КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ИЗМЕРЕНИЕ ЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН 1 страница
Г
Gt;М
D
_*2ном
| о— |
-с=ь
Рис. 2.10. Схема устройства однофазного индукционного счетчика:
| [Н |
| / |
1 — трехстержневой сердечник; 2 — счетный механизм; 3 — алюминиевый диск; 4 — постоянный магнит; 5 — П-образный сердечник
репленного на оси, и постоянного
магнита 4, служащего для создания тормозного момента.
Анализ работы индукционного счетчика показывает, что его вращающий момент пропорционален активной мощности переменного тока:
Мвр = Wcoscp = КХР,
где Кх — коэффициент пропорциональности; ф — угол сдвига фаз между напряжением U и током Г, Р — мощность.
Под влиянием Мвр диск счетчика начинает вращаться. На диск действует тормозной момент Мт, создаваемый постоянным магнитом, который упрощенно можно считать пропорциональным скорости вращения диска:
М1 = K2da/dt,
где К2 — постоянный коэффициент.
При неизменной активной мощности в цепи Мвр = Л/т. Тогда
КХР = K2du/dt. (2.30)
Выражение (2.30) можно представить в виде
KxPdt=K2da. (2.31)
Интегрируя (2.31) по времени от до t2, получим
'2 '2 Kx\Pdt = K2]da.
i\ t\
Тогда Kx W = K22nN, где W — активная энергия, учтенная счетчиком за время от до t2, N — число оборотов диска за время от до t2.
Следовательно,
W= K22nN/ K\ = CHOMN,
где CH0M = I/A — номинальная постоянная счетчика (количество энергии, учитываемой счетчиком за один оборот диска); А — передаточное число счетного механизма в виде числа оборотов, соответствующих единице энергии.
Количество электричества, реально прошедшее за один оборот диска, зависит от тока и характера нагрузки, внешних условий (например, от температуры и частоты), характеризуется действительной постоянной счетчика Сд, которая, как правило, не равна номинальной. Она определяется путем измерения действительно израсходованной энергии Wa за некоторое число оборотов диска N при помощи ваттметра и секундомера. В этом случае
Wn=Pt = CaN,
где Р — мощность, измеренная ваттметром; / — время.
Тогда
Сд = Pt/N.
Относительная погрешность счетчика, т. е. его класс точности (в%)
7отн = {{W- Wa)/Wa]m = [(Сном- Q/CJ100. (2.32)
Передаточное число счетчика А указывается на щитке счетчика. Значения А и Сном зависят только от конструкции данного счетчика и являются величинами постоянными.
Важный параметр счетчика — порог чувствительности, под которым понимается минимальная нагрузка, выражаемая обычно в процентах от номинальной, при которой подвижная часть начинает безостановочно вращаться.
Наряду с этим счетчик не должен иметь самоход при разомкнутой токовой цепи и изменении напряжения в пределах 220 В +10 %.
Счетчики активной энергии выпускаются классов точности 0,5; 1,0; 2,0; 2,5. Порог чувствительности счетчика не должен превышать 0,4 % для счетчиков класса точности 0,5 и 0,5 % для счетчиков класса точности 1,0; 2,0; 2,5.
Применение: для измерения электрической энергии в однофазных и трехфазных цепях.
2.3. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРИБОРЫ С ПРЕОБРАЗОВАТЕЛЯМИ
В соответствии с используемым преобразователем приборы называют выпрямительными, термоэлектрическими, электронными.
Выпрямительные приборы. Они представляют собой сочетание выпрямительного преобразователя и магнитоэлектрического ИП. В качестве преобразователей (выпрямителей) используются полупроводниковые выпрямители (диоды) на основе кремния или германия. В зависимости от числа применяемых диодов и схемы их включения осуществляется одно- и двухполупериодное выпрямление (преобразование) переменного тока. В цепи однополупери- одного выпрямления (рис. 2.11, а) ток через измеритель (микроамперметр), включенный последовательно с диодом VD1, протекает только в положительный полупериод напряжения £/(/). В отрицательный полупериод ток протекает через диод VD2. Подвижная часть магнитоэлектрического микроамперметра из-за своей инерционности реагирует на среднее значение момента
j т/7
мвр = — J m,dt, 1 о
где ш,— мгновенное значение вращающего момента.
Используя выражение (2.7), определим
1 772 1 Мвр=- j" BtSwi(t)dt = -BSwIcp,
о
где S — число витков.
| (2.33) |
Приравнивая Мвр к Мпр, получим выражение для функции преобразования прибора:
__ 1 BSw а~2 W ср'
Шкалу прибора градуируют обычно в действующих значениях синусоидального тока /д. Тогда выражение (2.33) принимает вид
| (2.34) |
| W |
| Ф |
BSw I n ^BSwI а = = 0,45-
W К,
где Кф = ///ср = 1,11 — коэффициент формы для синусоиды.
. , VD1 '
01 (имрп
VD2
-+3
а б

|
Рис. 2.11. Схемы включения прибора с однополупериодным (а) и двух- полупериодным (б) выпрямителями
В цепи двухполупериодного выпрямления (рис. 2.11, б) ток /„ протекает через микроамперметр в одном и том же направлении оба полупериода:
2 Т/2 J Т/2
Мвр=-J m,dt = - J B,Swi(t)dt = BSivIcp.
1 о -'о
Для этого случая функция преобразования прибора
а = 0,9 BSwI/W. (2.35)
Достоинства: высокая чувствительность, малое собственное потребление мощности, широкий частотный диапазон — возможность работы без частотной компенсации на частотах до 2000 Гц, с частотной компенсацией — до 20 кГц.
Недостатки: зависимость показаний от формы кривой измеряемого напряжения, необходимость введения частотной и температурной компенсации, невысокая точность (1,0; 1,5; 2,5; 4) из-за нелинейности вольт-амперных характеристик диодов.
Применение: выпрямительные приборы широко используют в качестве комбинированных приборов для измерения постоянных и переменных токов, напряжения и сопротивления — ампервольт- омметры (авометры). Диапазон измерений по току — 0,2 мА...6 А, по напряжению 0,2мВ...600 В.
Термоэлектрические приборы. Эти приборы представляют собой сочетание магнитоэлектрического механизма с отсчетным устройством и термоэлектрического преобразователя. Термоэлектрический преобразователь состоит из одной или нескольких термопар и нагревателя, по которому протекает измеряемый ток. Нагреватель обычно изготовляется из материала с большим удельным сопротивлением (нихром, константан, вольфрам) с допустимой температурой 600... 800 "С. Для термопары подбирают материалы, дающие в паре высокую термоЭДС, обладающие устойчивыми термоэлектрическими характеристиками (хромель — ко- пель, медь — копель и др.).
Различают контактные термоэлектрические преобразователи, у которых горячий спай термопары 2 приварен к нагревателю 1 (рис. 2.12, а), и бесконтактные термоэлектрические преобразователи (рис. 2.12, б), у которых нагреватель 1 и горячий спай разделены изолятором 3 (каплей стекла), что уменьшает чувствительность и увеличивает инерционность преобразователя. Преимуществом бесконтактных преобразователей является изоляция цепи термопары от нагревателя и возможность создания термобатарей (рис. 2.12, в).
Под действием теплоты, выделяемой нагревателем, и при разности температур горячего и холодного спаев термопары возникает термоЭДС Е, пропорциональная току 1Х, протекающему по нагревателю, и измеряемая магнитоэлектрическим ИМ.
Е Е
| Ж |
■2
1
о----- 1 1-------- о
/v ^х , ^х
а б в
Рис. 2.12. Контактные (а), бесконтактные (d) термопреобразователи и
термобатарея (в): / — нагреватель; 2 — термопара; 3 — изолятор
Достоинства: малое влияние частоты (и формы кривой) переменного тока; высокий частотный диапазон (10 Гц... 100 МГц); класс точности 0,5; 1,0 и ниже; диапазоны измерения по току 100 мА... 10 А, по напряжению 0,75...50 В; низкое входное сопротивление (200...300 Ом/В).
Недостатки: малая перегрузочная способность, зависимость показаний от температуры окружающей среды, низкая чувствительность, большое собственное потребление мощности, ограниченный срок работы, неравномерная шкала.
Применение: термоэлектрические приборы используются в качестве амперметров, вольтметров, ваттметров.
2.4. ИЗМЕРИТЕЛЬНЫЕ МОСТЫ И КОМПЕНСАТОРЫ
Измерение токов и напряжения приборами непосредственной оценки производится в лучшем случае с погрешностью 0,05 %. Более точное измерение этих величин возможно с помощью приборов сравнения — компенсаторов. В зависимости от вида измеряемого напряжения различают компенсаторы постоянного и переменного токов.
Компенсаторы постоянного тока (КПТ). Они используются для прямого измерения ЭДС и напряжений, а также косвенного измерения сопротивления, тока и мощности. Упрощенная принципиальная схема компенсатора с ручным управлением приведена на рис. 2.13.
На этой схеме можно выделить три контура: контур I нормального элемента, в который входят нормальный элемент EN, образцовое сопротивление RN и нуль-индикатор, в качестве которого используется гальванометр Г; контур II — рабочий, который содержит вспомогательный источник питания компенсатора Ек (до 2В), реостат для установки рабочего тока /?рс1, магазин сопротивлений RK и сопротивление RN\ контур III — измерительный, состоит из источника измеряемого напряжения Ux, нуль-индикатора и магазина сопротивлений RK.
У всех компенсаторов декады сопротивлений /?рег, RN, RK и переключатель П находятся внутри корпуса прибора, ручки рычаж-
ных переключателей декад Rper, RK располагаются на панели прибора. Источник питания компенсатора нормальный элемент EN, нуль-индикатор могут быть встроенными или подключаться снаружи к соответствующим зажимам. Измерение Ux осуществляется в два этапа. Сначала устанавливают ток /раб в рабочей цепи, значение которого строго определено и неизменно для каждого типа компенсатора. Для этого переключатель П переводят в положение /, и с помощью реостата йрег устанавливают такое значение тока /раб в цепи второго контура, при котором падение напряжения, создаваемое им на сопротивлении RN, будет равно ЭДС нормального элемента RN. При этом нуль-индикатор покажет отсутствие тока в цепи первого контура. Для этого случая
^раб Rn= EN- (2.36)
Затем приступают к измерению напряжения Ux. Для этого переключатель П устанавливают в положение 2 и регулировкой сопротивления RK добиваются компенсации напряжения Ux падением напряжения на участке г сопротивления RK от тока /раб. При этом нуль-индикатор покажет отсутствие тока в цепи третьего контура. С учетом выражения (2.36) можно записать
Ux=ENr/RN, (2.37)
где г — значение участка сопротивления RK при компенсации напряжения Ux.
Погрешность измерения напряжения компенсатором постоянного тока определяется в основном тремя факторами:
• погрешностью установки и поддержанием неизменным рабочего тока;
• погрешностью изготовления и подгонки образцового, компенсационного и регулируемого сопротивлений (RN, RK и /?рег);
• чувствительностью нуль-индикатора.
Существует девять классов точности компенсаторов постоянного тока: 0,0005; 0,001; 0,002; 0,005; 0,01; 0,02; 0,05; 0,1; 0,2.
| ________ D Контур Я п |
| ТС |
| Контур III П -о о------------- о о-1 + En- 12 + U- Рис. 2.13. Упрощенная принципиальная схема компенсатора постоянного тока |
| Контур / |
Различают высокоомные компенсаторы (10...40 кОм с пределом измерения до 1,9 В) и низкоомные (10... 1000 Ом с пределом измерения до 100 мВ). Для высокоомных компенсаторов в качестве нуль-индикатора используют гальванометры магнитоэлектрической системы с относительно большим критическим сопротивлением; для низкоомных — гальванометры с небольшим критическим сопротивлением.
Компенсаторы используют также для точных косвенных измерений токов и сопротивлений. Для измерения силы тока 1Х в исследуемую цепь включается образцовый резистор, сопротивление Ro которого известно с большой точностью, и компенсатором измеряется падение напряжения Ux на этом сопротивлении:
4= ux/R0.
Для измерения сопротивления резистора Rx последовательно с ним в исследуемую цепь включается образцовый резистор Rq. Измерив падение напряжения Щ на сопротивлении R0 расчетным путем, находят значение тока в исследуемой цепи / = U0/Rq. Затем, измерив падение напряжения Ux на сопротивлении Rx, получают расчетное значение искомого резистора Rx = RqUJUq.
Компенсаторы переменного тока. В таких компенсаторах для полного уравновешивания двух напряжений на переменном токе необходимо выполнить четыре условия: равенство напряжений по модулю, противоположность их фаз, равенство частот, одинаковая форма кривых Ux и UK.
Два первых условия обеспечивает конструкция компенсаторов. Третье условие выполняется при питании объекта измерения и компенсатора от одного источника. Четвертое условие осуществить практически невозможно, так как UK всегда синусоидально, a Ux может быть любой формы и полной компенсации достичь не удается, а уравновешивается первая гармоника. В качестве индикатора равновесия на промышленной частоте применяют вибрационный (резонансный) гальванометр. На более высоких частотах — электронные нуль-индикаторы, на звуковых — телефоны, усилители с выпрямительными приборами на выходе.
По способу компенсации неизвестного напряжения компенсаторы переменного тока делятся на два вида:
• полярно-координатные — с отсчетом измеряемого напряжения в полярных координатах (регулируется модуль UK и отдельно его фаза);
• прямоугольно-координатные — с отсчетом измеряемого напряжения в виде геометрической суммы двух взаимно-перпендикулярных составляющих.
Прямоугольно-координатный компенсатор (рис. 2.14) содержит два одинаковых реохорда — ab и cd, средние точки которых соединены электрически; воздушный трансформатор TV с взаимной индуктивностью обмоток М\ регулировочные реостаты 7?рС1 и Rf для установки рабочих токов реохорд ab и cd; амперметр А электродинамической системы класса 0,05 или 0,1; высокочувствительный нуль-индикатор НИ, например осциллографичес- кого типа.
По амперметру А реостатом Rpcl устанавливают рабочий ток /, реохорда ab. Под действием тока /,, протекающего по первичной
обмотке трансформатора, на вторичной обмотке наводится ЭДС, равная Е2 = у'соЛ//,. Ток 12 в цепи реохорда cd
h = Ei/(Red + Rf + juLi),
где Rcd — сопротивление реохорда cd, L2 — индуктивность вторичной обмотки трансформатора.
Ввиду незначительности реактивного сопротивления вторичной обмотки трансформатора coL2 « «(Red + Rf) фаза тока 12 практически совпадает с фазой ЭДС Е2. Следовательно,
/2 =p>MI]/(Rcd+ Rf). (2.38)
Множитель j в (2.38) означает, что ток /2 опережает ток /, на 90°. Равенство по модулю токов |/,| и |/2| устанавливается резистором R/.
12 = /,е>90.
Реохорды ab и cd равны по сопротивлению и длине, токи реохордов равны по величине и сдвинуты на 90°, а так как средние точки реохордов соединены электрически, то разность потенциалов между ними равна нулю. Таким образом, образуется прямоугольно-координатная система напряжений Uy и Ux с одинаковыми масштабами по осям.
Попеременно перемещая движки реохордов, добиваются нулевого показания нуль-индикатора, что соответствует полной компенсации активной и реактивной составляющих измеряемого напряжения.
Значение активной составляющей компенсирующего напряжения определяется по положению движка на шкале реохорда ab, а реактивной составляющей — по шкале реохорда cd. Тогда измеряемое напряжение Ux и начальная фаза фх находятся как
Ux = U\L + Uip, (рх = arctg UKmP/UKJl.
Знак начальной фазы фх определяется в зависимости от квадранта, в котором находится вектор компенсирующего напряжения UK в прямоугольной системе координат. Так как значение тока /2 зависит от частоты, то для его коррекции используется резистор Rf.
Недостатки: компенсаторы переменного тока уступают по точности компенсаторам постоянного тока.
 Рис. 2.14. Упрощенная принципиальная схема прямоугольно- координатного компенсатора
Рис. 2.14. Упрощенная принципиальная схема прямоугольно- координатного компенсатора
|
Автоматические компенсаторы постоянного тока. Процесс уравновешивания в таких компенсаторах производится автоматически.
Существуют компенсаторы с полным и неполным уравновешиванием. Промышленностью выпускаются автоматические компенсаторы, различающиеся габаритными размерами, видами записи, погрешностью, различным временем прохождения указателем всей шкалы.
Они применяются для измерения электрических и неэлектрических величин, которые могут быть предварительно преобразованы в напряжение или ЭДС постоянного тока. Применение автомагических компенсаторов постоянного тока существенно сокращает время измерений, но снижает их точность.
Мостовые схемы. Широкое применение мостовых схем объясняется высокой точностью измерений, большой чувствительностью и возможностью измерения различных параметров электрических цепей (R, L, С), а также величин, функционально с ними связанных (частоты, фазового угла) и ряда неэлектрических величин (температуры, давления, перемещений, усилий и т.д.).
Наиболее точные измерения сопротивлений Л" постоянному току выполняются с помощью мостов постоянного тока. Эти мосты делятся на две группы: одинарные (четырехплечие) и двойные (шестиплечие).
Одинарный мост, называемый мостом Уитсона, применяют для измерения сопротивлений от 1 Ом до 100 МОм; двойной мост, называемый мостом Томпсона, — для измерения малых величин сопротивлений — от 1 Ом и менее. В двойном мосте влияние величин, вызывающих погрешность измерения, сведено к минимуму.
Одинарный мост (рис. 2.15) состоит из четырех плеч: ab, be, cd и da. Три известных регулируемых сопротивления R2, Rs, вместе с измеряемым сопротивлением R{ = Rx образуют замкнутый четырехполюсник abed.
В измерительную диагональ моста bd включен указатель равновесия Г, в качестве которого используется магнитоэлектрический гальванометр. В диагональ питания моста ас включается источник постоянного тока — аккумуляторная батарея или сухой элемент. Подбором значений сопротивлений R2, R3, R4 добиваются отсутствия тока через гальванометр (потенциалы точек b и d равны) и, следовательно, IXRX = /4/?4; I2R2 - /3/?3.
Поскольку в момент равновесия моста ток через гальванометр не протекает (/г = 0), то 1Х = 12 и /3 = /4. Тогда правомерно записать Rx/R2 = R4/R3 или RXR3 = R2R4, откуда сопротивление
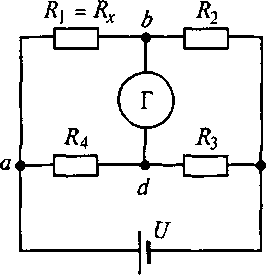 Рис. 2.15. Схема одинарного моста постоянного тока
Рис. 2.15. Схема одинарного моста постоянного тока
|
RX=R2R4/Ri. (2.39)
Сопротивления R2 и i?3 — известные фиксированные сопротивления в диапазоне 1... 1000 Ом. При этом отношение R2/R} = = 10"3... 103. Регулировкой сопротивления R4 уравновешивают мост. Погрешности измерения с помощью мостов постоянного тока зависят от диапазона измеряемых сопротивлений, наименьшие погрешности получают в диапазоне 100 Ом ... 100 кОм. По мере увеличения измеряемого сопротивления уменьшается чувствительность мостов, а при измерении больших сопротивлений сказывается влияние сопротивления изоляции.
Нижний предел измеряемых сопротивлений ограничен тем, что при измерении малых сопротивлений сказывается влияние сопротивления монтажных проводов и переходных контактов. Эти погрешности исключаются в двойном мосте (рис. 2.16), в котором используются резисторы й3 и R4, чтобы исключить влияние сопротивления соединительного проводника. Мост называется двойным, так как он содержит два комплекта плеч отношения.
При равновесии моста сопротивление Rx определяется выражением
| А Ri |
| Bl Ra |
| (2.40) |
| R2 r + Ri+R{ |
На практике значения Rb R2, R} и /^выбирают такими, чтобы выполнялось соотношение
Rx/R2 = R3/R4. (2.41)
При этих условиях вторым членом (2.40) можно пренебречь. Чтобы проверить выполнение условия (2.41), мост уравновешивается, а затем проводник г убирается, что не должно влиять на равновесие моста. Следовательно, двойной мост компенсирует малое сопротивление г.
На практике для исключения влияния соединительных проводов сопротивление резисторов Ru R2, и Л, выбирают более 10 Ом, а сопротивления Rx и Rq имеют токовые и потенциальные
зажимы и примерно один порядок величины. Чтобы исключить влияние тер- моЭДС, берут два отсчета при разных полярностях батареи, а затем усредняют результат.
В качестве нуль-индикаторов в мостах постоянного тока применяют высокочувствительные гальванометры или электронные устройства.

|
Двойной мост обеспечивает погреш- Рис. 2.16. Схема двойного ность менее 0,05 % для сопротивлений в моста постоянного тока диапазоне 10~6... 1 Ом.
Мосты переменного тока. Измерения сопротивления, индуктивности и емкости выполняются одинарными мостами на переменном токе (рис. 2.17).
Четыре плеча ab, be, cd и da моста тока образуются четырьмя комплексными сопротивлениями Z\ = Zx, Z2, Z3 и Z4. В одну диагональ моста включается источник питания переменного тока, в другую — нулевой индикатор НИ. При равновесии моста ток в измерительной диагонали равен нулю и, следовательно,
Z,Z3 = Z2Z4. (2.42)
Представив комплексное сопротивление Zb (2.42) в алгебраической форме, получим
(Я, +уХ,)(Л3 +]ХЪ) = (R2 +JX2)(R4 +JX4),
| (2.43) |
R\ Rj — X\Xy — R2Ra ~ X2X4; Я\ХЪ - R->,X\ = R}XA - R4X2, активные и реактивные составляющие сопротивле-
где Я, и X,- ния Z.
Записав (2.42) в показательной форме, получим равенство
г1гзеЛФ1+<й) = (2.44)
где ц— модуль /-го сопротивления; ф/ = arctg XJ R: — фазовый угол /'-го сопротивления.
| откуда |
Равенство (2.44) равносильно двум равенствам:
(2.45)
\Z1Z3 - Z2Z4 '■> |ф, +ф3 =ф2 + ф4.

|
| (2.46) |
| Рис. 2.17. Схема одинарного моста переменного тока |
| это означает, что если сопротивление Z2 индуктивного характера, т.е. Z2 = R2+ jX2, то сопротивление Z4 должно носить емкостный характер, т. е. Z, = /?4-уХ4 (рис. 2.18, а). |
Из (2.45) следует, что для уравновешивания моста с комплексными сопротивлениями необходима регулировка активной и реактивной составляющих. Равенство фаз (2.45) указывает, какими по характеру должны быть сопротивления плеч моста для обеспечения равновесия мостовой схемы. Например, если сопротивления плеч Z\ = R\, Z3 = i?3, т.е. носят чисто активный характер, то ф, = ф3 = 0. Тогда из (2.45) следует
ф2 + Ф4 = 0 или фг = - ф4,
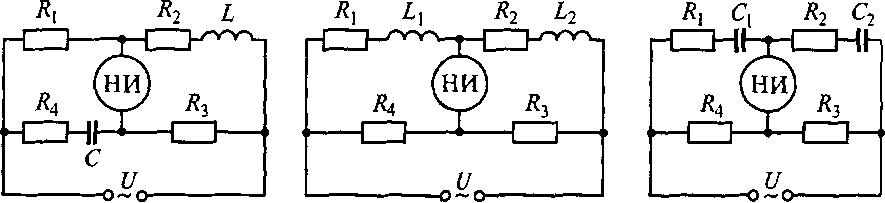 Рис. 2.18. Схемы мостов с реактивными сопротивлениями: в противоположных (а) и смежных (б, в) плечах
Рис. 2.18. Схемы мостов с реактивными сопротивлениями: в противоположных (а) и смежных (б, в) плечах
|
Аналогично получим схемы сравнения между собой реактивных сопротивлений, содержащих индуктивности (рис. 2.18, б) и емкости (рис. 2.18, в).
Правильный выбор регулируемых элементов моста и питание моста напряжением повышенной частоты (1000 Гц и выше) обеспечивает быстрое равновесие моста или его хорошую сходимость.
Сходимость мостов — это возможность достижения состояния равновесия определенным числом переходов от регулировки одного параметра к регулировке другого. Хорошая сходимость означает малое число операций и, следовательно, сокращение времени измерения.
Мосты переменного тока можно разделить на две группы:
1. Частотно-независимые, уравновешенные при одной частоте, сохраняющие равновесие при изменении частоты источника питания.
2. Частотно-зависимые, характеризующиеся тем, что в условии равновесия, помимо С, L, R, имеется частота, входящая в выражение реактивных составляющих сопротивления.
Погрешность мостов переменного тока складывается из следующих составляющих: погрешности выполнения отдельных элементов мостовой схемы, погрешности подгонки элементов, погрешности от неполного учета активной и реактивной составляющих сопротивлений плеч моста, погрешности отсчетного устройства. Чем выше частота питания схемы моста, тем в большей степени проявляются эти погрешности. Для их уменьшения мост переменного тока питают от сети переменного тока через разделительный трансформатор, заземляют для уменьшения влияния паразитных емкостей и токов утечек, уменьшают влияние сопротивления соединительных проводов.
Существуют четыре класса точности мостов переменного тока: 0,05; 0,02; 0,1; 0,2. Нулевым индикатором на низкой частоте в них служит вибрационный гальванометр. При частоте 1000 Гц и выше питание осуществляется от звуковых генераторов, в качестве индикатора равновесия используются электронные нулевые индикаторы.
Универсальные мосты обеспечивают измерение значений величин в широких пределах.
2.5. АНАЛОГОВЫЕ ЭЛЕКТРОННЫЕ ИЗМЕРИТЕЛЬНЫЕ
ПРИБОРЫ
Электронные приборы можно разделить на две большие группы: аналоговые электронные измерительные приборы со стрелочным отсчетом и приборы дискретного типа с цифровым отсчетом.
В зависимости от характера измерений и вида измеряемых величин, их также подразделяют на группы:
Дата добавления: 2015-04-11; просмотров: 328; Мы поможем в написании вашей работы!; Нарушение авторских прав |