КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Типовые схемы обработки поверхностей
Задача назначения рабочих планов заключается в определении этапов и переходов, необходимых для обработки поверхностей заготовки. Введем ряд понятий.
Состояние поверхности - это модель поверхности, содержащая множество параметров (шероховатость и твердость поверхности, точность ее размеров и т. д.) для поверхности исходной заготовки или поверхности, полученной после выполнения перехода. Исходное состояние поверхности - состояние поверхности исходной заготовки. Конечное состояние поверхности - такое состояние поверхности заготовки, при котором параметры поверхности заготовки совпадают с параметрами поверхности детали. Типовой план обработки поверхности (ТПОП) - это направленный граф, у которого вершины pzj отображают состояния поверхностей, а дуги pi отображают переходы, необходимые для того, чтобы поверхность перешла из состояния pzj в состояние pzj+1. Рабочий план обработки поверхности(РПОП) - это типовой план обработки, доработанный применительно к конкретной поверхности детали таким образом, что представляет собой линейный граф, у которого последняя вершина отображает конечное состояние поверхности заготовки.
Исходя из указанных определений, граф типового плана обработки выглядит следующим образом:

В этом графе pz0 - исходное состояние поверхности. Решение задачи получения рабочего плана обработки поверхности заключается в последовательном сравнении модели поверхности детали с моделями состояний, начиная с состояния pz0. Как только модель поверхности совпадает с моделью состояния, то сравнение прекращают. Пройденный путь образует линейный граф рабочего плана обработки поверхности, причем последняя вершина представляет собой конечное состояние поверхности заготовки.
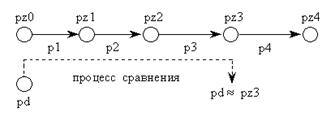
Предположим, для какой-то поверхности имеется следующий граф ТПОП:

Модель поверхности детали pd сначала сравнивается с pz0. Если совпадения моделей нет, то это означает, что для поверхности исходной заготовки с характеристиками pz0 необходимо применить переход p1 для получения поверхности с характеристиками pz1. В данном случае прохождение по этому графу закончилось на состоянии pz3, так как совпали модели pd и pz3 (Обозначение совпадения моделей: pd ~ pz3). Таким образом, получен рабочий план обработки поверхности:
Таким образом, в РПОП фиксируются какие переходы и в какой последовательности их необходимо применить к поверхности исходной заготовки для получения заданной поверхности детали. К сожалению не всегда структура типового плана имеет линейный вид. Так как типовые планы обработки могут иметь несколько начальных вершин. Например, граф типового плана обработки отверстия имеет вид.
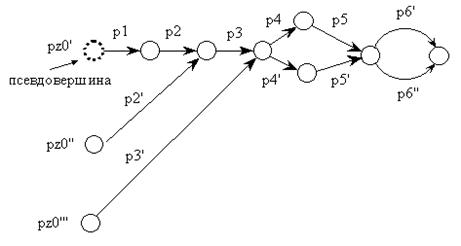
Где pz0' - исходное состояние поверхности прутка; pz'' - исходное состояние поверхности трубы; pz''' - исходное состояние поверхности отливки.
Наличие нескольких начальных вершин свидетельствует о возможности использования различных исходных заготовок: прутка, трубы, отливки. Вершина pz0' является псевдовершиной, т. е. вершиной, отображающей отсутствующее исходное состояние, так как поверхность отверстия образуется лишь после сверления отверстия в прутке (переход p1).
Две вершины могут быть связаны не одной дугой, а несколькими, т. е. переход в новое состояние может осуществляться с помощью различных переходов. Таким образом, ТПОП может представлять собой мультиграф. Например, чистовая обработка отверстия может быть выполнена как развертыванием, так и шлифованием (переходы p6' и p6''). В некоторых случаях ТПОП может представлять собой и граф типа "сеть без циклов". В этом случае достижение одного и того же состояния достигается с помощью некоторой последовательности переходов. Например, переходы р4 (предварительная расточка) и р5 (окончательная расточка) дают возможность получить такое же состояние, что и переходы р4' (предварительное зенкерование) и р5' (окончательное зенкерование).
После получения рабочего плана обработки его необходимо запомнить. Хранение рабочего плана обработки поверхности обеспечивается с помощью трех составляющих: Структура графа РПОП. Множество переходов необходимых для обработки заданной поверхности. Множество моделей состояний, получаемых при выполнении переходов РПОП.
Способы описания и хранения планов обработки поверхностей
Формирование рабочего плана обработки выполняется для всех обрабатываемых поверхностей детали. Для получения принципиальной схемы в переходах ТПОП зафиксированы номера этапов, на которых эти переходы выполняются. Поэтому для каждой i - ой поверхности детали выполняется анализ переходов, попавших в РПОП этой поверхности. На основании анализа формируется множество МЭi этапов, необходимых для обработки i - ой поверхности. Пересечение этих множеств дает множество МЭ=З МЭi этапов необходимых для обработки всей детали. Упорядочение этапов по их номерам позволяет получить принципиальную схему обработки детали. Например, для МЭ={Э12, Э2, Э3} после упорядочения получаем Сх=< Э2, Э3, Э12>. Общий результат проектирования рабочих планов обработки детали: Принципиальная схема обработки детали; Рабочие планы обработки для всех обрабатываемых поверхностей детали.
Дата добавления: 2015-04-15; просмотров: 646; Мы поможем в написании вашей работы!; Нарушение авторских прав |