. простота получения непрерывной сигнализации о состоянии управляемых объектов;
2. постоянный контроль за состоянием линии связи, ее работоспособностью.
Спорадическая телепередача - сообщение передается только с появлением события на передающем пункте лишь в течение определенных интервалов времени, которые иногда бывают заранее заданы или возникают по мере накопление информации.
Устройства работают только при приеме и передаче информации, в остальное время они выключены, Это не позволяет контролировать работоспособность системы.
Такая передача целесообразна, если сообщения возникают относительно редко или допустима некоторая задержка в их передаче. Сообщения накаливаются и передаются сразу.
Система диспетчерського керування «Нева». Переваги та недоліки.


Система диспетчерського керування «Луч». Переваги та недоліки.


Переваги та недоліки систем спорадичного типу.
Спорадическая телепередача - сообщение передается только с появлением события на передающем пункте лишь в течение определенных интервалов времени, которые иногда бывают заранее заданы или возникают по мере накопление информации.
Устройства работают только при приеме и передаче информации, в остальное время они выключены, Это не позволяет контролировать работоспособность системы.
Такая передача целесообразна, если сообщения возникают относительно редко или допустима некоторая задержка в их передаче. Сообщения накаливаются и передаются сразу.
Переваги та недоліки систем циклічного типу.
Циклическая передача - сообщения передаются периодически в заданной последовательности, т.е. циклами.
В первом цикле может передаваться сообщение №2, во втором - ничего не передается в третьем цикле - сообщение №3 и т.д.
Преимущества:
1) постоянная готовность к работе;
1. простота получения непрерывной сигнализации о состоянии управляемых объектов;
2. постоянный контроль за состоянием линии связи, ее работоспособностью.
(((А)))Технічна система диспетчерського керування. Переваги танедоліки.
Технические системы (рис. 1.1, а) создаются для выполнения определенной целевой функции. Они способны работать при изменении внешних условий в определенных пределах. Процесс формирования целесообразного (эффективного в смысле выполнения функции) поведения системы называется управлением. Поведение технической системы определяется программами, заложенными в нее при создании.
На одну и ту же ситуацию на входе система всегда вырабатывает одну и ту же программу управления, т.е. поведение системы однозначно. Суть управления в технической системе сводится к отнесению входной ситуации по определенному критерию к одной из известных, при которой реализуется определенная программа воздействия на объект управления. Обычно в технических системах критерий один и число программ невелико.
(((Б)))Кібернетична система диспетчерського керування. Переваги та недоліки.
Более сложным поведением обладают кибернетические системы (рис. 1.1, б), в которые технические системы входят как подсистемы (элементы). В отличие от технической системы для оценки входной ситуации используются многие критерии и соответственно для определенного набора входных данных могут быть выбраны разные программы управления. Кибернетическая система имеет возможность перекомбинации программ управления под воздействием внешнего или внутреннего управления. В одной и той же ситуации однотипные кибернетические системы могут вести себя, с одной стороны, по-разному, а с другой — одинаково в различных ситуациях, т.е. для кибернетических систем характерно формирование поведения исходя из оценки внешней ситуации по определенному критерию в соответствии с внутренней целью.

Структурні схеми взаємозв’язків в системі ДЦ. Які з структур застосовуються найчастіше і чому.
Кроме внутреннего управления (самоуправления), система может подвергаться внешнему управлению, если она входит как элемент (подсистема) в более сложную целенаправленную систему в качестве управляемой или сотрудничающей. Взаимоотношения с другими системами могут быть организованы по разным структурам: цепочечной (рис. 1.2, а), централизованной радиальной (рис. 1.2, б), кольцевой (рис. 1.2, в), многосвязевой (рис. 1.2, г).

Рис. 2. Структурные схемы взаимосвязи систем
Под структурой системы принято понимать множество возможных отношений между подсистемами и элементами внутри системы. Структуры реализуются при помощи связей, осуществляющих взаимодействие между подсистемами (элементами). По характеру взаимодействия различают прямые и обратные связи. Этим выражается направленность передачи управляющей и контрольной информации между подсистемами. Часто структура выражает только соотношение между подсистемами по управлению (подчиненность).
Ієрархічна структура. Область застосування, переваги та недоліки.
В диспетчерском управлении железнодорожным транспортом получили распространение иерархические централизованные структуры (рис. 1.2, д). В этом случае каждый более высокий уровень управления имеет радиальные связи с однотипными управляемыми системами. Число систем на каждом уровне зависит от сложности целевых функций и управляемых систем.
Главной причиной появления любой иерархии является несоответствие между сложностью объекта управления и способностью управляющего органа охватить и переработать информацию об объекте с требуемой точностью в заданное время. Действительно, любой сложный производственный процесс требует своевременного формирования согласованных с другими процессами правильных решений, ведущих к цели.
Всем иерархическим системам управления присущи следующие основные особенности:
последовательная вертикальная соподчиненность;
правом вмешательства в действие любой системы обладает только система вышестоящего уровня;
действия любой системы фактически зависят от исполнения своих функций управляемыми подсистемами;
более высокие уровни управления имеют дело с более крупными подсистемами и более широкими аспектами поведения всей системы в целом, т.е. чем выше уровень, тем больше общность отображения объекта управления;
более высокий уровень управления имеет больший период выработки управляющего решения из-за необходимости сбора и обработки большего количества разнородной информации;
чем выше уровень управления, тем больше неопределенностей в выработке математически точной программы управления объектом.
Основным видом управления в иерархических системах является программное (командное) управление. Для эффективного функционирования систем при таком управлении необходима хорошо отлаженная технология информационного обмена между уровнями, позволяющая достаточно оперативно и полно отражать управляемый объект. Однако практически в сложной иерархической системе это сделать трудно и поэтому все недостатки в информационном обмене оборачиваются потерей эффективности управления.
Основні прийоми диспетчерського регулювання руху потягів.
Регулировочные мероприятия, проводимые в условиях устойчивой эксплуатационной работы
- Введение в график опаздывающих пассажирских поездов.
- Скоростной пропуск поездов по всему направлению
- Увеличение безостановочного пробега поездов.
- Повышение транзитности вагонопотоков.
- Ускорение перевозки грузов за счет увеличения веса и длины поездов
- Оперативная корректировка плана формирования.
- Улучшение использования локомотивов и локомотивных бригад
Схеми інформаційних моделей системи керування станцією.
Действительно, чтобы принять решение об установке того или иного маршрута, предварительно необходимо оценить ситуацию на станции по многим составляющим технологического процесса. Поскольку конечной целью перевозочного процесса является целенаправленное перемещение подвижных единиц (поездов, вагонов, локомотивов), для организации любого перемещения исходным является точное знание места, назначения и состояния каждой единицы, технологического состояния систем и подразделений, т.е. полное информационное описание объектов управления (моделирование).
Рис.1.3. Схема информационных моделей системы управления станцией.
Таким образом, при диспетчерском управлении движением на станции или участке в системе должны быть следующие информационные модели (рис. 1.3): поездная, вагонная, локомотивная, технологического состояния станции и состояния путевых объектов (стрелок, светофоров и т.д.). На основе оценки ситуации по этим моделям может быть выбрано управляющее решение, конечно же, более эффективное, чем при использовании информации только о состоянии путевых объектов.
Який вид керування диспетчерською централізацією є більш перспективним: комп’ютерне керування, чи керування оператора.
Таким образом, для автоматизации управления движением необходимы технические средства, отражающие состояние станции или участка по всем технологическим составляющим. Исходя из этого, можно решать вопрос и о том, какая система диспетчерского управления лучше — автоматическая или автоматизированная?
Принципиальным различием между ними следует считать способ принятия управляющего решения в системе. В автоматической системе решение выбирает техническое устройство (ЭВМ и т.п.), а в автоматизированной эти функции выполняет человек. Разумеется, в автоматизированной системе и некоторые другие функции могут выполняться человеком, т.е. распределение обязанностей между человеком и техническими средствами может быть различным, но главное — как принимаются решения?
Нетрудно заметить, если на входе решающего устройства состояние объекта управления представлено точно и эта ситуация стандартная (предусмотренная), то в подобных условиях решения техническим устройством будут приниматься оперативнее. В тех же случаях, когда формализованное информационное описание состояния объекта управления в системе не является полным и для снятия неопределенности в ситуации требуется привлечение дополнительных данных из других источников, то управляющие решения, принимаемые человеком, оказываются лучше.
В системах диспетчерского управления наиболее перспективно комбинированное управление, т.е. сочетание управляющей ЭВМ с диспетчером-оператором. В этом случае ЭВМ должна оперативно выполнять наиболее трудоемкую работу по оценке входной информации и выдавать оператору рекомендации (советы) по управлению, которые могут быть приняты или отвергнуты им с учетом известной ему дополнительной неформализованной информации.
В стандартных ситуациях из режима совета ЭВМ легко может быть переведена в режим автоматического управления. Однако предпочтительнее все же сохранять за оператором функции окончательного выбора управляющего решения, так как для обратного перехода от автоматического управления потребуется значительное время на восприятие оператором сложившейся ситуации в системе.
Таким образом, введение средств автоматизации диспетчерского управления объективно ведет к расширению зоны управления из одного пункта.
При ДЦ имеется возможность управления объектами ЭЦ: диспетчером с центрального пульта; с местного пульта ЭЦ (резервное); с маневровых колонок (местное). Работа с резервного пульта или местное управление возможны только с разрешения диспетчера.
Типи керування станцією.

Що таке ТУ, ТС, ТІ. Чим вони. відрізняються?
В зависимости от назначения передаваемой информации принято различать телемеханические системы телеуправления (ТУ), телесигнализации (ТС) и телеизмерения (ТИ)
Структурна схема системи керування. Призначення кожного блоку.

Структурна схема системи місцевого керування. Її переваги та недоліки.
При местном способе информационные преобразования осуществляются только в пункте управления и в результате выработанных команд

Рис. 2.2. Структурная схема местного управления
на объекты управления по индивидуальным линейным проводам подается вся энергия, необходимая исполнительным механизмам (рис. 2.2).
Контроль состояния исполнительных механизмов выполняется по отдельным проводам и используется энергоресурс пункта управления. Такой способ взаимодействия с объектом является основным в системах электрической централизации с центральными зависимостями и центральным питанием.
Основные недостатки, ограничивающие область использования рассмотренного способа: небольшая дальность управления (единицы километров) и большой расход кабеля с различным поперечным сечением проводов (в зависимости от передаваемой мощности) для индивидуальных цепей.
Структурна схема системи дистанційного керування. Її переваги та недоліки.
Отмеченные недостатки менее ощутимы при использовании так называемого дистанционного способа управления объектами (рис. 2.3).

Рис. 2.3. Структурная схема дистанционного управления
При этом способе пункт управления (ПУ) взаимодействует с устройствами контролируемого пункта (КП) только на уровне информационного обмена по индивидуальным для каждого сообщения линейным проводам.
Исполнительные механизмы получают необходимую энергию от местного источника в соответствии с командами пункта управления. Сравнительно небольшие мощности передаваемых информационных сигналов позволяют существенно увеличить дальность управления и сократить расход кабеля на организацию взаимодействия в системе. Дистанционный способ получил широкое распространение в системах электрической централизации с местным питанием и в устройствах перегонной автоматики
Структурна схема системи телемеханічного керування. Її переваги та недоліки.
 |
С увеличением зоны управления, т.е. с ростом числа групп объектов и расстояний между ними, в системе управления используют телемеханические способы взаимодействия (рис. 2.4). Такой способ обмена информацией в системах управления обеспечивает передачу всей совокупности сообщений между пунктами по общей линии (каналу) связи при энергетической независимости каждого пункта при энергетической независимости каждого пункта.
Рис. 2.4. Структурная схема телемеханического управления
Таким образом, основу телемеханики составляют устройства, позволяющие различными способами независимо передавать многие дискретные сообщения по общим линиям связи любой протяженности.
(((Б)))Структурна схема системи телесигналізації . Призначення кожного блоку.
(((В)))Структурна схема системи телевимірювання . Призначення кожного блоку.
(((А)))Структурна схема системи телекерування . Призначення кожного блоку.
Організація телемеханічних сигналів.
Источники информации разнообразны, рассредоточены в пространстве, могут иметь детерминированное и неопределенное число состояний. Соответственно и организация устройств телемеханики различна для сосредоточенных и рассредоточенных объектов, для отражения их дискретного или непрерывного множества состояний. Любое изменение внутреннего состояния объектов контроля принято считать событием. О каждом событии контролирующий пункт должен получить сообщение. Сообщение, порожденное событием на передающем конце, должно быть, определенным образом доставлено получателю. Передача сообщений в системах телемеханики происходит по каналам связи, где в роли переносчика сообщений выступает переменный или постоянный ток. Поэтому переносчик с нанесенным на него сообщением уже представляет собой сигнал. Разумеется, что каждое сообщение образует свой собственный сигнал, отличный от других. Это необходимо для различения сообщений на приемном конце по виду сигналов.
Структурні схеми телемеханічних мереж.

Сигнали, імпульси, імпульсні ознаки. Визначення та призначення в телемеханічних системах.
Передача сообщений в системах телемеханики происходит по каналам связи, где в роли переносчика сообщений выступает переменный или постоянный ток. Поэтому переносчик с нанесенным на него сообщением уже представляет собой сигнал. Разумеется, что каждое сообщение образует свой собственный сигнал, отличный от других. Это необходимо для различения сообщений на приемном конце по виду сигналов.
Интервал времени, в течение которого признак переносчика не меняется, называют импульсом сложного сигнала,а используемые характеристики переносчика — импульсными признаками.
Любой сложный сигнал на приемном конце может быть правильно понят, если будет выделен каждый импульс сигнала и произойдет запоминание его качества (т.е. импульсного признака) на время, достаточное для определения известных приемнику свойств всей совокупности импульсов сложного сигнала.
Що таке кодування та декодування. Для чого потрібні інформаційні перетворювачі.
Процесс образования сложного сигнала, соответствующего определенному сообщению, называют кодированием,а обратные преобразования на приемном конце — декодированием.
Первичные преобразователи, реагирующие на изменение физического параметра (механического, электрического, оптического, теплового, химического и т.п.) источника сообщений, принято называть датчиками,а все последующие — информационными преобразователями.
В любом преобразователе происходит отображение множества входных сигналов в эквивалентное множество выходных с изменением формы представления сигналов. Это позволяет любую систему телемеханики рассматривать как определенную последовательность информационных преобразователей, видоизменяющих сигналы. Например, сигналы х2 , с выходов датчиков (рис. 2.7) в кодирующем устройстве преобразуются в форму х3, удобную для согласования с возможностями канала, после чего модулятор преобразует кодированную запись сообщения х1, в линейный сигнал х4, т.е. выполняет модуляцию переносчика в соответствии с передаваемым сообщением. На приемном конце проводятся обратные преобразования сигналов для представления информации в наиболее удобной форме.

Рис. 2.7. Схема информационных преобразований в системах
Таким образом, для каждого преобразователя нужно уметь задавать взаимосвязь между входами и выходами в соответствующей математической форме, а также описывать сигнал любого вида.
Схема інформаційних перетворень в системах телемеханіки. Призначення кожного блоку.
В любом преобразователе происходит отображение множества входных сигналов в эквивалентное множество выходных с изменением формы представления сигналов. Это позволяет любую систему телемеханики рассматривать как определенную последовательность информационных преобразователей, видоизменяющих сигналы. Например, сигналы х2 , с выходов датчиков (рис. 2.7) в кодирующем устройстве преобразуются в форму х3, удобную для согласования с возможностями канала, после чего модулятор преобразует кодированную запись сообщения х1, в линейный сигнал х4, т.е. выполняет модуляцию переносчика в соответствии с передаваемым сообщением. На приемном конце проводятся обратные преобразования сигналов для представления информации в наиболее удобной форме.

Рис. 2.7. Схема информационных преобразований в системах
Таким образом, для каждого преобразователя нужно уметь задавать взаимосвязь между входами и выходами в соответствующей математической форме, а также описывать сигнал любого вида.
Що таке систематичні коди.
Самый большой класс разделимых кодов составляют систематические коды, у которых значения проверочных символов определяются в результате проведения линейных операций над определенными информационными символами.
Для случая двоичных кодов каждый проверочный символ выбирается таким образом, чтобы его сумма с определенными информационными символами равнялась нулю.
Число проверочных равенств (т.е. количество проверочных символов) и номера конкретных информационных разрядов, входящих в каждое равенство, определяется тем, какие и сколько ошибок должен исправлять и обнаруживать данный код. Проверочные символы могут располагаться в любом месте кодовой комбинации (К.К.).
При декодировании определяется справедливость проверочных равенств. В случае двоичных кодов это сводится к проверке на четность единиц среди символов, входящих в каждое из равенств (включая и проверочные символы). Совокупность проверок дает информацию о том – имеется ли ошибка, а в случае необходимости о том – на каких позициях символы искажены. Любой двоичных систематический код является групповым кодом, т.к. его К.К. образуют "группу".
Що таке коректуючи коди.
Корректирующие коды помехоустойчивые коды, коды обнаружения и исправления ошибки, Коды, позволяющие по имеющейся в кодовой комбинации избыточности обнаруживать и исправлять определённые ошибки, появление которых приводит к образованию ошибочных или запрещенных комбинаций. Применяются при передаче и обработке информации в вычислительной технике, телеграфии, телемеханике и технике связи, где возможны искажения сигнала в результате действия различного рода помех. Кодовые слова К. к. содержат информационные и проверочные разряды (символы). В процессе кодирования при передаче информации из информационных разрядов в соответствии с определёнными для каждого К. к. правилами формируются дополнительные символы — проверочные разряды. При декодировании из принятых кодовых слов по тем же правилам вновь формируют проверочные разряды и сравнивают их с принятыми; если они не совпадают, значит при передаче произошла ошибка. Существуют коды, обнаруживающие факт искажения сообщения, и коды, исправляющие ошибки, т. е. такие, с помощью которых можно восстановить первичную информацию.
Що таке лінійні коди.
В области математики и теории информации линейный код — это важный тип блокового кода, использующийся в схемах определения и коррекции ошибок. Линейные коды, по сравнению с другими кодами, позволяют реализовывать более эффективные алгоритмы кодирования и декодирования информации. Линейный код длины n и ранга k является линейным подпространством C размерности k векторного пространства  , где
, где  — конечное поле из q элементов. Такой код с параметром q называется q-арным кодом (напр. если q = 5 — то это 5-арный код). Если q = 2 или q = 3, то код представляет собой двоичный код, илитернарный соответственно.
— конечное поле из q элементов. Такой код с параметром q называется q-арным кодом (напр. если q = 5 — то это 5-арный код). Если q = 2 или q = 3, то код представляет собой двоичный код, илитернарный соответственно.
Линейный (блоковый) код — такой код, что множество его кодовых слов образует  -мерное линейное подпространство (назовем его
-мерное линейное подпространство (назовем его  ) в
) в  -мерном линейном пространстве, изоморфное пространству -битныхвекторов.
-мерном линейном пространстве, изоморфное пространству -битныхвекторов.
Это значит, что операция кодирования соответствует умножению исходного -битного вектора на невырожденнуюматрицу  , называемую порождающей матрицей.
, называемую порождающей матрицей.
Структурні схеми кодуючи пристроїв для лінійних кодів. Принцип роботи.
Що таке циклічні коди.
Циклический код — линейный код, обладающий свойством цикличности, то есть каждая циклическая перестановка кодового слова также является кодовым словом. Используется для преобразования информации для защиты её от ошибок
Як будуються коди з постійною вагою.
Этот код содержит постоянное число единиц и нулей. Число кодовых комбинаций составит 
Пример 5.2. Коды с двумя единицами из пяти и тремя единицами из семи.

| 
|
Этот код позволяет обнаруживать любые одиночные ошибки и часть многократных ошибок. Не обнаруживаются этим кодом только ошибки смещения, когда одновременно одна единица переходит в ноль и один ноль переходит в единицу, два ноля и две единицы меняются на обратные символы и т.д.
Рассмотрим код с тремя единицами из семи. Для этого кода возможны смещения трех типов.


Вероятность появления не обнаруживаемых ошибок смещения
 , где
, где 


При p<<1  , тогда
, тогда 
Вероятность появления всевозможных ошибок как обнаруживаемых, так и не обнаруживаемых будет составлять 
Вероятность обнаруживаемых ошибок  . Тогда коэффициент обнаружения будет равен
. Тогда коэффициент обнаружения будет равен 
Например, код  при
при  коэффициент обнаружения составит
коэффициент обнаружения составит  , избыточность L=27%.
, избыточность L=27%.
Що таке кореляційні коди.
Под корреляционными подразумевают коды, обладающие хорошими корреляционными свойствами, важными при передаче сигналов вхождения в связь, для повышения защищенности от некоторых видов помех, извлечения сигналов из интенсивных шумов, обеспечения многостанционного доступа, построения асинхронно-адресных систем связи. Корреляционные коды включают в себя пары противоположных сигналов с хорошей функцией автокорреляции (метод внутриимпульсной модуляции), импульсно-интервальные коды, имеющие на фиксированном интервале времени постоянное для всех слов кода число импульсов с неперекрывающимися (при любом взаимном сдвиге слов во времени) значениями интервалов между импульсами, ансамбли сигналов с хорошими взаимокорреляционными свойствами.
Характеристики каналу і сигналу. Як вони взаємопов’язані.
Физические характеристики канала и сигнала.Обычно телемеханические сигналы передаются посылками электрического тока по проводным линиям связи, но иногда используется и радиоканал. В обоих случаях перенос электромагнитной энергии сигналов непосредственно зависит от свойств канала. Из множества этих свойств три параметра, произведение которых составляет объем (емкость) канала, характеризуют его количественные возможности:

где: Тк - время, на которое канал предоставлен отправителю сообщения; Fк - полоса частот пропускания канала; Нк - допустимая электрическая мощность сигнала, передаваемого по каналу.
Аналогично может быть представлен и объем передаваемого сигнала, т.е.

где: Тс - длительность импульса сигнала; Fс - ширина спектра частот сигнала; Hс=logPс/Pn – превышение уровня сигнала рс над уровнем помех рп
Нормальная передача сигналов возможна только при правильном согласовании Vс и Vк. Это означает, что всегда должно выполняться не только условие Vс ≤ Vк, но и Тс ≤ Тк, Fс ≤ Fк, Нс ≤ Hк.
Таким образом, согласование сигнала с каналом сводится к уменьшению одного параметра (Т, F, Н) и пропорциональному увеличению другого с сохранением общего объема Vс ≤ Vк. Подобные преобразования проводятся при выборе способа передачи сигналов по данному каналу. Однако кодирование может изменять исходный объем сигналов, подлежащих передаче. Вместе с этим изменяются эффективность и помехоустойчивость передачи.
Следует подчеркнуть, что Vк характеризует максимальное количество информации, которое можно передать по каналу за время Тк, при заданных ограничениях мощности передаваемого сигнала. По определению К.Э. Шеннона, максимальная скорость передачи информации при рс ” рп
 |
Использование канала для передачи максимального объема информации с требуемой достоверностью –
основная задача при создании любой системы телемеханики. Имеются различные подходы для достижения максимального использования возможностей канала по Fк и Тк при постоянном Hк.
Часове й частотне розділення сигналів. Переваги кожного методу.
Частотное разделение сигналов. Для каждого из n - сигналов выдается своя полоса в частотном диапазоне. На приемном пункте (КП) каждый из посланных сигналов выделяется сначала полосовым фильтром, затем подается на демодулятор, затем на исполнительные реле. Можно передавать сигналы последовательно или одновременно, т.е. параллельно.
Временное разделение (ВР). Каждому из n - сигналов линия предоставляется поочередно: сначала за промежуток времени t1передается сигнал 1, за t2 - сигнал 2 и т.д. При этом каждый сигнал занимает свой временной интервал. Время, которое отводится для передачи всех сигналов, называется циклом. Полоса частот для передачи сигналов определяется самым коротким импульсом в кодовой комбинации. Между информационными временными интервалами необходимы защитные временные интервалы во избежание взаимного влияния канала на канал т.е. проходных искажений.
Для осуществления временного разделения используют распределители, один из которых устанавливают на пункте управления, а другой - на исполнительном пункте.
Що таке модуляція та маніпуляція. Чим вони відрізняються. Глибина модуляції.
Импульсные признаки. Модуляция.Каждый телемеханический канал связи рассчитан на передачу импульсов постоянного или временного тока. Но для того чтобы передаваемые импульсы являлись сигналами, т.е. несли полезную информацию о событиях передающем конце, они должны быть различимы. Различение импульсов может осуществляться по определенным признакам, которые называют импульсными. В качестве таких признаков могутвыступать любые параметры постоянного или переменного тока (переносчика), изменяемые по определенным правилам. Процесс изменения параметров переносчика информации принято называть модуляцией. Если в системе телемеханики используются только два дискретных значения параметра переносчика, соответствующих логическим 0 и 1 , такой процесс называют манипуляцией. Глубиной модуляции является степень изменения модулируемого параметра.
Принципы модуляции зависят от вида тока переносчика (синусоидальный или постоянный).
 |
Переменный ток в любой момент времени характеризуется амплитудой, частотой и фазой:
где: Im - максимальная амплитуда тока; w=2p¦- частота; y - начальный фазовый угол.
 Поэтому импульсные признаки и принципы модуляции могут быть амплитудными, частотными, фазовыми и производными от них.
Поэтому импульсные признаки и принципы модуляции могут быть амплитудными, частотными, фазовыми и производными от них.
Що таке амплітудна модуляція. Переваги та недоліки. Де використовується.
Амплитудная модуляция (АМ) характеризуется изменением амплитуд переносчика в соответствии с законом изменения состояния источника сообщений (рис. 2.23, а). Принципиально важным для АМ является выбор несущей частоты. Она должна быть значительно больше частоты изменения модулирующего сигнала. При передаче непрерывных сигналов (например, телеизмерения) число градаций амплитуд бесконечно, а при передаче дискретных сигналов выбираются два значения с максимально возможными различиями для уменьшения вероятности ошибок. Однако амплитудные импульсные признаки по сравнению с другими обладают малой помехоустойчивостью.
Рис. 2.23. Амплитудная, частотная и фазовая модуляции
Що таке частотна модуляція. Переваги та недоліки. Де використовується.
Частотная модуляция(ЧМ) представляет собой изменение несущей частоты в соответствии с передаваемым сообщением (рис. 2.23, б). Если модулирующая функция f(t) непрерывна, то
где: w0 — исходная частота несущей; Δw — предельное изменение (девиация) частоты модуляции.
Що таке фазова модуляція. Переваги та недоліки. Де використовується.
Фазовая модуляция(ФМ) представляет собой изменение фазы несущего колебания во времени в соответствии с модулирующим сигналом φ = φ0 + ∆ φf(t) (рис. 2.23, в), т.е. при ФМ
 |
Частотная и фазовая модуляции связаны с изменением угла несущей частоты, поскольку нет изменения частоты без изменения фазы и наоборот, т.е.

 Разница между этими видами модуляции лишь в характере изменения угла. Так, при ФМ мгновенная частота изменяется прямо пропорционально производной модулирующей функции, а при ЧМ - пропорционально самой модулирующей функции f(t) или, что то же самое, при ФМ фаза меняется линейно с модулирующей функцией, а при ЧМ - линейно с интегралом модулирующей функции f(t).
Разница между этими видами модуляции лишь в характере изменения угла. Так, при ФМ мгновенная частота изменяется прямо пропорционально производной модулирующей функции, а при ЧМ - пропорционально самой модулирующей функции f(t) или, что то же самое, при ФМ фаза меняется линейно с модулирующей функцией, а при ЧМ - линейно с интегралом модулирующей функции f(t).
Если в качестве переносчика информации использовать постоянный ток, то модулировать его можно по амплитуде, направлению тока (полярность импульсов (рис.2.24).
Помимо рассмотренных основных параметров переменного и постоянного тока, используемых в качестве импульсных признаков, возможно еще модулирование по относительным признакам импульсов, следующих друг за другом. Такая модуляция может осуществляться импульсами постоянного и переменного тока.
Що таке відносна фазова модуляція. Переваги та недоліки. Де використовується.
в устройствах телемеханики широко используют способ так называемой относительной фазовой модуляции(ОФМ). Суть этого способа сводится к следующему. Для передачи двоичных символов служат три значения фазы: φ1 , φ2 и φ3 , но сигнальное значение имеют только переходы от одной фазы к другой. Например, для передачи 1 используют переходы φ1→ φ2→ φ3→ φ1 а для передачи 0 - обратные переходы φ1→ φ3→ φ2→ φ1. Поскольку значение принятого сигнала определяется по текущему значению фазы колебания относительно фазы в предыдущем такте работы устройства, метод получил название ОФМ.
Другими примерами относительных модуляций являются способы время-импульсной модуляции и ее разновидностей: фазоимпульсной и частотно-импульсной модуляций.
Що таке часова імпульсна модуляція (ВІМ). Її переваги над часовою модуляцією.
Времяимпульсная модуляция(ВИМ) предполагает, что временной интервал между опорным (тактовым) и сигнальным импульса-
ми изменяется пропорционально модулирующей функции (рис. 2.25, а). При фазоимпульсной модуляции (ФИМ) сигнальные импульсы занимают определенную позицию (фазу) по отношению к опорным тактовым импульсам. Внешне ФИМ сходна с ВИМ, разница заключается лишь в глубине модуляции при изменениях модулирующей функции.
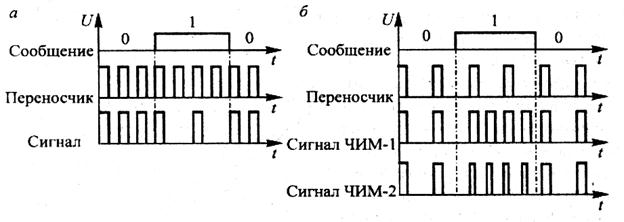
Рис. 2.25. Времяимпульсная и частотно-импульсная модуляции
Що таке частотно імпульсна модуляція (ЧІМ). Її переваги над часовою модуляцією.
Частотно-импульсная модуляция (ЧИМ) характеризуется изменением частоты следования импульсов в соответствии с изменением модулирующей функции (рис. 2.25, б). При ЧИМ возможно изменение как частоты при постоянной скважности (ЧИМ-2), так и скважности при постоянной длительности импульсов (ЧИМ-1).
Рассмотренные способы модуляции в некоторых системах используются в комбинациях, т.е. для повышения помехоустойчивости передачи или более эффективного использования канала применяют двойную или тройную модуляцию переносчика (АМ—ЧМ. ФИМ—ЧМ—АМ и т.п.). Устойчивость приема модулированных сигналов существенно зависит от того, сколько значений (градаций) имеют сигналы. Если модулирующая функция непрерывная, то и модулируемый параметр переносчика в некотором диапазоне может принимать любое значение. Разумеется, в этом случае при приеме сигналов труднее обнаружить искажения. Передача дискретных сигналов обладает целым рядом преимуществ перед передачей непрерывных сигналов, особенно по помехоустойчивости и простоте реализации.
Що таке ІКМ. Принцип роботи системи при використанні.
Дискретные сигналы по отсчётам непрерывных функций обычно образуются методами импульсно-кодовой модуляции (ИКМ).
Суть ИКМ (или КИМ — кодово-импульсной модуляции) сводится к тому, что каждому квантованному уровню параметра противопоставляется определенная кодовая комбинация, передаваемая в канал связи. Вид кода может быть различным. Длительность наиболее короткого импульса определяет необходимую полосу частот.
Дискретизація та квантування. Шляхи підвищення правильності передачі інформації.
 Дискретизация и квантование.Для передачи дискретных сигналов, отражающих изменения какой-либо непрерывной функции во времени, необходимо провести дискретизацию этой функции по времени и квантование по уровню (рис. 2.26).
Дискретизация и квантование.Для передачи дискретных сигналов, отражающих изменения какой-либо непрерывной функции во времени, необходимо провести дискретизацию этой функции по времени и квантование по уровню (рис. 2.26).
Дискретизация по времени дает возможность передавать значения функции только через определенные промежутки времени Δt. Дискретизация функции по передаваемому параметру (квантование) обеспечивает возможность передачи определенных фиксированных уровней, в пределах которых происходит изменение функции. Один уровень от другого отличается на определенную величину Δq.
Значения Δt и Δq определяют точность передачи функции, поэтому для их выбора существуют определенные правила. Обычно при квантовании уровня измеряемого параметра по оси ординат откладывают отрезки Δq (шаг квантования) и через эти точки проводят линии, параллельные оси времени. По оси времени откладывают отрезки Δt (шаг дискретизации) и по концам этих отрезков проводят линии, параллельные оси ординат. Таким образом, дискретизируемая непрерывная функция оказывается покрытой сеткой с ячейками Δt х Δq.
Те ячейки, через которые проходит функция, подлежат рассмотрению для организации передачи дискретных сигналов, отражающих значения этой функции с определенным приближением.
Для передачи в выбранные моменты времени должны приниматься значения функции, ближайшие к ее дискретным значениям. Поскольку непрерывная функция в результате дискретизации заменяется ступенчатой ломаной линией, то, естественно, возникают ошибки в ее отображении, зависящие от шага квантования по уровню Δq и дискретизации по времени Δt.
Если рассматривать отклонения в определении значения функции по каждому направлению дискретизации, нетрудно заметить, что максимальная ошибка будет наблюдаться при нахождении функции в центре шага, т.е. Δy=±Δq/2, Δx=±Δt/2
Суммарная ошибка дискретизации функции Δ =√Δx²+Δy².
Выбор шага дискретизации (квантования) функции существенно зависит от допустимых искажений в передаче ее исходных значений. Естественно, чем меньше шаг, тем меньше ошибка, но больше число передач. В связи с этим большое значение имеют методы оптимального выбора шага дискретизации непрерывных
Дата добавления: 2015-04-21; просмотров: 312; Мы поможем в написании вашей работы!; Нарушение авторских прав |
| <== предыдущая лекция | | | следующая лекция ==> |
| БИЛЕТ № 23. 1.Специфика социально-гуманитарного познания | | | Задания части А. Выберите одинответ, который является наиболее правильным |