КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ИЗМЕРЕНИЕ НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН
6.1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Внедрение механизации и комплексной автоматизации в производство требует быстрого и точного контроля технологических процессов, что связано с измерением и контролем разнообразных параметров физических величин. Особенно большое число неэлектрических величин требуется измерять и контролировать в металлургической, химической и текстильной отраслях промышленности. Развитие измерительной техники показало, что среди многочисленных методов измерения неэлектрических величин наибольшими преимуществами обладают электрические методы, которые обеспечивают:
• возможность измерения сигналов очень малой величины — применение электронных усилителей дает возможность измерять такие сигналы, которые не могут быть измерены никакими другими способами;
• возможность передачи измеренной величины на расстояние, а следовательно, и возможность дистанционного управления различными процессами;
• высокую точность и скорость измерений;
• возможность комплектования измерительных и управляемых ими автоматических установок унифицированными электроизмерительными приборами.
Для измерения любой неэлектрической величины X (температуры, давления, расхода жидкости, скорости, перемещения, ускорения, деформации, вибрации и т.д.) ее преобразовывают с помощью первичного измерительного преобразователя или датчика в выходную электрическую величину Y. Далее сигнал Y преобразуется цепью измерительных преобразователей прибора, где он претерпевает ряд изменений по уровню и спектру и преобразуется из одного вида энергии в другой. Таким образом, прибор для измерения неэлектрических величин в общем можно представить в виде цепи измерительных преобразователей, последовательно преобразующих измеряемую величину X в ряд других величин и в конечном итоге — в число (код), определяющее значение измеряемой величины в определенных единицах измерения.
Измерительный преобразователь — техническое средство с нор мативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или из мерительный сигнал, удобный для обработки, хранения, даль нейших преобразований, индикации или передачи. Учитывая, что объект измерения, как правило, сложный процесс, характеризующийся множеством различных параметров, то информативным параметром входного сигнала будем считать непосредственно измеряемую величину или величину, функционально связанную с измеряемой величиной. Неинформативный параметр не связан функционально с измеряемой величиной, но влияет на метрологические характеристики преобразователя.
Параметры, характеризующие условия, в которых работает преобразователь, и влияющие на его функцию преобразования, называют влияющими величинами. Зависимость изменения метрологических характеристик преобразователя от изменения влияющей величины или неинформативного параметра входного сигнала в пределах рабочих условий эксплуатации называется функцией влияния. Функция влияния может быть нормирована в виде формулы, графика или таблицы.
Функция преобразования. Статическая характеристика (функция) преобразования — это связь, выражающая зависимость информативного параметра выходного сигнала от постоянного во времени информативного параметра входного сигнала. Ее можно описать аналитическим выражением или графиком. В аналитическом виде характеристика преобразования представляется зависимостью Y=f(X), которая может быть линейной (рис. 6.1, а) или нелинейной (рис. 6.1, б, в). Различают номинальную функцию преобразования Уном = fHmt(X), приписываемую измерительному пре-
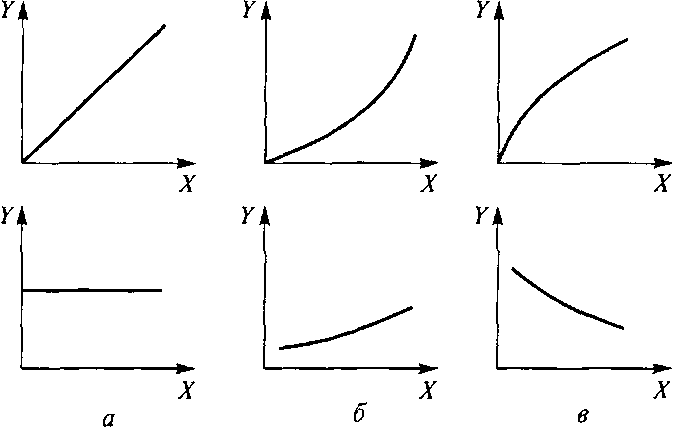 Рис. 6.1. Функции преобразования: а — линейная; 6, в — нелинейные
Рис. 6.1. Функции преобразования: а — линейная; 6, в — нелинейные
|
образователю согласно государственным стандартам, техническим условиям и другим нормативным документам, и реальную (рабочую) Yp = fp(X), которую он имеет в действительности.
Динамические характеристики преобразователей представляют собой зависимость информативного параметра выходного сигнала от меняющихся во времени параметров входного сигнала. К числу динамических относятся характеристики: импульсная g(t), являющаяся реакцией преобразователя на дельта-функцию 5(/); переходная h(t) — реакция на единичный ступенчатый сигнал; передаточная функция — отношение операторных изображений выходной величины к входной К(р) = Y(p)/X(p)\ амплитудно- и фазочастотная. Динамические (инерционные) свойства преобразователей характеризуют такими понятиями как скорость преобразования и время преобразования. Скорость преобразования (измерения) определяется числом преобразований (измерений) в единицу времени, выполняемых с нормированной погрешностью. Время преобразования (измерения) — время, прошедшее с начала преобразования (измерения) до получения результата с нормированной погрешностью.
Чувствительность. Чувствительностью преобразователя называют отношение изменения выходной величины (информативного параметра) к вызывающему его изменению входной величины (информативного параметра входного сигнала). Чувствительность равна производной от функции преобразования преобразователя S= dY/dX= АГ/АХи геометрически выражается тангенсом угла наклона касательной в любой точке кривой функции преобразования.
Для линейных преобразователей чувствительность постоянна и определяется по формуле
S= Y/X, (6.1)
а для нелинейных она всегда зависит от входного сигнала.
Погрешность. Абсолютные, относительные и приведенные погрешности преобразователя определяются по входу и выходу, так как входная и выходная величины могут иметь разную физическую природу, а также вследствие того, что часто отсутствует измерительный преобразователь, по которому можно было бы поверить рабочий преобразователь. Смысл определения погрешностей по входу и выходу поясняется на рис. 6.2, а. Абсолютная погрешность Fp преобразователя по выходу — это разность значений реальной Fp и номинальной FHOM функций преобразования при одном и том же значении входной величины X
Ау = Гр - Гном. (6.2)
Погрешность создается самим преобразователем, поэтому представляется целесообразным знать значение входного сигнала, со-
 Рис. 6.2. Графики погрешностей: а — по входу и выходу; 6 — аддитивная; в — мультипликативная
Рис. 6.2. Графики погрешностей: а — по входу и выходу; 6 — аддитивная; в — мультипликативная
|
ответствующего погрешности преобразователя. Абсолютная погрешность преобразователя по входу
АХ=Хном-Хл, (6.3)
где ХД— действительное значение входной величины; JHOM — значение входной величины, определяемое по номинальной функции преобразования = /ит,(Х) при значении выходной величины FH0M, соответствующей действительному значению Ха.
Относительные погрешности по выходу и входу определяются соответственно равенствами
Увых= Ьу/УР и увх = ЛХДд.
Приведенные погрешности по выходу и входу соответственно
Уприв.вых — ^max ~~ ^min) И Уприв.вх= ^X(Xmax —-^min)>
где Xmax, Ymax, Xmjn, — максимальные и минимальные значения входной и выходной величин преобразователя.
Погрешности преобразования зависят как от свойств самого преобразователя, так и от условий, в которых он работает (температуры и влажности окружающей среды, наличия внешних электрических и магнитных полей и т.д.). При нормировании точности измерительных преобразователей обычно указывают область допустимых значений погрешностей преобразования, реализуемого преобразователем при «нормальных условиях» (основная погрешность), и допустимые изменения функции преобразования при определенных изменениях влияющих величин.
На практике часто используются преобразователи с линейной функцией преобразования, не проходящей через начало координат (рис. 6.2, б),
YP=SX+Y0, (6.4)
где У0 — значение выходной величины при нулевом значении входной.
Отклонение такой реальной функции от номинальной вызвано отклонениями Y0 и чувствительности S. Погрешность, обусловленная неноминальным значением выходной величины при нулевом значении входной, называется аддитивной:
4щд = ДУО = Уо~ *0ном. (6-5)
где Jqhom — номинальное значение выходной величины при нулевом значении входной.
При изменении У0 график функции преобразования (см. рис. 6.2, б) перемещается параллельно самому себе, т.е. аддитивная погрешность не зависит от входной величины.
Погрешность, обусловленная неноминальным значением чувствительности S, называется мультипликативной. Погрешность чувствительности, представляющая собой мультипликативную составляющую основной погрешности, приводит к изменению угла наклона реальной характеристики преобразователя относительно номинальной (рис. 6.2, в). При этом абсолютная погрешность Дм = Y0 - Y„mt зависит от входной величины X. Например, при изменении температурных условий работы преобразователя его чувствительность изменилась на AS и стала равной S = SHOM + AS, где ^ном — номинальное значение чувствительности преобразователя. Абсолютная погрешность чувствительности преобразователя в этом случае будет
Au=[(SHmi+AS)X + Y0]-[SmMX + Y0] = ASX, (6.6)
т.е. абсолютная мультипликативная погрешность пропорциональна входной величине X.
6.2. СХЕМЫ ВКЛЮЧЕНИЯ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Схемы включения преобразователей для получения электрической величины во многом определяют метрологические свойства самих приборов для измерения неэлектрических величин. Эти приборы можно разделить на приборы прямого и компенсационного преобразований.
Метод прямого преобразования. В приборах, использующих метод прямого преобразования (рис. 6.3), результат измерения получается после ряда последовательных преобразований измеряемой величины в отклонение подвижной части измерителя. Эти приборы достаточно просты, надежны, но они имеют невысокие метрологические характеристики.
В измерительном преобразователе Пр происходит преобразование измеряемой неэлектрической величины Хв электрическую Э.
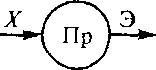 Э=/(х)
Э=/(х)
|
|
| Ус |
Э,
иц
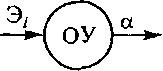
Э;=/(Э) а = дэ;-)
Рис. 6.3. Структурная схема прибора прямого преобразования
Эту величину в общем случае можно преобразовать в измери тельной цепи ИЦ еще несколько раз. Затем величина Э, = /(Э] усиливается при необходимости усилителем Ус и поступает h;i отсчетное устройство ОУ, регистрирующее значение входной ве личины X.
| Пр^ИЦ°Ус°ОУ> |
Функция преобразования измерительного прибора получается путем последовательной подстановки функций преобразования каждого из звеньев преобразования измеряемой неэлектрическон величины в выражение функции преобразования последнего звена а=/(Э-) и позволяет учесть влияние конструктивных парамет ров всех преобразователей на функцию преобразования прибора Чувствительность прибора, состоящего из ряда последовательно соединенных преобразователей, имеющих линейную функцию преобразования, определяется по формуле
^ Аа АЭ АЭ,- A3J Аа
пр ~ 1х ~ дУдэ" АЭ,- дэ;
т. е. она равна произведению чувствительности отдельных его преобразователей.
Следовательно, для увеличения чувствительности прибора в целом нужно стремиться к увеличению чувствительности отдельных звеньев схемы. Однако одновременно с этим увеличивается чувствительность прибора к внешним дополнительным факторам (колебанию питающего напряжения, частоты, изменению температуры внешней окружающей среды и т.д.), что приводит к появлению дополнительных погрешностей прибора. Эти погрешности будут тем больше, чем меньше различие чувствительности к дополнительным факторам и чувствительности к измеряемой величине. Чтобы чувствительность всего прибора была постоянной, т. е. функция его преобразования a=f(X) была строго линейной, функции преобразования измерительных преобразователей прибора должны быть линейными и постоянными, а линейность характеристик отдельных измерительных преобразователей, входящих в схему прибора, должна быть согласована по диапазону. При этом следует учитывать, что чувствительность каждого преобразователя постоянна только на определенном участке характеристики, которая ограничивается, с одной стороны, пределом преобразования, а другой — порогом чувствительности.
Предел преобразования преобразователя — это максимальное значение входной величины, которая еще может быть воспринята
преобразователем без искажения этой величины и без повреждений преобразователя.
Порог чувствительности преобразователя — это минимальное изменение значения входной величины, которое можно обнаружить с помощью данного преобразователя.
Абсолютная погрешность для прибора с последовательным соединением преобразователей равна алгебраической сумме пересчитанных к выходу погрешностей всех входящих в него преобразователей:
АУ = ^иц^Ус^оуА Э + SycS0yA3j + SoyA3■ + Да.
Приведенная погрешность для такого прибора будет равна сумме приведенных погрешностей составляющих:
Ynp - Ynp.np + Упр.иц + Упр.Ус + Ynp.oy> (6-7)
а приведенная среднеквадратичная погрешность при отсутствии корреляции между составляющими согласно (1.19) определяется по формуле
У Hp = Vy2 Кр.пр + Y2 Нр.иц + У2 Нр.Ус + У2 Ир.ОУ • (6-8)
Из сказанного ясно, что погрешность измерения неэлектрической величины А'зависит от погрешности всех последовательно включенных преобразователей.
Использование в приборах дифференциальной схемы включения преобразователей (рис. 6.4) позволяет существенно улучшить метрологические характеристики приборов. Основу таких схем составляет вычитающий преобразователь — это преобразователь с двумя входами, выходная величина которого представляет собой нечетную функцию разности двух входных одноименных сигналов Э = F(3X - Э2).
Здесь имеются два самостоятельных, как правило, одинаковых канала последовательно включенных преобразователей, находящихся в одинаковых рабочих условиях, в один из которых включен рабочий преобразователь Прь а во второй — нерабочий преобразователь Пр2. Неэлектрические величины Хх и Х2,
Пр3 Э3=/(Э) <х = /(Эз)
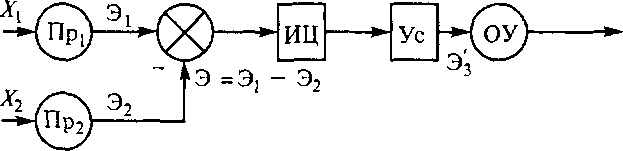 Рис. 6.4. Структурная схема прибора с дифференциальным преобразователем
Рис. 6.4. Структурная схема прибора с дифференциальным преобразователем
|
поступающие на вход преобразователей Пр, и Пр2, преобразуются в электрические сигналы Э, и Э2 и поступают на вычита ющий преобразователь Пр3. Сигнал Э = Э, - Э2 с выхода вы читающего преобразователя идет далее уже по цепи прямого преобразования.
Рассмотрим в общем виде свойства дифференциальной схемы, считая для простоты, что преобразователи Пр, и Пр2 имеют линейную функцию преобразования вида (6.4)
Г, + Y2=SX2+Y0. (6.9)
Тогда функция преобразования дифференциального преобразователя запишется в виде
Y = Yl-Y2=S(Xl-X2). (6.10)
Рассмотрим работу дифференциальной схемы включения преобразователей в двух режимах.
1. Пусть Хх = X, а Х2 — одноименная ей физическая величина, имеющая постоянное значение. Тогда функцией преобразования дифференциального преобразователя является зависимость Y = SX, а его чувствительность равна чувствительности одного канала Sa = dY/dX= S. Второй канал в этом случае используется для компенсации погрешностей, связанных с возможными изменениями условий эксплуатации прибора.
2. Пусть предварительно преобразованная измеряемая величина Xвоздействует на оба канала одновременно, но в противофазе при Х0 = const
Х\ ~ Х0 + Х\ Х2 -- Xq — X.
В этом случае функция преобразования дифференциального преобразователя имеет вид
Y=2SX, (6.11)
а его чувствительность SR в два раза больше чувствительности одного канала:
Sa=2S, (6.12)
и эти соотношения выполняются тем лучше, чем меньше измеряемая величина X.
Рассмотрим погрешность дифференциального преобразователя. Пусть преобразователи Пр! и Пр2 имеют аддитивные погрешности. В этом случае можно записать
У, = SX, + А К; У2 = SX2 + АХ
Погрешности А К обоих каналов можно считать равными, так как каналы одинаковые и находятся в одних и тех же условиях. Из выражения (6.10) для функции преобразования дифференциального преобразователя видно, что аддитивные погрешности обоих каналов взаимно компенсируются.
Мультипликативная погрешность, зависящая от уровня входного сигнала Хтем меньше, чем меньше измеряемая величина и чем выше и стабильнее линейность функции преобразования.
Линейность функции преобразования дифференциальной схемы во втором режиме работы достаточно высокая и при малых X лучше, чем линейность функции преобразования преобразователей Пр[ и Пр2.
Метод компенсационного преобразования. В приборах, использующих метод компенсационного преобразования (с применением отрицательной обратной связи), удается значительно уменьшить как аддитивную, так и мультипликативную погрешности. Применение обратной связи позволяет создать приборы, обладающие малой статической и динамической погрешностями, имеющие большую выходную мощность.
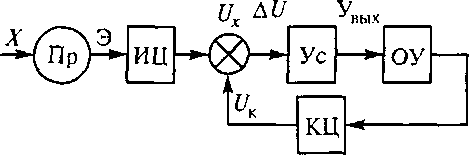
Структурная схема такого прибора с компенсацией измеряемой электрической величины на выходе преобразователя приведена на рис. 6.5. Входная неэлектрическая величина X после ее преобразования поступает в виде электрического сигнала Ux на один из входов вычитающего преобразователя, на другой вход которого подается напряжение UK, получаемое на выходе от компенсационной цепи КЦ.
Компенсационная цепь приводится в действие выходным напряжением усилителя Ус с таким расчетом, чтобы разность AU была достаточно мала. Мерой измеряемой неэлектрической величины является величина Увых, воздействующая на компенсационную цепь КЦ. Измеритель ОУ в данном случае является механическим устройством, например реохордом, включенным в цепь моста или компенсатора. Общая погрешность измерения складывается только из погрешностей измерительного преобразователя Пр, измерительной и компенсационной цепей. Исключение погрешностей этих узлов может быть достигнуто в компенсационных приборах с компенсацией измеряемой неэлектрической величины (рис. 6.6).
 Р
Рис. 6.5. Структурная схема прибора с компенсационным преобразователем
Р
Рис. 6.5. Структурная схема прибора с компенсационным преобразователем
|
| Ус |
| ип |
| РУ |
Иц
|
| X |
| АХ |
| Пр |
| хг |
Рис. 6.6. Структурная схема прибора с частичной компенсацией погрешностей
Здесь обратный преобразователь ОП преобразует выходную электрическую величину У в неэлектрическую Хк однородную с измеряемой величиной X. Разность между Хи Хк (АХ), преобразованная в электрическую величину Э и усиленная усилителем Ус, воздействует на регулирующее устройство РУ, которое связано с источником питания ИП. В результате этого на измеритель ОУ и обратный преобразователь подается такая электрическая величина У, которая, будучи преобразована в неэлектрическую величину Хк, компенсирует измеряемую величину X. Таким образом, вся цепь прямого преобразования оказывается охваченной обратным преобразованием и при АХ« X погрешность всех преобразующих звеньев практически исключается. Общая погрешность измерения складывается только из погрешностей измерителя ОУ и обратного преобразователя. Следовательно, по сравнению с предыдущим случаем, здесь вместо погрешности прямого преобразователя появляется погрешность обратного преобразователя. Реальный выигрыш при переходе от схемы на рис. 6.5 к схеме на рис. 6.6 может быть получен лишь в том случае, когда погрешность обратного преобразователя будет меньше погрешности прямого преобразователя. В приборах с обратной связью роль преобразователя обратной связи выполняют простые устройства, обладающие высокой точностью. При этом высокую точность имеет и прибор в целом.
Большинство современных измерений неэлектрических величин электрическими методами не требует допустимой погрешности, меньшей 0,5... 1,0 %, так как часто погрешности самих преобразователей довольно велики. Но зато требуются более простые устройства с достаточно быстрым отсчетом измеряемой величины непосредственно по шкале измерительного устройства. В практике измерения неэлектрических величин часто применяют мостовые и компенсационные схемы.
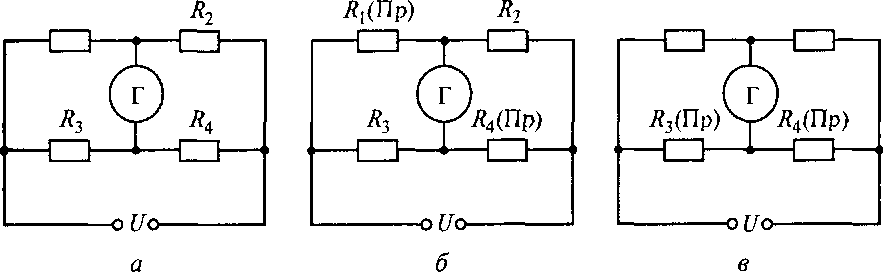
Включение преобразователей в мостовые схемы. В зависимости от требований к чувствительности мостовой схемы и к линейности функции преобразования можно различить три способа включения преобразователей в мостовую схему (рис. 6.7).
Мост с преобразователем, включенным в одно плечо моста (Лпр = Rx) (см. рис. 6.7, а). В этом случае при симметрии Rx = R2, R3 = R4 и выполнении условий оптимального режима работы моста ток в гальванометре
|
| л,(Пр) |
| Д,(Пр) |
| Рис. 6.7. Способы включения преобразователей в мостовую схему: а — в одно плечо моста; б — в противоположные плечи; в — в два соседних плеча |
1+ е J_
| (6.13) |
| /г =U- 4 R |
2 + е + 2
Это уравнение показывает, что при таком включении преобразователя имеет место большая степень нелинейности функции преобразования (е = ARi/ R\ входит в числитель и знаменатель), достигающая 2...3 %.
Мост с двумя рабочими преобразователями, включенными в противоположные плечи (Rnp = Rx = = R4) (см. рис. 6.7, б). Данное включение применяют, если хотят увеличить чувствительность схемы. Действительно, как известно, отклонение стрелки гальванометра пропорционально разности R{ R4~ - R2R3. Если сопротивления Л, и it, увеличатся (или уменьшатся) на одну и ту же величину, то чувствительность схемы возрастет вдвое по сравнению со схемой с одним рабочим преобразователем. При таком включении преобразователей для компенсации температурной погрешности требуется включение в остальные два плеча нерабочих преобразователей, аналогичных Л, и R4.
| (6.14) |
| 4 R |
Недостатком включения рабочих преобразователей является большая нелинейность функции преобразования. Действительно, при R^Rt = R2R3, Ri = R2 = R3 = R4 = R м ARx = AR^ сила тока в гальванометре определяется по формуле
/г = U-
1+-Е
Из этого уравнения видно, что в данном случае нелинейность шкалы будет гораздо больше, чем в предыдущем случае (7 ... 10 %).
Мост с двумя рабочими преобразователями, включенными в два соседних плеча моста (Лпр = = Rx = R3) (см. рис. 6.7, в). Это преобразователи дифференциально
го типа. Два сопротивления (активных, реактивных или полныу) под действием неэлектрической величины изменяются с проти воположными знаками. Тогда ток в гальванометре будет пропор ционален разности:
/г =с[(Я, + AR2)Ra-(R2-AR2)R3],
где с — коэффициент пропорциональности.
При этом чувствительность схемы по сравнению со случаем включения преобразователя в одно плечо увеличится в два разп Одновременно достигается и температурная компенсация.
При выполнении оптимальных условий (при симметрии /?, = R, и R3 = &,) получим
откуда видно, что шкала прибора с дифференциальным преобразователем имеет наибольшую линейность по сравнению с двумя предыдущими схемами (изменение сопротивления е входит в знаменатель в квадрате и при достаточно малом AR является бесконечно малой величиной). Максимальная степень нелинейности может быть около 0,5 %.
Таким образом, для достижения наибольшей чувствительности мостовой схемы в сочетании с наименьшей нелинейностью функции преобразования нужно пользоваться схемой с дифференциальным преобразователем.
Все случаи, рассмотренные выше, могут быть отнесены к мостам как постоянного, так и переменного тока, с той лишь разницей, что в мостах переменного тока вместо активного сопротивления R вводится комплексное сопротивление Z, а при балансировке моста необходимо компенсировать еще и фазовые сдвиги между током и напряжением в плечах моста.
Выбор оптимальных параметров мостовых схем. Известно, что если мостовая цепь работает на указатель конечного сопротивления, то для получения наибольшей чувствительности необходимо согласовывать сопротивление указателя с выходным сопротивлением моста.
Симметричные мостовые схемы. В практике измерения неэлектрических величин часто применяют симметричные мостовые схемы (см. рис. 6.7, а). Имеются два вида симметрии мостовых схем:
1) Rl=R2, R3= Л4;
2) Я, = R3, R2 = R,.
Первый вид симметрии получается, если активными элементами моста считать плечи и R2, тогда максимальная сила тока в указателе будет при /?3 = R4 —> 0. Второй вид симметрии получается, если активными элементами моста считать = R3: тогда максимальный прирост напряжения на указателе будет при R2 = R4 —> <».
Оптимальные соотношения между сопротивлениями мостовой цепи различны для каждого вида симметрии.
При симметрии Rx = R2 и R3 = Л, получим выражение для мощности, получаемой указателем:
F2
р =и 2______ Ё____
^ 32(/?г +/?3)'
где е — чувствительность моста.
Максимум этого выражения будет при /?, = R4—>0, а условие согласования сопротивления измерителя и выходного сопротивления моста, имеющего общий вид
_ R\R2 R3R4
Rv-R^R^R^R,' (616)
окажется следующим: Rr = Rx / 2. Однако при выполнении этого условия источник тока, питающий мост, должен обладать бесконечной мощностью. Если же мощность источника ограничена, то с точки зрения наилучшего использования источника тока (т.е. получение максимального КПД) наиболее выгоден равноплечий мост:
R\ = R2 = Rt, = Л4 =
На практике большой интерес представляет соотношение мощности, получаемой указателем, к мощности преобразователя Рпр:
РуК /Рпр-
При R, = R2 и R3 = R4 О мощность, получаемая указателем, оказывается равна Рук = Рпре2/8. Тогда, как в случае равноплечего моста, Рук = Рпре2/16. Таким образом, при симметрии Rt = R2, R3 = R4 целесообразно уменьшать величины сопротивлений /?3 и R4 до значений, ограниченных мощностью источника тока.
Для симметрии Rx = R3; R2= R\ максимум Рук достигается при R4 = = RJ2 и, соответственно, RyK = (2/3)/?,. При этом RyK max = Rnpe2/24, т. е. меньше, чем при симметрии первого вида, и если мощность источника не ограничена, то целесообразна следующая симметрия /?, = R2, R3 = R^.
Применение симметричных схем дает возможность избавиться от температурной погрешности преобразователя, так как соседнее с преобразователем плечо (R2 или /?3) выполняется идентично. Действительно, уравнение равновесия моста выражается в виде R1R4 = R2Ry
Если, например, в случае первой симметрии, равные сопротивления R\ и R2 одновременно изменят свои величины на ДR, то, очевидно, равновесие моста не нарушится. Это свойство, пран да, не относится к преобразователям, удаленным от измеритель ной схемы, и к термометрам сопротивлений.
Компенсационные схемы постоянного и пере менного токов. Для измерения неэлектрических величин кроме мостовых схем большое распространение получили компенсаци онные схемы постоянного и переменного токов. Компенсационные схемы, не имеющие потребления и обладающие высокой чувстви тельностью, применяются для измерения малых ЭДС, развиваемы\ преобразователями, например термопарами. Используемые на прак тике самоуравновешивающиеся компенсаторы отличаются от ком пенсаторов с ручным управлением только тем, что часть рабочей цепи выполнена в виде реохорда, по которому скользит движок, управляемый реверсивным электродвигателем, который начинаем вращаться при разбалансировке компенсационной схемы.
Индикаторы приборов для измерения неэлектрических величин могут быть разделены на две группы: указатели нуля и указатели текущего значения. Для равновесных мостов и компенсаторов посто янного тока в качестве индикаторов применяют магнитоэлектричес кие гальванометры. Эти гальванометры выбирают по величине со противления гальванометра для согласования с выходным сопротивлением схемы и по внешнему критическому сопротивлению гальванометра с тем, чтобы не создать «переуспокоенный» или «недоус- покоенный» режим движения подвижной части гальванометра.
В качестве индикаторов для равновесных мостов переменного тока служат вибрационные гальванометры, электронные приборы, телефоны, различные устройства с выпрямителями.
При выборе индикатора для неравновесных мостов руководствуются теми же требованиями, что и для равновесных. Кроме того, необходимо учитывать точность указателя, так как его погрешность в неравновесных мостах целиком входит в погрешность измерения. Для неравновесных мостов постоянного и переменного токов могут служить показывающие приборы соответственно постоянного и переменного токов всех систем.
При регистрации особо быстрых процессов (ударов, взрывов и т.п.) в качестве указателей используют электронные осциллографы и результаты измерений фотографируют с экрана электронно-лучевой трубки. Такие приборы регистрируют процессы с частотами до 100 кГц и выше.
6.3. ДИНАМИЧЕСКИЕ СВОЙСТВА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
При выборе преобразователей для измерения переменных во времени величин (давления, ускорения и т.п.) нужно помнить о
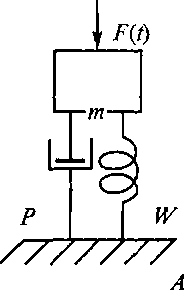
Рис. 6.8. Физическая модель измерительного преобразователя:
F{t) — внешняя переменная сила; Р — демпфер (успокоитель)
погрешностях, связанных с динамическим режимом работы преобразователей и обусловленных их инерционными свойствами. Общий вид модели измерительного преобразователя представлен на рис. 6.8. Внешняя переменная сила F(t) действует на массу т, связанную с неподвижным телом А упругим элементом (например пружиной JV). В преобразователях такого вида могут быть погрешности двух типов: амплитудная и фазовая.
Амплитудная погрешность. Если к массе т приложена переменная сила F(t), то при ее воздействии амплитуда колебаний массы т оказывается больше по сравнению с амплитудой перемещения ее при единичном воздействии силы. Исследования уравнения движения подвижной части преобразователей в динамическом режиме, при синусоидальном законе изменения силы F(t), дали кривые зависимости A=f(X) (рис. 6.9).
Амплитудная погрешность вынужденных колебаний — отклонение наибольшей амплитуды колебаний в динамическом режиме (вынужденные колебания) к амплитуде перемещения подвижной части при единичном воздействии силы:
^ " -^тах д/-^тах ед'
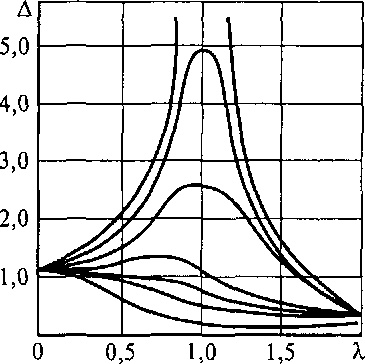 Рис. 6.9. Амплитудная погрешность преобразователей
Рис. 6.9. Амплитудная погрешность преобразователей
|
При синусоидальном колебании подвижной части амплитудная погрешность
X2
А =
^(л2 - I)2 +4р2Л2
где к = со/со0 — отношение угловой частоты вынужденных колебаний к частоте со0 собственных колебаний подвижной части; (3 = Р/Ркр — степень успокоения подвижной части; РКТ> — коэффициент успокоения при критическом режиме движения массы, т. е. при наименьшем времени успокоения.
|
Из кривых на рис. 6.9 видно, что при малых значениях (3 максималь
ная амплитудная погрешность имеет место при Х= 1, т.е. при резонансе (со = со0). Поэтому преобразователи перемещений и сил, работающие в динамическом режиме, должны иметь Я = со/со0 многс меньше единицы, т.е. должны иметь собственную частоту со0 боль ше частоты измеряемого процесса о).
Если собственная частота преобразователя со0 будет меньше частоты измеряемого процесса со, деталь (масса т) может выхо дить из соприкосновения с силой F и измерения будут неверные Из кривых на рис. 6.9 видно, что амплитудная погрешность А за висит также от степени успокоения подвижной части преобразо вателя и имеет наименьшее значение при (3 = 0,6...0,7.
Фазовая погрешность. Фазовая погрешность преобразователе i i выражается в запаздывании вынужденных колебаний подвижном части от колебаний измеряемой величины (рис. 6.10). Из рисунка видно, что при (3= 0,7 изменение фазовой погрешности имее! почти линейную зависимость от А, а У меньше при малом X. Фазо вую погрешность можно вычислить по формуле
У = arctg—г-—.
БХ2 -1
Таким образом, при измерении переменных во времени меха нических величин во избежание больших амплитудных и фазовых погрешностей важно так подобрать параметры преобразователя, чтобы обеспечить соответствующее соотношение частоты собственных колебаний преобразователя и частоты измеряемого процесса (вынужденных колебаний), а также степень успокоения подвижной части преобразователя [3= 0,6...0,7.
Погрешности системы преобразования. Основная погрешность прибора, состоящего из цепи измерительных преобразователей, складывается главным образом из двух составляющих:
• инструментальной погрешности, обусловленной погрешностями элементов, входящих в каждое звено (например, погрешность подгонки сопротивлений, трение в подвижных частях механизма, недостаточная тщательность исполнения деталей звена);
• погрешности из-за недостаточной чувствительности усилителя и индикаторов.
 Рис. 6.10. Фазовая погрешность преобразователей
Рис. 6.10. Фазовая погрешность преобразователей
|
Каждое из звеньев цепи вносит свою долю в результирующую основную погрешность прибора, причем при прямом преобразовании все звенья равноценны по степени влияния на общую погрешность. Поэтому стремятся всегда уменьшить число звеньев цепи преобразования.
Точность измерения неэлектрической величины зависит также и от ряда дополнительных факторов, которые также необходимо учитывать. К ним относятся изменения напряжения, частоты и формы кривой напряжения питания, а также окружающей температуры, влажности и вибрации.
Влияние дополнительных факторов можно оценить чувствительностью каждого звена к тому или иному фактору, т.е. отношением изменения выходной величины преобразователя данного звена к изменению дополнительного фактора (относительно его значения при градуировке).
Дополнительные факторы вызывают дополнительную составляющую погрешности нуля и чувствительности прибора. Действительно во всех мостовых цепях (кроме равновесных мостов) при изменении питающего напряжения появляется погрешность чувствительности; в усилителях изменяется чувствительность. При изменении температуры изменяются жесткость упругих элементов, индукция постоянных магнитов, магнитные свойства ферромагнитных материалов. Кроме того, погрешности нуля и чувствительности прибора могут быть вызваны изменением во времени параметров отдельных элементов схемы, шумами в элементах схемы, наводками промышленной частоты и т.д.
Для уменьшения дополнительных погрешностей прибегают к стабилизации напряжения и частоты источников питания, к различным приемам коррекции этих погрешностей и особенно заботятся о стабильности во времени физических свойств и параметров элементов прибора.
Кроме того, при анализе погрешностей сложных измерительных устройств, состоящих из целого ряда самостоятельных звеньев, не всегда можно строго разграничить погрешности на систематические и случайные.
Например, погрешность измерения от колебаний напряжения питающей сети с первого взгляда представляется систематической, так как на каждые ± 10 % питающего напряжения прибор может иметь ± 1 % изменения чувствительности. Однако мгновенные изменения питающего напряжения сети происходят хаотически и погрешность измерения, возникающая из-за этого, хотя и является однозначной функцией этого напряжения, но будучи функцией случайной величины, представляет собой также случайную Величину. Это сильно затрудняет суммирование погрешностей измерительных устройств. Поэтому при анализе и выборе метода и суммирования погрешностей сложных измерительных устройств следует делить погрешности не на систематические и случайные, а по признаку их сильной или слабой взаимной корреляционной связи. Если ряд погрешностей одного или нескольких преобразователей вызывается одной общей причиной, в результате чего они оказываются сильно связаны между собой, то эти погрешности будут распределены по одному и тому же закону, а форма результирую щего закона распределения будет также соответствовать этому за кону. Поэтому внутри каждой из этих групп погрешности должны складываться алгебраически с учетом их знака.
Результирующие погрешности, полученные после суммирова ния в каждой из групп, уже не имеют между собой сильных кор реляционных связей и должны рассматриваться как независимые и, следовательно, должны складываться геометрически.
6.4. КЛАССИФИКАЦИЯ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Преобразователи обычно классифицируются по принципу их работы или практическому применению.
По назначению измерительные преобразователи делят на первичные преобразователи (датчики), унифицированные и промежуточные.
Первичный преобразователь является первым в измерительной цепи и включает в себя чувствительный элемент (зонд, мембрану) и другие необходимые элементы для преобразования входном неэлектрической величины в выходную электрическую величину. Датчик может состоять из одного или нескольких измерительных преобразователей, объединенных в единую конструкцию. На датчик непосредственно воздействует измеряемая неэлектрическая величина (сила, давление, уровень, температура и т.д.).
Унифицированный преобразователь состоит из датчика и схемы согласования, измеряемая физическая величина преобразуется с использованием источника энергии в нормированную выходную величину. Нормированные сигналы постоянного тока находятся в диапазоне 0...± 5 мА или 0...± 20 мА. Для устройств со смещенным нулем диапазон тока сужен: +1...± 5 мА или ±4...± 20 мА.
При необходимости регулирования границы диапазона токовых сигналов лежат в пределах: нижняя 0...5 мА, верхняя 12... 25 мА. В устройствах с нормированными токовыми сигналами допускается применение различных измерительных приборов с внутренним сопротивлением не более 1 кОм. Нормированные значения диапазонов сигналов напряжения составляют 0...±1 В и 0...±10 В, причем внутреннее сопротивление измерительных приборов не должно быть менее 1 кОм. При использовании в качестве выходной величины частоты рекомендуемый диапазон ее изменения составляет 5... 25 Гц. В пневматических системах нормировано давление газа. Оно должно находиться в диапазоне 0,02...0,1 МПа.
Промежуточный преобразователь получает сигнал измерительной Информации от предшествующего преобразователя и передает после преобразования этот сигнал последующему преобразователю.
По характеру преобразования входной величины измерительные преобразователи делят на линейные и нелинейные. У линейных преобразователей функциональная зависимость между входной и выходной величинами линейная; у нелинейных преобразователей — нелинейная.
По принципу действия датчики делятся на генераторные и параметрические. Выходным сигналом генераторных датчиков являются ЭДС, напряжение, ток или электрический заряд, функционально связанные с измеряемой величиной, например ЭДС термопары. В параметрических датчиках измеряемая величина вызывает пропорциональное ей изменение параметра электрической цепи (Я, L, С), например сопротивления реостатного датчика. К генераторным относятся: индукционные, пьезоэлектрические, Термоэлектрические и некоторые разновидности электрохимических датчиков. Остальные датчики являются параметрическими. По принципу действия их также подразделяют на типы: резистивные, в которых измеряемая величина преобразуется в изменение его сопротивления;
электромагнитные, в которых измеряемая величина преобразуется в изменение индуктивности или взаимоиндуктивности;
емкостные, в которых измеряемая величина преобразуется в изменение емкости;
пьезоэлектрические, в которых динамическое усилие преобразуется в электрический заряд;
гальваномагнитные, основанные на эффекте Холла и преобразующие действующее магнитное поле в ЭДС;
тепловые, в которых измеряемая температура преобразуется в ЭДС или в величину термосопротивления;
оптоэлектронные, в которых оптические сигналы преобразуются в электрические.
Для датчиков основными характеристиками являются: тип, диапазон измеряемой величины, диапазон рабочих температур и погрешность в этом диапазоне, обобщенное входное и выходное сопротивления, частотная характеристика.
Области применения датчиков чрезвычайно разнообразны. Благодаря внедрению новых технологий изготовления (высоковакуумное напыление, распыление, химическое осаждение из газовой фазы, фотолитография и т.д.) и новых материалов непрерывно расширяются сферы их применения. Рассмотрим лишь некоторые из них.
В промышленной технике стандартные датчики используют для измерения: расхода, объема; давления; температуры; уровня; химического состава.
Таблица
|
| * Автогенерирующие, или активные, приборы. 128 |
Из стандартных датчиков все большим спросом пользуются датчики новых типов, например:
• датчики положения, перемещения и изображения;
• оптические и волоконно-оптические датчики;
• биодатчики (биотехнология);
• многокоординатные датчики (распознавание образов).
Для современных производств характерна тенденция применения датчиков в интерактивном режиме, т. е. когда результаты измерений сразу же используются для регулирования процесса. Благодаря этому в любой момент обеспечивается корректировка технологического процесса, что естественно ведет к более рациональному производству. При промышленном применении определяющим фактором является погрешность, которая при регулировании процессов должна быть не более 1 ... 2 %, а для задач контроля — 2 ... 3 %.
В робототехнике, которая в принципе представляет собою сложную информационную систему, робот обеспечивает получение, обработку и преобразование информации. При получении информации через датчики роботу требуется прежде всего способность «видеть» и «ощупывать», т.е. использование оптических и многокоординатных датчиков.
При изготовлении датчиков для автомобильной электроники все в большей мере применяют современные технологии, обеспечивающие экономичное изготовление датчиков минимальных размеров для отдельных систем автомобиля (рулевое управление, двигатель, тормоза, электроника кузова), для обеспечения безопасности и надежности (система блокировки и противоугонная система), информационная система (расход топлива, температура, маршрут движения и т.д.). С помощью этих датчиков измеряются различные физические параметры — температура, давление, скорость вращения, ускорение, влажность, перемещение или угол, расход и т.д. Требования к этим датчикам в отношении воздействия окружающей среды достаточно высокие. В табл. 6.1 приведены области применения некоторых типов датчиков.
Контрольные вопросы
1. Перечислите достоинства электрических методов измерения неэлек- гр ических величин.
2. Изобразите графически структурную схему:
а) прибора прямого преобразования;
б) прибора уравновешивающего преобразования;
в) прибора с отрицательной обратной связью.
3. Запишите аналитическое выражение:
а) для определения чувствительности прибора;
б) для определения эффективности преобразования прибора.
5 Ранне!»
4. Изобразите графически эквивалентную схему измерительной цепи прибора.
5. Дайте определение эффективности преобразования, характеристического сопротивления, обобщенного входного и выходного сопротивлений преобразователя.
6. Сформулируйте преимущества равновесных мостовых схем.
7. Сформулируйте основное отличие равновесных мостовых схем от неравновесных.
8. Приведите способы включения преобразователей в мостовые схемы.
9. Перечислите основные виды симметрии мостовых схем и условия оптимального выбора параметров.
10. Как осуществляется выбор индикаторов к мостовым и компенсационным схемам?
11. Приведите классификацию первичных преобразователей.
12. Какие преобразователи относятся к генераторным?
13. Какие преобразователи относятся к параметрическим?
14. Перечислите погрешности преобразователей в динамическом режиме их работы.
15. Приведите физическую модель измерительного преобразователя
16. Опишите основные источники погрешности приборов для измс рения неэлектрических величин.
17. Как находится общая погрешность системы преобразования?
18. Приведите примеры использования датчиков для различных облп стей применения.
Дата добавления: 2015-04-11; просмотров: 1696; Мы поможем в написании вашей работы!; Нарушение авторских прав |