КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Выбор ЭД. Режимы работы ЭД. Выбор мощности
Выбор ЭД является ответственным этапом в проектировании ЭП. От правильного выбора ЭД зависит не только экономичность ЭП, но и экономичность и надежность технологической установки (технологического процесса, рабочего механизма). Выбор ЭД предусматривает: 1) выбор рода тока и номинального напряжения, с учетом, что асинхронные двигатели являются самыми простыми, надежными; двигатели постоянного тока – самыми дорогими и сложными в эксплуатации; 2) выбор номинальной частоты вращения; 3) выбор конструктивного исполнения ЭД с учетом: а) защиты его от воздействия окружающей среды, б) способа охлаждения, в) способа монтажа и эксплуатации.
Режимы работы ЭП стандартизованы. Режим работы ЭД определяет характер изменения нагрузки. Режим работы ЭП (ЭД) – это определенный порядок чередования периодов, характеризуемых величиной и продолжительностью нагрузки, отключений, торможения, пуска и реверса за время работы. Для учета изменения нагрузки рассчитывают и строят нагрузочные диаграммы, которые являются зависимостью мощности, тока или вращающего момента двигателя от времени.
Различают следующие основные режимы работы ЭД: продолжительный (S1), кратковременный (S2) и повторно-кратковременный (S3). Продолжительный режим работы ЭД может быть при постоянной (вентиляторы, центробежные насосы, транспортеры) или переменной (ЭП металлорежущих станков) нагрузках. При постоянной нагрузке температура нагрева ЭД постепенно достигает установившегося значения, при котором двигатель может работать долгое время. Мощность ЭД в этом режиме можно рассчитать по формуле, кВт
Ррасч = 0,105×10-3Мсn / hмех,
где Ррасч – расчетная мощность, Мс – статический момент рабочего механизма, n – частота вращения, hмех – КПД передаточного устройства. При этом из выбранной серии выбирают ЭД, чтобы его номинальная мощность Рном ³ Ррасч.
При переменной нагрузке температура ЭД колеблется, но приблизительно может считаться неизменной. Расчет номинальной мощности при этом выполняют либо методом средних потерь, либо методом эквивалентных величин (мощности, тока, момента).
При повторно-кратковременном режиме работы периоды включения ЭД чередуются с периодами пауз tп, причем в период нагрузки температура нагрева двигателя не достигает установившегося значения, а при отключении не успевает достичь температуры охлаждающей среды.
Для выполнения контрольной работы (заочное отделение) и расчетно-графической работы (дневное отделение) нужно выполнить одно из заданий, приведенных в методических указаниях.
2.СОДЕРЖАНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
1. Титульный лист установленного образца.
2. Содержание.
3. Введение.
4. Необходимые графики, чертежи (эскизы) и схемы.
5. Исходные данные для расчета.
6. Расчетная часть с графиками и пояснениями.
7. Итоговые результаты работы.
8. Библиографический список.
3. ЗАДАНИЕ № 1 НА КОНТРОЛЬНУЮ РАБОТУ (РГР)
1. Выбрать участок технологического процесса с использованием электропривода – автоматизированного (АЭП) или неавтоматизированного. Дать краткое описание функционирования системы электропривода.
Пример. Привод тепловой пушки в цехе, электропривод компрессора тормозной системы, электропривод подъемного устройства, электропривод металлообрабатывающих станков, электропривод с тяговым двигателем, электропривод вентилятора, электропривода поворотного стола и др.
2. Разработать блок-схему системы электропривода на основе типовой блок-схемы, приведенной на рисунке 1.
3. Привести перечень устройств, входящих в выбранную систему ЭП
Пример. Устройства коммутации – контакторы, магнитные пускатели, реле управления, реостаты, тиристорные контакторы и т. п.
Информационные устройства = электромашинные датчики, исполнительные электромагнитные устройства, датчики температуры, емкостные датчики, датчики
скорости, угла поворота, муфты электроприводов и т. п.
Преобразовательные устройства ЭП – управляемые (изменяют выходные параметры: напряжение постоянного или переменного тока, число фаз, частоту переменного тока и др.) и неуправляемые преобразователи, электромашинные и полупроводниковые преобразователи.
3. Привести паспортные данные и тип используемого двигателя.
4. В зависимости от вида питания и типа двигателя привести типовую схему подключения.
Пример.


1) 2)
Рисунок 2- Схемы включения 1) трехфазных асинхронных двигателей с короткозамкнутым (а) и фазным (б) роторами и 2) ДПТ с параллельным возбуждением
5. Определить режим работы электропривода: длительный, кратковременный, повторно-кратковременный.
6. Построить нагрузочную диаграмму вида Р = f(t) с учетом технологического цикла работы электропривода.
Пример. Нагрузочная характеристика при длительном режиме работы – рисунок 3.
|

Рисунок 3- Нагрузочная диаграмма двигателя при длительном режиме работы
с изменяющейся нагрузкой
Нагрузочная диаграмма при повторно-кратковременном режиме – рисунок 4.
|

 t
t
Рисунок 4- Нагрузочная диаграмма ЭД при повторно-кратковременном режиме работы
7. Найти эквивалентную мощность ЭД для длительного режима работы по формуле
 ,
,
Переменная мощность нагрузки P(t) заменяется постоянной эквивалентной мощностью ЭД (расчеты рекомендуется округлять до десятых).
8. Используя справочную литературу [5] из условия Рном > Рэкв выбрать ближайший типоразмер двигателя.
9. Проверить выбранный ЭД на перегрузочную способность. Определить максимальную мощность по формуле
Рмах = 2×Рном.
10. Определить максимальную мощность нагрузки Рмах.нагр = Р3 (рисунок 3). ЭД способен работать с перегрузкой при условии
Рмах ³ Рмах.нагр.
При невыполнении условия работы с максимальной нагрузкой следует выбрать следующий по мощности типоразмер ЭД. Выполнения условия подтверждает правильность построения нагрузочной диаграммы.
11. Найти эквивалентную мощность для повторно-кратковременного режима работы (рисунок 4) по формуле (на интервале t3, обратите внимание, Р3=0).

12. Определить расчетное значение продолжительности включения
ПВ = (tp/tц) × 100%,
где tц = tр + tп = продолжительность цикла, tр – продолжительность работы, tп = паузы.
Так как ЭД выпускаются только для номинальных значений ПВ, выбрать ближайшее номинальное значение ПВном.
13. Определить расчетную мощность из соотношения
Ррасч = РэквÖ( ПВ / ПВном).
14. По справочной литературе [5] из условия Рном > Ррасч выбрать ближайший типоразмер двигателя.
15. Проверить выбранный ЭД на перегрузочную способность. Определить максимальную мощность по формуле
Рмах = 2×Рном.
16. Определить максимальную мощность нагрузки Рмах.нагр = Р1 (рисунок 4). ЭД способен работать с перегрузкой при условии
Рмах ³ Рмах.нагр.
При невыполнении условия работы с максимальной нагрузкой следует выбрать следующий по мощности типоразмер ЭД. Выполнение условия подтверждает правильность построения нагрузочной диаграммы.
4. ЗАДАНИЕ № 2 НА КОНТРОЛЬНУЮ РАБОТУ (РГР).
ИССЛЕДОВАНИЕ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
Основным средством приведения в движение рабочих машин является электрический двигатель, а, следовательно, основным типом привода служит электрический привод или электропривод (ЭП) [1, 4]. Наиболее широко используют системы автоматизированного электропривода (АЭП). Современные АЭП выполняют в виде замкнутых систем автоматического управления.
Основными управляемыми параметрами (координатами) электропривода принято считать частоту вращения, ток, момент, точность позиционирования (положение).
В качестве примера, рассмотрим электропривод с двигателем постоянного тока независимого возбуждения (ДПТНВ). Упрощенная электрическая схема системы управляемого ЭП постоянного тока с двигателем независимого возбуждения, включенного по системе «генератор двигатель» дана на рисунке 5. Якорь двигателя М непосредственно подсоединяют к якорю генератора G. Генератор G приводится в движение приводным (гонным) двигателем (на рисунке не показан). В промышленных условиях при наличии сети переменного тока в качестве приводного двигателя используют асинхронный короткозамкнутый двигатель. В автономных установках в качестве приводного двигателя используют двигатель внутреннего сгорания, паровую или газовую турбины и т. п. Регулируемой координатой является частота вращения wд двигателя М. Регулирование угловой скорости осуществляют изменением напряжения Uя на якоре двигателя. Сигнал по скорости wд измеряют тахогенератором BR, и в виде сигнала обратной связи Uос он поступает на вход управляющего устройства или регулятора, где сравнивается с сигналом задания Uзд, который формирует задатчик частоты вращения RР. На выходе узла сравнения определяют сигнал ошибки Uε = Uзд – Uос, который поступает на операционный усилитель, охваченный обратной связью из R и C элементов. Регулятор формирует управляющее воздействие Uу по определенному закону, которое поступает на усилитель мощности УМ, при этом изменяется напряжение Uв. на обмотке возбуждения генератора и в итогеизменяет напряжение на обмотке якоря двигателя, что в свою очередь приводит к изменению скорости вращения. К примеру, под действием нагрузки (возмущений) wд начинает снижаться, это приводит к уменьшению сигнала обратной связи по скорости Uос, а сигнал ошибки будет увеличиваться Uε = Uзд – Uос. При этом повышается напряжение на выходе регулятора Uу, на выходе УМ Uв и на якоре двигателя Uя, что приведет wд к заданному значению.
Рисунок 5 - Упрощенная принципиальная схема ЭП ДПТНВ с регулятором по скорости
RP - устройство сравнения, Р - регулятор, УМ - усилитель мощности, ОBG-обмотка
возбуждения генератора, G - генератор, М - двигатель, ОВМ - обмотка
возбуждения двигателя, BR – тахогенератор
Для регулирования параметров ЭП используют типовые законы регулирования: П–закон (пропорциональный), И–закон (интегральный), ПИ–закон (пропорционально интегральный), ПИД–закон (пропорциональный интегрально дифференциальный), А–закон (апериодический). Схемы П и ПИ регуляторов приведены на рисунке 6.
Включить выбранный регулятор в систему управляемого ЭП и привести полученную схему в пояснительной записке.

Рисунок 6 - Схема П и ПИ регуляторов, DA - операционный усилитель
По принципиальной схеме системы автоматизированного ЭП с ДПТНВ необходимо составить структурную схему (рисунок 7). В структурной схеме каждый элемент электропривода представлен передаточной функцией (ПФ) Wi(s), где s – аргумент преобразования Лапласа.


Рисунок 7 - Структурная схема электропривода с ДПТНВ
Для анализа системы управления ЭП используют аппарат теории управления [2, 3]. Систему автоматического управления ЭП исследуют на устойчивость и определяют показатели качества. Устойчивость и качественные показатели работы системы АЭП определяют по переходному процессу. Построение переходного процесса является достаточно трудоемкой процедурой. Однако существуют косвенные методы или критерии для определения устойчивости и качественных показателей.
Передаточные функции типовых элементов ЭП с ДПТНВ приведены в таблице 1.
Выражения передаточных функций Wi(s) Таблица 1
| Wум(s) | Wг(s) | Wд(s) | WBR(s) | Wпи(s) | Wп(s) |
| Kyм | 
| 
| 
| 
| Kп |
Значения коэффициентов и постоянных времени ПФ Wi(s) элементов ЭП даны в таблице 2.
Значение коэффициентов и постоянных времени Таблица 2
| № | Kум | Kг | Tг | Tд | Kд | KBR | Kпи | Tпи | Kп |
| 1,4 | 2,8 | 0,15 | 1,4 | 1,0 | 0,75 | 0,6 | 6,0 | 0,7 | |
| 1,5 | 2,0 | 0,025 | 0,4 | 1,5 | 0,79 | 0,8 | 6,0 | 0,75 | |
| 1,08 | 2,0 | 0,18 | 0,9 | 1,4 | 0,88 | 0,03 | 15,0 | 0,9 | |
| 1,51 | 2,6 | 0,04 | 1,2 | 1,22 | 0,8 | 0,68 | 6,0 | 0,7 | |
| 0,98 | 1,8 | 0,18 | 0,8 | 1,1 | 0,58 | 0,6 | 20,0 | 0,87 | |
| 2,0 | 2,4 | 0,10 | 0,10 | 1,8 | 2,2 | 0,06 | 6,0 | 70,0 | |
| 1,2 | 2,6 | 0,16 | 0,12 | 1,1 | 2,0 | 0,01 | 6,0 | 80,0 | |
| 1,4 | 2,8 | 0,14 | 0,14 | 1,0 | 2,5 | 0,06 | 6,0 | 90,0 | |
| 1,2 | 2,0 | 0,20 | 0,20 | 1,2 | 2,7 | 0,10 | 5,8 | 70,0 | |
| 1,5 | 2,2 | 0,12 | 0,16 | 1,8 | 3,5 | 0,08 | 6,2 | 80,0 |
Для исследования системы ЭП на устойчивость можно использовать критерий Гурвица. Для применения критерия Гурвица нужно получить ПФ замкнутой системы. Прежде получим ПФ разомкнутой системы, для этого нужно разомкнуть контур регулирования по обратной связи, при этом элементы системы электропривода будут соединены последовательно. Эквивалентную ПФ разомкнутой системы определяют произведением ПФ элементов системы АЭП
 ,
,
где а и b –коэффициенты, r – число элементов (звеньев) разомкнутой системы ЭП, n = 1, 2, 3…, m = 1, s=jw, w – круговая частота.
Затем для применения критерия Гурвица находят ПФ замкнутой системы АЭП, которую определяют по формуле
 ,
,
где Wп.ц(s) = Wр(s)Wум(s)Wг(s)Wд(s) – ПФ прямой цепи.
Знаменатель ПФ Wзс(s)является характеристическим уравнением. Критерий Гурвица формулируется следующим образом. Для того чтобы система автоматического регулирования была устойчива, необходимо и достаточно, чтобы при  >0 все диагональные определители матрицы, составленной по определенному правилу из коэффициентов знаменателя (характеристического уравнения) ПФ замкнутой системы
>0 все диагональные определители матрицы, составленной по определенному правилу из коэффициентов знаменателя (характеристического уравнения) ПФ замкнутой системы  , были больше нуля. Из критерия Гурвица вытекает, что все коэффициенты характеристического уравнения устойчивой системы положительны.
, были больше нуля. Из критерия Гурвица вытекает, что все коэффициенты характеристического уравнения устойчивой системы положительны.
Правило составления определителя Гурвица сводится к следующему. Выписывают по главной диагонали все коэффициенты от a1 до an в порядке возрастания индексов. Дополняют столбцы вверх от коэффициентов диагонали, вписывая в столбец коэффициенты с последовательно возрастающими индексами. Вниз от коэффициентов диагонали дополняют столбцы коэффициентами с последовательно убывающими индексами. Вместо коэффициентов, индексы у которых могли бы быть больше n и меньше нуля, проставляют нули:

Для иллюстрации метода составим определитель для уравнения третьего порядка  из ПФ
из ПФ  (используется знаменатель):
(используется знаменатель):
 .
.
Диагональными определителями будут:

или  .
.
Для устойчивости системы третьего и четвертого порядков необходимо и достаточно, чтобы: а) все коэффициенты характеристического уравнения были положительны; б) все определители матрицы Гурвица были больше нуля.
Для построения переходного процесса можно использовать среду программирования VisSim (MathCad, ASOTAR и др.) [3]. Пример использования программы VisSim для моделирования и исследования АЭП показан на рисунке 8. По полученному переходному процессу определяют устойчивость системы ЭП (ПП затухающий) и показатели качества.
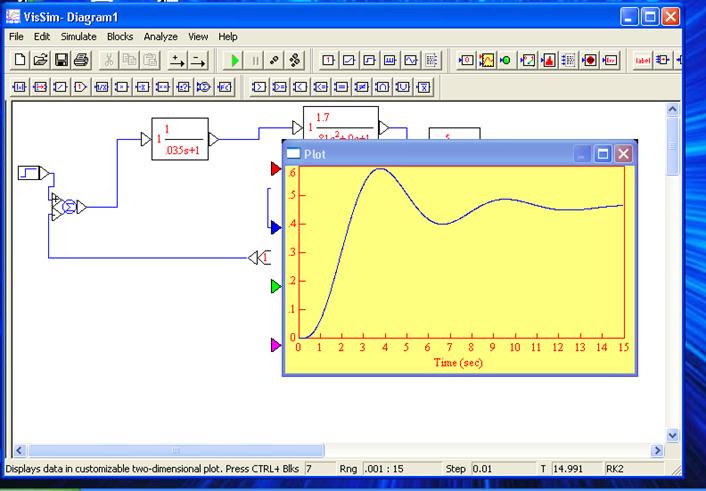
Рисунок 8 - Структурная схема электропривода с ДПТНВ в среде VisSim
Контрольные вопросы
1. Приведите схему обобщенной структуры ЭП.
2. Назовите основные критерии выбора ЭД для электроприводов.
3. Как осуществляется расчет мощности ЭД?
4. Назовите режимы работы ЭП.
5. Перечислите принципы построения управляемого ЭП.
6. Назовите основные регулируемые координаты ЭП.
7. Перечислите основные способы регулирования частоты вращения ДПТ.
8. Дайте понятие устойчивости системы АЭП.
9. Назовите методы расчета мощности ЭД при продолжительной переменной нагрузке.
10. Назовите типовые законы регулирования.
11. Назовите способы регулирования частоты вращения асинхронного двигателя.
Список литературы
1. Кацман, М. М. Электрический привод [Текст] : учеб. для студ. образоват. учреждений сред. проф. образования / Марк Михайлович Кацман. – М.: Издательский центр «Академия», 2005. – 384 с. ISBN 5-7695-2060-4
2. Макаров, И. М., Менский, Б. М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал) [Текст] : – 2-е изд., перераб. и доп. – М.: Машиностроение, 1982. – 504 с. : ил. – Библиогр.: с. 496–500. – Предм. указ. : с. 501–502. – 10000 экз.
3. Сазонов, В. В. Анализ и синтез автоматического управление электроприводом постоянного тока [Текст] : учеб. пособие. / Вячеслав Викторовч Сазонов. – Самара: СамГАПС, 2005. – 176 с. : ил. – Библиогр.: с. 170 – 172. – Предм. указ. : с. 173–174. – 150 экз. ISBN5-901267-50-50-8
4. Москаленко, В. В. Электрический привод [Текст] : учеб. пособие для студ. учреждений сред. проф. образования / Владимир Валентинович Москаленко. – М.: Мастерство: Высшая школа, 2000. – 368с. : ил. – Библиогр.: с. 361 – 362. – 30000 экз. (Мастерство).
5. Алиев, И. И. Справочник по электротехнике и электрооборудованию [Текст] (5-е изд., испр.) / Исмаил Ибрагимович Алиев Серия «Справочники». – Ростов н/Д: Феникс, 2004. – 480 с., ил.
Дата добавления: 2015-02-09; просмотров: 1513; Мы поможем в написании вашей работы!; Нарушение авторских прав |