КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Работа системы НАВСТАР.
В упрощенном виде работу системы GPS можно пояснить следующим образом. Спутники GPS вращаются вокруг Земли по круговым орбитам с частотой 2 оборота в сутки, передавая навигационные радиосигналы. GPS-приемники принимают эти сигналы и вычисляют местоположение методом триангуляции. Приемник сравнивает время излучения сигнала с временем приёма этого сигнала. Разность между этими величинами позволяет вычислить расстояние до спутника. Зная расстояние до нескольких спутников, GPS-приемник может определить свое местоположение и отобразить его на электронной карте (рис.25.17).
|
 Принимая информацию по крайней мере от трех спутников, GPS-приемник может определить двухмерные координаты пользо-вателя (широту и долготу). «Захватив» четыре и более спут-ников, ПИ определяет трёхмер-ные координаты (широту, долготу и высоту). Определив местополо-жение пользователя, приёмник вычисляет такие величины как
Принимая информацию по крайней мере от трех спутников, GPS-приемник может определить двухмерные координаты пользо-вателя (широту и долготу). «Захватив» четыре и более спут-ников, ПИ определяет трёхмер-ные координаты (широту, долготу и высоту). Определив местополо-жение пользователя, приёмник вычисляет такие величины как
скорость, путевой угол, траекторию, пройденное расстояние, расстояние до конечного пункта, время восхода и захода солнца и др.
|
 В СНС НАВСТАР используется псевдо-дальномерный способ относительной привязки, а так же доплеровские методы определения скорости объекта. Дальность до спутников-ориентиров определяется с помощью псевдо-случайного кода. Для этого приемник генерирует свой внутренний код в то же самое время, чтобы он точно дублировал код спутника. Приемник сравнивает разницу во времени между приёмом соответствующей части спутникового кода с такой же частью своего кода. Зная сдвиг по времени и скорость распространения радиоволн, приёмник получает расстояние до спутника, называемое псевдодальностью. Измеренные истинная даль-ность и псевдодальность схематично показаны на
В СНС НАВСТАР используется псевдо-дальномерный способ относительной привязки, а так же доплеровские методы определения скорости объекта. Дальность до спутников-ориентиров определяется с помощью псевдо-случайного кода. Для этого приемник генерирует свой внутренний код в то же самое время, чтобы он точно дублировал код спутника. Приемник сравнивает разницу во времени между приёмом соответствующей части спутникового кода с такой же частью своего кода. Зная сдвиг по времени и скорость распространения радиоволн, приёмник получает расстояние до спутника, называемое псевдодальностью. Измеренные истинная даль-ность и псевдодальность схематично показаны на
рис. 25.18, где 1 – ошибки часов спутника; 2 – ошибки, вызванные задержками сигналов в тропосфере, ионосфере и т.д.; 3 – ошибки часов приёмника.
Структура передаваемых сигналов спутниками СНС НАВСТАР.Все спутники СНС НАВСТАР излучают когерентные колебания на одинаковых частотах: f1 = 1575,42 МГц и f2 = 1227,6 МГц, кратными основной частоте часов спутника f0 = 10,23 МГц (154 и 120 гармоники частоты атомного стандарта колебаний, находящегося на борту каждого ИСЗ). При этом для аппаратурной реализации измерений псевдодальностей оба несущих колебания манипулированы по фазе по закону псевдослучайных двоичных цифровых последовательностей. Причём в качестве таких последовательностей используются так называемые М – последовательности, в которых число единиц и нулей может отличаться не более чем на один символ, что придаёт сигналу при кажущейся хаотичности чередования символов свойства широкополосного шума (рис.25.19). Псевдослучайный код содержит номер спутника (PRN).
 |

|
На каждом ИСЗ формируется подобным образом 2 кодированных сигнала:
- код PPS – сигнал точного определения места, защищённый от несанкцио-нированного использования сторонними потребителями навигационной информации и позволяющий производить навигационные измерения высокой точности;
- код SPS – сигнал стандартного определения места, открытый для пользо-вания всеми потребителями навигационной информации и предназначенный для местоопределения пониженной точности.
Рассмотрим указанные сигналы более подробно.
Сигнал PPS имеет тактовую частоту 10,23 МГц и период используемой кодовой последовательности 267 суток. Поэтому, не зная установленного начального состояния этого кода, раскрыть его, а значит, и воспользоваться им для навигационных определений практически невозможно. Каждому спутнику выделяется свой индивидуальный семисуточный интервал этой последовательности, что позволяет идентифицировать его сигнал в бортовых ПИ среди всех прочих ИСЗ системы. В конце каждой недели начальное состояние кода на каждом ИСЗ устанавливается по командам наземного комплекса управления. В соответствии с кодом PPS производится манипуляция фазы ±90° (от «1» до +90°, от «0» до –90°) колебаниями обеих частот f1 и f2, излучаемых спутниками. Для использования этого сигнала потребители навигационной информации должны предварительно засинхронизировать с высокой точностью свой эталон времени с единым временем системы НАВСТАР, а счислимое место объекта должно быть известно с точностью 2 – 3 мили.
Код SPS, являющийся по своей структуре кодом Голда, также устанавливается индивидуально для каждого спутника, но в отличие от PPS кода имеет существенно более короткий период равный 1 мс при тактовой частоте 1,023 МГц. В силу этого псевдодальномерные измерения с его использованием не вызывают затруднений даже в отсутствии априорной информации о местоположении объекта и о расхождении его эталона времени с временем системы НАВСТАР. Кроме того, кодом SPS каждые 6 с передаётся ключевое слово HOW, указывающее текущую фазу (состояние) PPS кода. Поэтому в бортовых ПИ, имеющих дешифратор слова HOW (допущенных к использованию навигационной информации повышенной точности), можно осуществить достаточно быстрое вхождение в код PPS. Фазовая манипуляция в соответствии с SPS кодом осуществляется только на одной несущей частоте f1 = 1575,42 МГц изменением фазы на 0°, 180°.
В целях восстановления в бортовых ПИ вектора местоположения спутника в пространстве на моменты измерения НП каждый спутник транслирует на тех же частотах f1 и f2 своё навигационное сообщение. Для передачи его также используется фазовая манипуляция частот f1 и f2 со скоростью 50 двоичных знаков информации в секунду.
Кадр навигационного сообщения содержит 1500 битов информации, передаётся в течение 30 сек и разбит на 5 подкадров, в каждом из которых содержится 10 слов по 30 битов.
В первом подкадре передаются данные телеметрического контроля, метки времени, параметры, используемой модели ионосферной рефракции, параметры коррекции шкалы времени данного ИСЗ.
Второй и третий подкадры отведены под эфемеридную информацию, позволяющую рассчитать местоположение ИСЗ на момент измерения НП. Эфемериды - это данные об исправности спутника и параметры его орбиты - коэффициенты, с помощью которых приемник вычисляет текущее и будущее положение спутника, используя математическую Кеплеровскую модель.
Четвёртый подкадр используется для передачи служебной информации.
Пятый подкадр содержит информацию об эфемеридах и коррекции часов всех ИСЗ системы – так называемый альманах спутников (хранится в памяти приёмника). Альманах имеет достаточно большой объём и поэтому передаётся в 25 кадрах.
Полный цикл передачи всего сообщения занимает 12.5 мин
Данные, содержащиеся в альманахе, позволяют осуществить быстрый поиск и захват сигналов рабочего созвездия из четырёх ИСЗ, обеспечивающего минимальное значение геометрического фактора, после приёма сигналов любого из спутников системы НАВСТАР.
Наземный комплекс управления СНС НАВСТАР решает в целом те же задачи, что и в СНС «Транзит», а именно: контроль за работой ИСЗ системы, слежение за спутниками и прогнозирование местоположений их на орбитах, закладка эфемеридной и служебной информации на ИСЗ, формирование единой шкалы времени СНС НАВСТАР и её синхронизация относительно шкалы UTC.
Наземная часть GPS состоит из 4 станций слежения, расположенных на тропических островах. Они отслеживают видимые спутники и передают данные (эфемериды) на Главную станцию управления и контроля (MCS) на авиабазе в Колорадо-Спрингс для обработки на сложных компьютерных программных моделях. Через наземные станции данные передаются обратно на спутники, а затем спутник передает их приемникам GPS.
Бортовая аппаратура потребителей навигационной информации СНС НАВСТАРобеспечивает:
выбор из всей совокупности видимых ИСЗ рабочего созвездия оптимальной пространственной конфигурации, обеспечивающего минимальное значение геометрического фактора и, следовательно, минимальные геометрические погрешности определения места;
поиск и слежение за радиосигналами ИСЗ, измерение РНП: времени задержки на трассе распространения и доплеровского сдвига частоты;
выделение из радиосигнала необходимой эфемеридной и служебной информации;
обработка полученных данных с целью расчёта координат и вектора скорости объекта, а также отклонения бортовой шкалы времени относительно шкалы времени НАВСТАР;
решение ряда дополнительных задач для обеспечения навигации по заданному маршруту движения;
индикация полученных результатов удобной для судоводителя форме.
В зависимости от требований к точности навигационного определения различных объектов, их динамических свойств в СНС НАВСТАР существуют различные типы бортовой аппаратуры (более подробно о различных типах приёмников GPS изложено подразделе 25.5 настоящей главы). Самые сложные из них и дорогостоящие выполняются по многоканальной схеме для одновременного слежения за радиосигналами нескольких ИСЗ рабочего созвездия. Наиболее распространённый для целей морского флота – вариант построения бортового ПИ, имеющего один приёмный канал, позволяющий производить радионавигационные измерения по четырём спутникам последовательно, а также использующий только одну из рабочих частот ИСЗ и код SPS стандартного определения места.
Процессы, происходящие в аппаратуре этого типа, протекают в общих чертах следующим образом (рис. 25.20).
После выбора на основании принятого альманаха оптимального созвездия ИСЗ осуществляется захват сигнала одного из них. На следующем этапе при измерениях РНП в генераторе кода бортовой аппаратуры формируется точная копия индивидуального кода SPS данного ИСЗ, привязанная к шкале времени бортового ПИ и управляющая работой фазового демодулятора ФМД приёмника. ФМД инвертирует фазу принимаемых колебаний ИСЗ при поступлении на него с генератора кода символа «1» и оставляет её без изменения при поступлении символа «0».
Таким образом, при совпадении во времени кода принимаемого сигнала и кода, сформированного в ПИ, на выходе ФДМ будет наблюдаться немодулированное колебание несущей частоты, излучаемой спутником, из которого с использованием схемы доплеровского следящего фильтра выделяется один из искомых РНП – доплеровский сдвиг частоты. При точном совпадении частот генератора, управляемого напряжением следящего фильтра ГУН, и принимаемой от ИСЗ на выходе фазового детектора ФД1, управляющее напряжение будет равно нулю, в то время как на выходе фазового детектора ФД2 оно достигнет максимального значения, что в конечном итоге вызовет срабатывание обнаружителя и будет сигнализировать о наличии синхронизма в измерительном канале ПИ. В этом случае схема управления временным положением кода прекратит выработку управляющего напряжения на сдвиг во времени кодовой последовательности, вырабатываемой генератором кода относительно меток времени шкалы ПИ. В режиме синхронизма в измерителе псевдодальности определяется временное рассогласование между метками времени бортового ПИ, отличающегося от времени НАВСТАР на неизвестную пока систематическую погрешность, и метками времени, выделяемыми в конечном итоге из принимаемого сигнала ИСЗ и несущими информацию о дистанции ИСЗ – судно. Результат этих измерений пропорционален мгновенному значению НП – псевдодальности до данного ИСЗ.
|

В дальнейшем приёмное устройство на основании эфемеридной информации из альманаха ИСЗ под управлением ЭВМ комплекса перестраивается на поиск сигнала следующего спутника рабочего созвездия, и процесс измерения НП повторяется.
После измерения четырёх псевдодальностей и четырёх псевдорадиальных скоростей и приведения разновременных определений НП к одному месту (зениту) решается ОНЗ с целью определения трёх пространственных координат объекта, вектора его скорости и расхождения временных шкал СНС НАВСТАР и бортового ПИ.
В дальнейшем, если это предусмотрено в данном типе бортовой аппаратуре, осуществляется переход на работу с кодом PPS точного определения места с использованием ключевого слова HOW кода SPS.
Погрешности ионосферной рефракции компенсируются известными методами при двухчастотной обработке сигналов ИСЗ, либо предвычисляются и исключаются в одноканальных ПИ с использованием модели ионосферы.
Точность определения места по СНС НАВСТАР. Следует отметить, что вопросы точности измерения можно рассматривать только в тех случаях, когда обеспечен устойчивый приём сигналов спутников. Так как принцип действия GPS основан на приёме сигналов со спутников, очевидно, что приёмник не будет работать под водой, под землей и в закрытых помещениях. Уменьшить точность могут также задержки сигнала в верхних слоях атмосферы, отражения сигнала от местных предметов и неблагоприятная геометрия размещения видимых спутников. Погода и время суток не влияют на качество приёма сигналов.
Имея сигнал трёх спутников, приёмник может определить только широту и долготу, т.е. двухмерные координаты. Принимая сигналы от большего числа спутников, приёмник уже может определить и высоту, и скорость, и направление движения. Чем больше спутников «видит» приёмник, тем точнее будут данные измерений. GPS спроектирована таким образом, что в любой точке Земной поверхности можно принимать сигнал не менее чем с четырех спутников.
Первоначально точность гражданских сигналов GPS была искусственно занижена (режим SA) и определить координаты с точностью выше 100м было невозможно. В мае 2000 года эти ограничения были сняты и теперь для современных гражданских 12-канальных приемников средняя точность измерений составляет 15м.
Точность можно увеличить путем введения дифференциальных поправок, передаваемых либо с геостационарных (не меняющих свое положение относительно поверхности земли) спутников или с помощью сети радиомаяков DGPS. Последний способ применяется в судовождении. Большинство моделей GPS-приёмников поддерживают подключение к ним DGPS-приёмников для автоматического уточнения измерений. Более подробно работа СНС НАВСТАР в дифференциальном режиме рассмотрена ниже.
Наиболее перспективные источники дифференциальных поправок – глобальные дифференциальные подсистемы, передающие поправку к сигналам GPS с геостационарных спутников. За их использование не предусмотрено какой-либо платы. К ним относятся американская система WAAS, европейская EGNOS и японская MSAS. Они улучшают точность определения местоположения GPS-приемниками до 1-3 м.
Американская система WAAS уже работает. В настоящее время зона покрытия этой системы - территория Северной Америки. Большое число моделей GPS-приемников GARMIN могут использовать дифпоправку WAAS при вычислении местоположения без какого-либо дополнительного оборудования.
Вертикальная точность примерно в 1,5 раза хуже горизонтальной, что связано с геометрией спутника. (Спутники чаще находятся рядом с горизонтом, чем прямо над ПИ).
Американская фирма «Trimble Navigation», известная как мировой разработчик и изготовитель спутниковых ПИ, даёт следующий список ошибок для коммерческих навигационных приёмников:
Ошибка часов спутника 0.6 м (d ч).
Эфемеридная ошибка - 0,6 м (d э).
Ошибка приемника - 1,2 м (d пр).
Атмосферная/ионосферная - 3,7 м (dраспр).
Избирательная доступность - 7,6 м (dдост).
Полная d =  4,5 м - 9,0 м (без режима SA).
4,5 м - 9,0 м (без режима SA).
Прогнозируемая точность рассчитывается путем умножения приведённого выше числа на GDOP (геометрический фактор), который обычно находится в пределах от 4 до 6. Это даёт точность порядка 30 метров.
Точность определения составляющей вектора скорости -– 0,2 м/сек.
Упомянутая точность относится к одночастотным навигационным приёмникам, которые способны измерять положение раз в секунду или около того.
Точные измерения достигаются с помощью гораздо более сложного оборудования, которое используется в геодезии и топографии. Эти системы используют обе частоты и различные измерения, сравнивают данные от движущегося приемника с данными от неподвижного приёмника в известной точке. Они также усредняют результаты измерений за период времени. В этих измерениях в действительности с большой точностью определяется разница в положениях фиксированного и движущегося приёмников, а не абсолютное положение любого из них.
Избирательная доступность СНС НАВСТАР. Избирательная доступность – это преднамеренное ухудшение точности определения места по СНС с целью не дать потребителю воспользоваться полной точностью GPS с тактическими целями. На начальном этапе эксплуатации GPS был включен так называемый режим SA (Selective Availability). Военные приёмники использовались зашифрованным PPS кодом для получения заданной точности вне зависимости от состояния режима SA. Точность определения места для гражданских пользователей была не выше 100 м.
Режим SA выключался только во время вторжения американских войск на Гаити в основном потому, что военные не имели достаточного количества военных приёмников.
В начале февраля 1996 года правительство США приняло закон, который потребовал от военных выключить режим SA к 1 мая 1996 года. Первый законопроект, в который был включен этот пункт, не прошел, но он был включен в другой законопроект, который был подписан президентом.
В мае 2000 года эти ограничения были сняты.
Система GPS принадлежит Министерству обороны США и её гражданский сегмент может быть отключен как полностью, так и по регионам при наличии угрозы национальной безопасности США, о чем неоднократно официально заявлялось.
В каждом руководстве к приёмнику GPS имеется предупреждение о том, что, используя приёмник для навигации, пользователь должен всегда быть готов ориентироваться без GPS, в связи с тем, что производители снимают с себя ответственность за любые последствия отказов их устройств и\или системы GPS.
25.4.4. Спутниковая навигационная система ГЛОНАСС
 Среднеорбитальная космическая навигационная система ГЛОНАСС (Россия) предназначена для навигационного обеспечения гражданских морских судов и самолётов, определения координат указанных потребителей в любом районе Земной поверхности независимо от времени суток и метеоусловий. СНС ГЛОНАСС аналогична по своим характеристикам и возможностям СНС НАВСТАР.
Среднеорбитальная космическая навигационная система ГЛОНАСС (Россия) предназначена для навигационного обеспечения гражданских морских судов и самолётов, определения координат указанных потребителей в любом районе Земной поверхности независимо от времени суток и метеоусловий. СНС ГЛОНАСС аналогична по своим характеристикам и возможностям СНС НАВСТАР.
По проекту до состава системы входит 24 ИСЗ, которые должны находиться в трёх орбитальных плоскостях с углом наклона 64,8°, на высоте 19100 км (см. рис. 25.21).
Навигационные ИСЗ системы ГЛОНАСС излучают два вида радиосигналов: сигнал стандартной точности (СТ) и сигнал высокой точности (ВТ). Сигнал СТ обеспечивает потре-бителей определением следующих параметров:
- плановых координат – 28 м;
- высоты – 60 м;
- определение составляющей вектора скорости -– 0,2 м/сек;
- временем – 700 наносекунд.
В связи с выбранным наклоном орбит система ГЛОНАСС потенциально превышает по своим характеристикам систему GPS в приполярных широтах.
В системе ГЛОНАСС реализовано частотное разделение сигналов каждого навигационного ИСЗ. Каждый спутник ГЛОНАСС использует две несущие частоты в диапазоне L, которые в отличие от GPS имеют различные частоты для каждого спутника. Диапазон L1 охватывает от 1602,5625 МГц до 1615,5 МГц с шагом 0,5625 МГц (для гражданских потребителей), а диапазон L2 охватывает от 1246,4375 до 1256,5 МГц с шагом 0,4375 МГц. Таким образом, генерируются 24 частотных канала для каждого диапазона. Каждый из этих сигналов модулирован: частота модуляции 5,11 МГц для точного кода и 0,511 для грубого кода. На L1 сигналы кодируются по точному и грубому коду, на L2 – только по точному коду. Точный код представляет собой псевдослучайную последовательность с периодом 1 сек., грубый код является псевдослучайной последовательностью с периодом 1 мсек. В отличие от GPS, где все коды уникальны для каждого спутника, в системе ГЛОНАСС для всех спутников используется единый код. Приёмники ГЛОНАСС, также как и приёмники GPS, вырабатывают такой же точный или грубый коды. Время передачи определяется путём измерения времени расхождения между кодом, полученным от спутника, и кодом который генерирует приёмник.
В настоящее время спутники, которые входят в состав системы ГЛОНАСС, функционируют не полностью, что создаёт определённые трудности для потребителей (ухудшение точности, разрывы в обслуживании). Использование этой системы в качестве самодостаточной системы является проблематичным. Система ГЛОНАСС не обеспечивает мгновенных предупреждений о неисправности системы.
На смену системы ГЛОНАСС в России разрабатываются космические навигационные системы ГЛОНАСС-М, ГЛОНАСС-К с улучшенными тактико-техническими характеристиками ИСЗ.
Сравнительные характеристики систем GPS и ГЛОНАСС приведены в табл. 25.3.
Табл. 25.3
| Характеристика | GPS | ГЛОНАСС |
| Количество ИСЗ Количество плоскостей орбит Наклон площадей орбит, град Радиус орбит, км Несущие частоты, МГц L1 L2 Точность определения (СКП) Плановых координат, м Высоты, м Скорости, м/с Времени, мкс Частота последовательности импульсов, МГц С/А Р Системное время Опорная система координат | 24+3 (резервный) 1575,42 1227,60 0,2 0,34 1,023 10,23 UTC(USNO) WGS-84 | 24+3 (резервный) 64.8 1602,5625…1615,500 1246,4375…1256,500 0,15 0,7 0,511 5,11 UTC(SU) ПЗ-90 |
25.4.5. Дифференциальный режим работы GPS и ГЛОНАСС
Находящиеся в эксплуатации спутниковые навигационные системы GPS и ГЛОНАСС были одобрены IMO в качестве компонентов Всемирной радионавигационной системы. При одобрении систем GPS и ГЛОНАСС IМО отметила неспособность каждой из них обеспечить в штатном режиме точность, необходимую для безопасной навигации судов на подходах к портам и в других водах, в которых свобода маневрирования ограничена (точность определения места в таких районах по требованиям IMO должная составлять менее 10 м).
Другой отмеченный недостаток этих систем связан с их неспособностью в данное время обеспечивать оперативное оповещение потребителей о нарушениях в работе систем или их элементов, которые происходят пока довольно часто.
Наиболее рациональным путем устранения указанных недостатков и улучшения основных характеристик систем GPS и ГЛОНАСС, необходимых для расширения их функциональных возможностей, является применение дифференциального режима работы этих систем (DGPS), что позволяет добиться повышения точности, надежности и эффективности радионавигационного обеспечения в рабочих зонах дифференциальных подсистем СНС. Для этой цели, а также для обеспечения проведения геодезических работ, на берегу устанавливаются контрольные ПИ системы и передатчики для проведения коррекции измерений на судне в реальном масштабе времени. DGPS исключает ошибку, которую вносит избирательная доступность, и ошибки, вызываемые изменениями в ионосфере, что приводит к точности определения местоположения менее 10 метров. Реальная точность DGPS определений составляет 1 – 5 м.
Идея дифференциального метода коррекции координат заключается в том, что приёмная аппаратура спутниковых систем устанавливается, на так называемых, опорных (контрольных) станциях, координаты которых определены геодезическим способом и точность привязки в данной системе координат значительно превышает точность определения места по навигационной системе.
Таким образом, принимая измерительную информацию, на станции появляется возможность вычислять дифференциальные поправки к координатам, или радионавигационным (навигационным) параметрам. Эти поправки практически постоянны на некотором удалении от опорной станции, т. е. в некотором дифференциальном районе. Поправки радиотехническими методами передаются в приёмную судовую аппаратуру для получения более точных координат, поэтому в судовых ПИ имеется специальный дифференциальный блок. В системе DGPS принято рассчитывать поправки к псевдодальностям, так как неизвестно, какое созвездие спутников применяет пользователь системы для определения места судна.
Поправки можно использовать в двух режимах:
1. Для неподвижных объектов является несущественным использование дифференциальных поправок в реальном масштабе времени и они могут запоминаться и применяться в дальнейшем для обработки навигационной информации.
2. Для движущихся объектов, которыми являются суда, необходимо применение поправок в реальном масштабе времени.
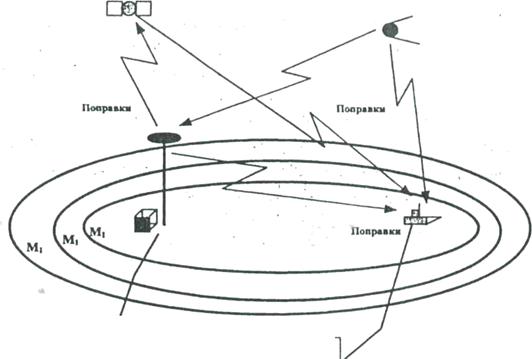
Состав дифференциальной подсистемы представлен на рис. 25.22.
Каналы связи могут быть наземные, например, в частотном диапазоне радиомаяков, или через геостационарные спутники (ИНМАРСАТ).
Наибольшее распространение имеет сеть опорных станций, расположенных на уже действующих радиомаяках (рабочие каналы морских радиомаяков находятся в диапазоне 283,5-325кГц).
Радиомаяки получают вторую жизнь, работая в режиме дифференциальной GPS или ГЛОНАСС. Частотный канал для передачи поправок обычно сдвинут на величину около 0,5 кГц относительно основной частоты. На размеры зоны оказывают влияние те же факторы, что и на дальность действия обычного радиомаяка маяка в режиме пеленгования (в среднем 100 миль). Это очень важно для потребителей, так как дифференциальная зона «дышит» в зависимости от условий распространения радиоволн, и на её границах приём может оказаться неустойчивым. С удалением от опорной станции точность определения места падает, т. е. в соответствии с рисунком 25.22 М1 < М2 < М3,
где М1, М2, М3 - средние квадратические погрешности определения координат в соответствующих зонах.
|
|
|
|
|
|
|
|
Морские дифференциальные подсистемы СНС, работающие непрерывно, обеспечивают передачу потребителям дифференциальных сообщений в формате, соответствующем стандарту RTCM-104 (Radio Technical Comission for Marine Services). При этом обеспечивается возможность получения надежных навигационных определений в реальном масштабе времени с интервалами не более 5-10 с. В Стандарте RTCM-104 задаётся число различных посылок данных в двоичном формате. Первый набор сообщений (от 1 до 17) предназначен для навигационных приемников, отслеживающих код C/A, и дает точность примерно 10 метров. Они вносят коррекции на ионосферу и другие ошибки, но имеют свойственную коду C/A ошибку дискретизации. Сообщения 18 - 21 относятся к фазовой коррекции несущей GPS и используются для наблюдений.
В сигналах опорных станций транслируются 16 видов данных, но непосредственно для навигации используются сообщения типа 1 с общей информацией, которая включает в себя:
1. Идентификатор опорной станции.
2. Расписание передачи информации.
3. Объём передачи информации.
4. Техническое состояние опорной станции.
Затем передаются поправки к псевдодальностям по каждому спутнику отдельно в фазовых циклах по следующей форме:
 ,
,
где dФ(t0) – поправка к псевдодальности в момент t0,
 - приращение поправки за время (t-t0).
- приращение поправки за время (t-t0).
Далее следуют:
- идентификатор спутника;
- техническое состояние спутника;
- возраст информации;
- предполагаемая погрешность навигационного параметра.
Если произошла коррекция орбитальных данных спутника или произведена временная синхронизация системы, то в течение некоторого времени допол-нительно передаётся поправка за изменение данных dФ (сообщения типа 2):
 .
.
В США, Канаде, Украине, России и многих других странах дифференциальные передачи радиомаяков бесплатны. В Великобритании и некоторых других странах услугами морской службы DGPS можно воспользоваться только по подписке.
Существуют также коммерческие передачи DGPS, осуществляемые другими средствами (через VHF или UHF радиостанции или спутник связи, или на поднесущей FM радиостанции), воспользоваться которыми можно, только уплатив подписной взнос. Некоторые из них обеспечивают точность 1 метр или лучше при наличии специального приемника GPS.
Важным достоинством реализации дифференциального режима является возможность обеспечения контроля целостности рабочего созвездия спутников, используемого для навигационных определений, и оперативной передачи потребителям информации о целостности.
Область применения дифференциального режима для судов транспортного, рыбопромыслового, речного флотов достаточно широка.
Применение СНС в стандартном режиме работы, т.е. при работе по сигналам стандартной точности в штатном режиме, практически удовлетворяет требованиям к навигационному обеспечению судов в части точности, доступности и рабочей зоны при плавании в открытом море. При использовании их в дифференциальном режиме в рабочей зоне дифференциальной системы удовлетворяются все основные требования к навигационному обеспечению судов на всех этапах плавания.
При использовании дифференциального режима работы СНС решаются следующие специальные навигационные задачи:
- обеспечение высокоточного судовождения на внутренних водных путях (реках, озерах и водохранилищах);
- рыбный промысел в прибрежных водах, узкостях и в районах со сложной навигационной обстановкой;
- высокоточный промер глубин в прибрежных водах и узкостях;
- точное выставление и контроль за местоположением плавучих средств навигационного ограждения, как на море, так и на реках и в узкостях;
- прокладка кабелей и трубопроводов, как в прибрежных водах, так и в открытом море;
- геодезические и другие научные исследования в любых районах мира;
- обеспечение добычи полезных ископаемых и проведения необходимых изыскательских работ.
Ряд стран Балтийского моря (Польша, Финляндия, Швеция, Дания и Эстония) установили сеть опорных станций, зона действия которых охватывает большую часть Балтийского моря.
Согласно принятой в США программе развития дифференциальной подсистемы, предусматривается развёртывание 52 опорных станций, зона действия которых охватывает все прибрежные воды США. 23 таких станции планируется разместить в Канаде, что позволит обеспечить высокоточными навигационными измерениями внутренние водные пути Великих озер, реки Святого Лаврентия.
Совместное использование СНС ГЛОНАСС и GPS получило название GNSS = GPS + ГЛОНАСС. Такое совместное использование позволяет повысить точность и надёжность определений за счёт увеличения числа наблюдаемых спутников. В Англии разработан и успешно прошёл испытания 20-канальный приёмоиндикатор САА-ISN для GNSS в дифференциальном режиме (DGNSS), который работает через опорные станции Ski Fix с каналом связи для передачи поправок через геостационарные спутники системы ИНМАРСАТ. Для расчёта координат применяется референц-эллипсоид WGS-84. В Украине разработан и успешно эксплуатируется приёмоиндикатор аналогичного типа - СН-3101 (см подраздел 25.5.1)
25.4.6. Европейская навигационная глобальная служба – EGNOS
Большой интерес представляет создание и ввод в эксплуатацию европейской ГНСС «Галилео» как компонента Всемирной радионавигационной системы (ВРНС), требования к которой изложены в резолюции IMO.
ГНСС создаётся в 2 этапа:
- GNSS-1, первое поколение системы, которая которой будет основываться на использовании сигналов СНС НАВСТАР и ГЛОНАСС и дополнением этих созвездий спутниками таких подсистем, как EGNOS в Европе, а так же подобными подсистемами WAAS (США) и MSAS (Япония).
- GNSS-2, второе поколение системы, которая будет обслуживать гражданских потребителей и находиться целиком под контролем гражданских служб.
GNSS-1 состоит из:
- среднеорбитальной СНС GPS (США);
- среднеорбитальной СНС ГЛОНАСС (Россия);
- 4-х взаимодействующих геостационарных спутников: трёх ИНМАРСАТ-3 и одного Artemis.
Разработанный для безопасности морского, воздушного и наземного транспорта проект EGNOS обеспечит потребителям доступ до различных видов обслуживания, таких как:
- обеспечения дополнительной информации о местоположении подобно штатным режимам действующих СНС;
- информации о целостности – в случае аномальной передачи данных от спутников СНС НАВСТАР и ГЛОНАСС в зоне их действия, EGNOS будет посылать сигналы уведомления, которые будут приниматься каждые 6 секунд, до тех пор, пока эти спутники могут передавать ошибочную информацию до устранения неполадок либо нейтрализации или реконфигурации данных.
- служба дифференциального управления – EGNOS улучшит точность измерений, которая обеспечивается системами GPS и ГЛОНАСС за счёт уменьшения ионосферных ошибок и управления эфемеридами спутников и тем самым исключить влияние преднамеренного загрубления точности GPS;
- доступности и непрерывного обслуживания - спутники EGNOS на геостационарных орбитах обеспечат перекрытие всего часового пояса Европы и улучшения геометрического фактора системы;
- обслуживания по высокоточному временному обеспечению.
В наземные средства EGNOS будет входить до 30 станций мониторинга (RIMS) и 4 контрольных центра (МСС), размещённых в Испании, Великобритании, Германии и Италии.
25.5. АППАРАТУРА ПОТРЕБИТЕЛЕЙ СПУТНИКОВЫХ НАВИГАЦИОН-
НЫХ СИСТЕМ
Точное определение местоположения судов без применения системы глобального позиционирования крайне затруднено, а во многих случаях практически невозможно. Это делает её незаменимой в индустрии морских транспортных перевозок.
Аппаратура потребителей в этих случаях может быть представлена в виде:
Навигационных комплексов для судоходства, включающих в себя в основном оборудование лидера в области GPS-приборов американской компании Trimble (серия приборов DSM 12/212, 4000 Rsi/Dsi и др.) и обеспечивающих получение информации о координатах местоположения объекта и отображение на морских электронных картах в формате S57/DX90.
Гидрографических промерных комплексов, состоящих из цифрового эхолота, GPS-прибора, программного геоинформационного обеспечения, функциони-рующего на персональном компьютере, который объединяет работу всех составных частей. С помощью комплексов выполняются работы по съёмке рельефа дна у причалов, в каналах и на других участках акватории портов с целью принятия решений при инженерных изысканиях, проектировании, строительстве, проведении дноуглубительных и других работ.
Систем лоцманской проводки судов в портах, включающих базовую станцию обработки DGPS-поправок, передающую УКВ-радиоаппаратуру для передачи поправок, портативные комплекты для лоцмана. Системы обеспечивают точность позиционирования до 1 м и позволяют выполнять лоцманскую проводку, швартовку судов в порту в любых погодных условиях.
Систем диспетчерского управления и контроля транспортных средств (Automatic Vehicle Location), предназначенных для обеспечения оперативного контроля и управления транспортными средствами предприятия, для обеспечения безопасности при перевозке особо опасных грузов, ценностей, пассажиров и т. д. Системы функционируют следующим образом: на транспортные средства устанавливается бортовой комплект, включающий GPS-прибор, контроллер, средство передачи информации, с помощью которого осуществляется определение текущих координат, скорости, курса, сбор информации о состоянии датчиков. Всё это обрабатывается и передаётся в диспетчерский центр, где осуществляется визуальный контроль за местонахождением и состоянием подчинённых транспортных средств по электронной карте местности.
В странах СНГ для работы с низкоорбитальными СНС «Цикада-М», «Цикада», а так же американской системой «Транзит» (см. подраздел 25.3 настоящей главы) используется следующая аппаратура для морских потребителей: СЧ-1, СЧ-2, СЧ-3 («Чёлн»), «Бирюса-СН», «Бирюса-СН2», АДК-3, «Шхуна». Однако с введением в эксплуатацию систем ГЛОНАСС и GPS данная аппаратура не стала удовлетворять требованиям потребителей и в настоящее время её производство практически приостановлено.
Для работы с системой ГЛОНАСС в разное время разрабатывалась и поставлялась аппаратура для морских потребителей: «Шкипер», «Бриз», «Чёлн-4», «Навигатор».
Для использования современных спутниковых ПИ одним из главных требований к ним выдвигается то, что они должны принимать сигналы как от системы ГЛОНАСС, так и от GPS. Серийную аппаратуру такого класса (серия СН) производит ГП «Оризон-Навигация» (Украина, г. Смела).
Из зарубежных образцов, как пример, можно назвать ПИ типа «Trimble» (США), «Furuno», «JMC» и «JRC» (Япония).
Все модели GPS - приёмников, начиная с самых дешевых, как правило, имеют следующий набор базовых возможностей:
- определение прямоугольных (x, y), геодезических координат (широта, долгота) и высоты над уровнем моря.
- определение сторон света, дирекционного угла на точку и работа в режиме «компаса»
- поддержку нескольких систем координат (datum) и возможности задания пользовательской, что является необходимым условием использования приёмников с электронными картами различных производителей;
- определение текущей, средней, максимальной скорости;
- занесение в память приёмника координат выбранных точек (way points);
- определение направление движения;
- определение расстояния до выбранной точки и ориентировочное время пути, исходя из текущей (или средней за период) скорости;
- запись в память устройства пройденного маршрута с возможностью обратной его прокрутки;
- индикация точного местного времени, времени заката и рассвета;
- определение пройденного пути;
- интерфейс к PC для загрузки выбранных путевых точек маршрутов. Возможен мониторинг местоположения прямо на экране компьютера, но для этого может понадобиться или карманный компьютер, или ноутбук.
25.5.1. Приёмоиндикатор СН-3101
Навигационная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС и NAVSTAR СН-3101 производится на Украине (г. Смела) и предназначена для непрерывной, автоматической выработки текущих значений координат места, времени и путевой скорости кораблей и судов по радиосигналам стандартной точности СНС ГЛОНАСС и GPS NAVSTAR в любой точке земного шара, в любой момент времени, независимо от метеоусловий, а также выдачи их на устройство индикации и, по стандартному интерфейсу, внешним потребителям с дискретностью не менее 1 с.
Приёмоиндикатор СН-3101 обеспечивает решение следующих задач:
- Автоматический выбор оптимального, с точки зрения ожидаемой точности, созвездия ИСЗ ГЛОНАСС и GPS. При работе в совмещенном режиме, автоматический поиск, захват навигационных сигналов спутников и в режиме слежения за ними измерение навигационных параметров, приём навигационных сообщений, используемых для однозначных навигационных определений без ввода начальных данных;
- автоматическую непрерывную выработку координат, времени и вектора путевой скорости движения потребителя по сигналам СНС ГЛОНАСС, GPS NAVSTAR, при совместной обработке сигналов СНС ГЛОНАСС и GPS NAVSTAR;
- выдачу на индикацию с дискретностью 1 с текущих координат в системе координат ПУЛКОВО 1942 года, на общеземном эллипсоиде 1990 года (ПЗ-90), в системе координат WGS-84 или в местной системе координат;
- оценку прогнозируемой точности определения координат;
- приём, хранение и обновление альманахов СНС ГЛОНАСС и GPS NAVSTAR;
- автоматический выбор ИСЗ СНС ГЛОНАСС и GPS NAVSTAR с учётом их технического состояния;
- автоматический контроль функционирования аппаратуры, тестовый контроль функционирования аппаратуры, индикацию неисправностей;
- отображение на экране приёмоиндикатора признаков режимов работы аппаратуры, вводимых и выводимых параметров;
- запоминание текущих координат в качестве координат маршрутной точки. Ввод и хранение до 500 маршрутных точек, до 50 маршрутов движения;
- определение пеленга и расстояния от текущей точки до любой из маршрутных точек или между двумя любыми выбранными точками;
- движение по маршруту с выработкой параметров отклонения от маршрута;
- сопряжение с внешними приборами и системами по интерфейсу RS-232;
- решение навигационной задачи при работе в дифференциальном режиме. Приём, учёт и коррекция информации в соответствии с рекомендацией RTCM SC-104.
Внешний вид приёмоиндикатора СН-3101 показан на рис 25.23.

|
Основные технические характеристики приёмоиндикатора СН-3101
Навигационная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС и NAVSTAR СН-3101 обеспечивает работу по сигналам СНС ГЛОНАСС или GPS NAVSTAR, или по сигналам этих двух систем одновременно. В аппаратуре применяется 14-ти канальный цифровой приемник, позволяющий одновременно принимать 14 спутниковых навигационных сигналов данных систем. Для определения текущих значений навигационных параметров используются все «видимые» спутники. При уменьшении количества «видимых» спутников до 3-х, аппаратура переходит из режима трехмерных определений координат (3D) в режим двумерных определений координат (2D) в горизонтальной плоскости.
Принимаемые сигналы: ГЛОНАСС: L1-диапазон (СТ-код),
GPS: L1-диапазон (С/А-код).
Точность определения навигационных параметров (СКП):
автономные определения: GNSS - 10-12 метров,
ГЛОНАСС - 10-15 метров,
GPS - 25-40 метров;
дифференциальный режим: 1-3 метра.
Точность определения скорости - 0,2 узла (0,1 м/сек).
Время начального определения:
при «холодном старте» не более 180с.
при «горячем старте» не более 90с.
Для облегчения оценки точности текущих значений навигационных параметров аппаратура вырабатывает оценку СКП, при расчёте которой используются практически все факторы, влияющие на точность.
Частота обновления координат 1 раз в секунду.
Время возобновления выработки навигационных параметров после кратковременного (до 20 с) пропадания радиовидимости навигационных спутников, не более 4 - 6 с.
Активная антенна, всенаправленная в верхней полусфере.
Длина антенного кабеля 50 метров.
Питание: переменный ток 110/127/220 В, 50 Гц, постоянный ток 9-30 В.
Потребляемая мощность не более 7,5 Вт.
Аппаратура СН-3101, благодаря технологиям, заложенным в неё, надёжно работает при любых погодных условиях, устойчиво принимает данные от спутников и выдает стабильные показания даже при сильной продольной и поперечной качке в штормовых условиях.
Конструкция приёмника имеет поворотную подставку с отверстиями для крепления, что даёт возможность установки прибора в любом удобном для пользователя месте. Выбор режимов работы и набора выходных параметров осуществляется при помощи подсвечиваемых клавиатуры и дисплея.
Состав аппаратуры:приёмоиндикатор, блок антенный, сетевой адаптер, комплект кабелей.
Органы управления.
Реализация функций приёмоиндикатора осуществляется с помощью органов управления, расположенных на передней панели ПИ:
- вывод на дисплей ПИ соответствующих формуляров (клавишиNAV, WPT, TRK, SND, AUX, INF, ST, F).
- управление маркером (клавиши « < », « > », « /\ », « \/ »);
- изменение значения параметра (клавиши «0....9»);
- перевод аппаратуры из режима выбора параметра в режим редактирова-ния значения параметра и наоборот. Ввод значения параметра в память ПИ (клавиша " ENTER);
- выбор режима подсветки клавиш и дисплея ПИ (клавиша «â»). Последовательным нажатием этой клавиши оператор может задать один из трёх режимов подсветки:
Подсветка дисплея включается примерно на 15 секунд после любых действий с органами управления ПИ.
Параметры, входящие в состав формуляра, разделяются на индицируемые и вводимые. Индицируемые параметры не могут быть изменены оператором. Вводимые параметры допускают как просмотр, так и изменение своих значений.
Внутри формуляра возможны два режима работы системы ввода-вывода - режим выбора параметра и режим редактирования параметра.
В режиме выбора параметра можно перемещать маркер между параметрами. При этом вид маркера зависит от типа параметра.
Работа аппаратуры.
После включения аппаратура автоматически производит поиск и принятие решения о приёме (захвате) навигационных сигналов ИСЗ. В режиме слежения за сигналами она производит измерение навигационных параметров и приём навигационных сообщений, полученные данные используются для навигационных определений. При этом производятся выработка и выдача координат места, времени и вектора путевой скорости потребителя.
Аппаратура может работать по СНС ГЛОНАСС (режим «GLON»), по GPS NAVSTAR (режим «GPS») или по двум системам одновременно (режим «GNSS»).
Излучаемые с борта ИСЗ сигналы на частотах около 1,6 ГГц принимаются ПИ, предварительно фильтруются, усиливаются по ВЧ и поступают на плату синтезатора ПВ, входящего в состав ПИ. На плате синтезатора происходит основное усиление и преобразование их в цифровой код отдельно для каждой системы. Затем сигнал в цифровом коде используется для измерения навигационных параметров и выделения навигационного сообщения. Полученные данные поступают на навигационный процессор ПВ, где производится программная обработка навигационного сигнала, решается навигационная задача и выдача результатов решения на дисплей и внешним потребителям.
Текущие координаты определяют положение антенны в текущий момент времени. К текущим координатам можно отнести и высоту антенны. Высота антенны, в зависимости от установки потребителем параметра «Geoid Alt» в формуляреAUX, измеряется над уровнем геоида, или над уровнем эллипсоида.
Аппаратура позволяет вырабатывать координаты в 4-х системах: (WGS-84, ПЗ-90, SK - 42, в локальной (местной) системе координат).
Оценка прогнозируемой точности координат представляет собой величину прогнозируемой средней квадратической погрешности (СКП) выраженной в метрах.
Аппаратура работает по всемирному координированному времени с учетом поправки на местное время, вводимой оператором. Время обновления данных - не менее 1 с. Местное время вырабатывается встроенным таймером и корректируется по сигналам ИСЗ.
При наличии дифференциальных поправок для четырех и более ИСЗ, участвующих в определении координат, индицируется признак работы в дифференциальном режиме (символ D).
Поправка на часовой пояс (разность между временем в текущем часовом поясе и временем по Гринвичу) задается оператором и может вводиться с точностью до минут.
Кроме выполнения основной навигационной задачи в аппаратуре предусмотрено выполнение дополнительных сервисных задач:
- прогноз ИСЗ (в формуляреSНD);
- обмен навигационной информацией с внешними потребителями (в форму-лярахAUX и F);
- статистическая обработка координат места судна (в формуляре ST);
- выработка аппаратурой рекомендаций при движении по маршрутным точкам (в формулярахWPT, TRK).
Решение дополнительных сервисных задач, а также приём и учёт дифференциальных поправок (при работе в дифференциальном режиме) и обмен информацией с внешними потребителями производятся параллельно с решением основой навигационной задачи.
Включение аппаратуры.
1 Тумблеры "СЕТЬ" и "РЕЗЕРВ" на сетевом адаптере - в положении "ВКЛ".На ПИ нажать клавишу "ON". Аппаратура должна включиться и, примерно через минуту, на дисплей ПИ будет выведен навигационный формулярNAV.
Допустимое значение СКП задается в формуляреAUX1. При включении аппаратуры допустимое значение СКП автоматически устанавливается равным 200 м.
Далее аппаратура начнет поиск ИСЗ, находящихся в зоне радиовидимости, захват, синхронизацию и через 2-3 минуты на экране дисплея ПИ высветится полная навигационная информация, которая в дальнейшем будет обновляться с дискретностью в 1 секунду.
Определение основных навигационных параметров.
Вывести на дисплей ПИ формулярNAV1 (нажать клавишу «NAV»), при этом, на дисплей ПИ будут выведены текущие координаты положения антенны ПИ - широта, долгота и высота.
Информация о времени находится в формуляре NAV2. Для вывода информации о времени - повторно нажать клавишу "NAV".
При помощи редактируемых параметров формуляра "NAV" оператор может:
- задать режим работы аппаратуры по системам "GPS", "GLON" или "GNSS";
- выбрать систему координат;
- ввести поправку местного времени.
Ниже приводится отображение навигационной информации в формулярах NAV1иNAV2
Информационный формуляр NAV1.
В зависимости от режима индикации координат формуляр имеет вид с возможными вариантами отображения координат:
- широта и долгота в градусах, - широта и долгота в градусах,
минутах, долях минут: минутах, секундах, долях секунд:
| |||
|
- номер зоны и координаты X, Y в картографической проекции ГАУССА:
|
Первая строка:
- широта (N-северная, S-южная) или координата X в картографической проекции ГАУССА;
- режим работы аппаратуры «GLON», «GPS» или «GNSS» (параметр вводимый);
- признак работы в дифференциальном режиме D.
Если количество ИСЗ, на которые есть поправки, более трех - индицируется признак дифференциального режима работы аппаратуры (D). В других случаях - пробел.
Вторая строка:
- долгота (E-восточная, W - западная) или номер зоны и координата У в картографической проекции ГАУССА;
- система координат WGS-84, PZ-90, SK-42, Local (параметр вводимый).
Третья строка:
- путевой угол, град;
- скорость, уз.
Четвертая строка:
- прогнозируемая СКП координат, метры («rms ****» –значение СКП более 200 метров);
- текущее время часы, минуты, секунды.
Пятая строка - высота антенны над уровнем геоида или эллипсоида, метры.
Информационный формуляр NAV2.
|
Первая строка - поправка местного времени часы, минуты, со знаком «+» восточнее и со знаком «-» западнее Гринвичского меридиана (параметр вводимый).
Вторая строка - местное время, часы, минуты, секунды.
Третья строка - местная дата, число, месяц, год.
Четвертая строка:
- время работы прибора от момента включения, часы, минуты, секунды;
- наработка прибора с момента первого включения, часы.
25.5.2. Приёмоиндикаторы NT-серии («Trimble», США)
В качестве модификаций приёмоиндикаторов NT-серии («Trimble», США) могут применяться приёмоиндикаторы NT-100, NT-200, NT-200D, NT-200G, имеющие незначительные различия между собой. Работу указанных типов ПИ рассмотрим на примере приёмника NT-GPS, установленного на тренажёре NAVI-SAILOR Киевской государственной академии водного транспорта.
Передняя панель - операторский интерфейс системы NT GPS. Она снабжена дисплеем для передачи информации от пользователя к GPS.
Расположение органов управления изображено на рис. 25.24.
Дисплей – LCD экран 320 ´ 240 пикселей, который просматривается при любом освещении.
Кнопка POWER - для включения/выключения питания NT GPS, а также для ввода режима инсталляции, который требуется для ввода настроечных данных (при нажатии её держится нажатой кнопка SETUR).
Кнопка BRT – регулировка яркости дисплея.
Кнопка CON – регулировка контрастности.
Кнопки от 0 до 9 – используются для ввода цифровых данных на различных экранах. Кнопка » используется для перемещения курсора между полями и для завершения операций на полях цифровых данных.
Кнопки управлением курсора – кнопки-стрелки – управляют движением курсора на тех же экранах, где воспроизводится курсор.
На экранах SETUP, WAYPT и ROUTE кнопки-стрелки вверх/вниз используются для перемещения курсора между пунктами меню, которые могут быть изменены пользователем, а кнопки-стрелки влево/вправо используются для редактирования или изменения данного пункта.
Кнопки SETUP, STATUS, NAV, SAVE, WAYPT и USER используются для доступа к различным функциям NT GPS и рабочими режимами.
|
SETUP – открывает доступ к различным экранам, которые позволяют настраивать работу NT GPS.
STATUS – выводит дополнительную информацию по рабочему состоянию GPS, такую как сила сигнала и принимаемые операционные сообщения, а также настройки, выбранные на различных экранах SETUP.
NAV – сначала выводит NAV1, при втором нажатии выводится NAV2. Эти экраны обеспечивают два разных способа для наблюдения за навигационными данными.
SAVE – нажатие этой кнопки выводит текущую позицию и время, предоставляет пользователю выбор, с помощью программированной клавиши – soft key, либо ввода этой позиции как аварийной цели, например, функция «Человек за бортом».
WAYPT – по этой кнопке открывается доступ к библиотекам путевых точек и маршрутов. С помощью этой функциональной кнопки можно просмотреть, добавить или отредактировать путевые точки и маршруты.
Пять клавиш (программированные клавиши soft key), расположенных справа от дисплея, и отмеченных горизонтальными линиями, предназначены для вызова выборов меню. Функции, которые они выполняют при простом нажатии, могут изменяться при переходе с одного экрана на другой. Функция, связанная с отдельной клавишей, указывается отметкой, которая появляется возле клавиши в правой части экрана.
MENU – если выборы меню накрывают или затемняют часть экрана, их можно убрать нажатием кнопки MENU. Вызов их на экран осуществляется повторным её нажатием. Если отметки клавиш скрыты, то при нажатии кнопки MENU они появятся.
PLOT – вывод на дисплей электронной карты (кроме NT-100), либо сетки в проекции Меркатора.
Текущий режим работы указывается в правой части заголовка экрана. Индикаторами режимов являются: DGPS, GPS, DR и EXT.
После включения приёмник NT GPS начинает автоматически определять место судна. Время первой фиксации координат места лежит в промежутке от 30 секунд до 2-3 минут и зависит о состояния альманаха системы и данных эфемерид в памяти приёмника. В течение этого процесса заголовок экрана может показывать режим DR или EXT, если обновление координат с NT происходит от внешнего источника.
С переходом в режим непрерывного обновления места по системе GPS индикатор состояния покажет режим DGPS или GPS – зависимости от конфигурации системы и наличия дифпоправок (RTCM-104). При срыве сопровождения спутников приёмник автоматически перейдёт в один из режимов: DR или EXT.
NT GPS начинает сканирование для спутников, захват по доступным спутникам, получение навигационных данных и непосредственно расчёт позиции судна. Навигационную информацию можно вывести в цифровом виде. Существуют два навигационных экрана, NAV1 и NAV2, которые выдают курс судна при плавании по маршруту или направление на путевую точку маршрута. NAV2 отображает картушку компаса, указывающую курс на следующую путевую точку и курс относительно дна. Кроме того, в нижней части дисплея NAV2 выводится индикатор поперечного сдвига от маршрута.
Три последовательно включаемые навигационные экраны USER1, USER2, USER3 позволяют настроить их для вывода необходимой информации в виде двух или четырёх текстовых строк.
До включения NT GPS в работу необходимо с помощью кнопки SETUP сделать необходимые установки. Все исходные установки вводятся с помощью цифровой клавиатуры и/или стрелочных кнопок и сохраняются в памяти прибора.
Установочное меню NT GPS –это 4-х уровневая структура.
Первый уровень SETUR вызывается нажатием кнопки SETUP (рис. 25.25).
Вторые уровни – GPS, MISC, DR, ALARM, USER – вызываются програм-мируемыми клавишами на экране первого уровня (рис. 25.26, 25.27).
Третий уровень – DATUM, USER1, USER2, USER3 и т.д. – вызывается программируемыми клавишами на экранах второго уровня (рис. 25.28).
Четвёртый уровень вызывается программируемой клавишей на экране третьего уровня (рис. 25.24).
Экран каждого меню представляет собой набор данных, из которых можно произвести выбор или ввести его. Выборы из определённого меню представляют собой фиксированные наборы текущих или исходных данных, подсвеченных окошком. Другие входы в меню, такие как дата и время, требуют ввода числа или значения с помощью цифровой аппаратуры и/или стрелочных кнопок. Окончание выбора, ввода и перемещения на следующее поле фиксируется нажатием кнопки с двойной стрелкой ».

Каждый установочный экран включает перечень из 17 элементов навигации, которые могут быть выбраны или установлены на каждом экране пользователя USER. Обозначение указанных элементов стандартное (табл. 25.4).
Каждому экрану USER установлено фиксированное количество линий или строк (2 или 4). Выбор нужного элемента производится его выделением.
Табл. 25.4
| Date (Дата) | День, месяц, год |
| Time (Время) | Время (часы, минуты, секунды) |
| Position (Координаты места) | Широта и долгота (в проекции Меркатора) |
| COG(Курс абсолютный) | Курс относительно Земли |
Продолжение табл. 25.4
| SOG (Скорость абсолютная) | Скорость относительно Земли | ||
| XTE (Величина бокового уклонения) | Величина бокового уклонения | ||
| DTW (Дистанция до путевой точки) | Расстояние до путевой точки | ||
| DTD (Дистанция до пункта назначения) | Расстояние до конечной точки маршрута | ||
| CTW (Курс на путевую точку) | Курс, пеленг на путевую точку | ||
| TTG (Время движения) | Оставшееся время на переходе | ||
| ETA (Время прибытия) | Расчётно
|
Главная страница Случайная страница Контакты