КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Принцип работы пневматической подвески
В пневматической подвеске реализовано, как правило, три алгоритма управления:
- автоматическое поддержание определённого уровня кузова (рамы) относительно поверхности дороги или дорожного просвета (у автомобилей с независимой подвеской);
- принудительное изменение уровня кузова (рамы) относительно поверхности дороги или дорожного просвета;
- автоматическое изменение уровня кузова относительно поверхности дороги или дорожного просвета в зависимости от скорости движения автомобиля (только на легковых автомобилях).
Автоматическое поддержание определенного уровня кузова (рамы) в пневматической подвеске осуществляется независимо от степени загруженности автомобиля. Датчики уровня кузова постоянно измеряют расстояние от колес до кузова (рамы). Результаты измерений сравниваются с заданной величиной. При расхождении показаний электронный блок управления задействует необходимые исполнительные устройства: клапаны упругих элементов для подъема, выпускной клапан для опускания кузова (рамы).
Принудительное изменение уровня кузова (рамы). В работе пневматической подвески обычно предусмотрено три уровня кузова (рамы) относительно поверхности дороги поверхности: номинальный, повышенный и пониженный.
Требуемый уровень кузова (рамы) устанавливается водителем с помощью регулировочных клавиш (рисунок 1.22) или пульта дистанционного управления (на грузовых автомобилях) (рисунок 1.23), связанного с кабиной посредством кабеля. С помощью этих клавиш или пульта водитель может остановить текущий процесс регулирования и установить уровень кузова (рамы), используемый для режима движения.

А) б)
Рисунок 1.22 – Выключатель системы регулирования уровня рамы:
а – клавиша «Остановка регулирования / Включение положения движения»;
б – клавиша установки уровня рамы для движения
Функции подъёма и опускания кузова (рамы) с помощью клавиш могут быть выполнены при неподвижном автомобиле или при ограниченной скорости его движения (например, до 30 км/ч у автомобиля Mercedes-Benz Actros 2), а с помощью пульта управления – только при неподвижном автомобиле.
Регулирование рамы с помощью пульта дистанционного управления производится следующим образом. Автомобиль затормаживается стояночным тормозом при работающем двигателе. Нажатием на пульте кнопок 3 или 4 управления подъемом (опусканием) соответственно передней или задней частей рамы вместе с кнопками 8 «Поднять» или 9 «Опустить» производится подъём (опускание) рамы на требуемую высоту. Затем нажатием кнопки 10 «Стоп» и удерживанием её и нажатием кнопок 5 «Высота передней части рамы» или 6 «Высота задней части рамы» производится фиксирование положения рамы.
Рисунок 1.23 – Пульт дистанционного управления:
1 – контрольная лампа подъема (опускания) передней части рамы; 2 – контрольная лампа подъема (опускания) задней части рамы; 3 – кнопка управления подъемом (опусканием) передней части рамы; 4 – кнопка управления подъемом (опусканием) задней части рамы; 5 – кнопка «Высота передней части рамы»; 6 – кнопка «Высота задней части рамы»; 7 – кнопка «Положение движения»; 8 – кнопка «Поднять»; 9 – кнопка «Опустить»; 10 – кнопка «Стоп (поднять/опустить)»
Автоматическое изменение уровня кузова в зависимости от скорости движения автомобиля обеспечивает снижение аэродинамического сопротивления и повышение устойчивости движения автомобиля. При увеличении скорости движения программа управления подвеской последовательно устанавливает уровни кузова от повышенного к номинальному и далее, с ростом скорости, к пониженному. При снижении скорости движения система переводит кузов из пониженного на номинальный уровень.
В конструкциях пневмоподвесок полноразмерных внедорожных легковых автомобилей и кроссоверов предусмотрен дополнительный уровень кузова для посадки пассажиров и погрузки багажа, который реализуется на неподвижных автомобилях.
Простейшая схема пневмоподвески грузового автомобиля с пневмобаллонами показана на рисунке 1.24 [5], а схема трёхконтурной системы управления положением уровня рамы седельного тягача Mercedes-Benz Actros 2 (типа 6х2) – на рисунке 1.25 [6].
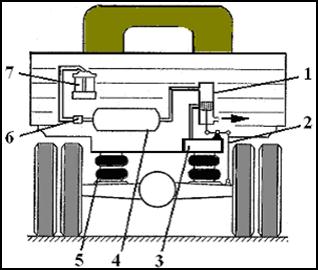
Рисунок 1.24 – Схема пневмоподвески грузового автомобиля с пневмобаллонами:
1 – регулятор постоянства положения платформы автомобиля; 2 – стойка; 3 – дополнительный резервуар сжатого воздуха; 4 – ресивер; 5 – пневмобаллон; 6 – регулятор давления; 7 – компрессор;
Пневмобаллоны 5 установлены между рамой и мостом автомобиля. Компрессор 7 нагнетает сжатый воздух в ресивер 4 через водомаслоотделительный фильтр и регулятор давления 6. Из ресивера сжатый воздух поступает в регулятор 1 постоянства положения платформы автомобиля. Пневмобаллоны 5 соединены с дополнительным резервуаром 6, в который поступает воздух при увеличении давления в пневмобаллонах при их сжатии, что делает подвеску более мягкой.
Регулятор 1 положения платформы обеспечивает при любой полезной нагрузке автомобиля одно и то же расстояние между мостом автомобиля и платформой. Корпус регулятора установлен на платформе, а золотник соединен с мостом автомобиля при помощи стойки 2 и рычага. При изменении положения (повороте) рычага золотник перемещается и открывает клапаны, соединяющие пневмобаллоны либо с магистралью пневмосистемы автомобиля, либо с атмосферой. При увеличении статической нагрузки пневмобаллоны сжимаются, опуская платформу (раму) автомобиля, и расстояние между ней и мостом уменьшается. Рычаг поворачивается и перемещает золотник регулятора 1 вниз. Вследствие этого сжатый воздух из ресивера 4 поступает в дополнительный резервуар 3 и пневмобаллоны 5 (увеличивая в них давление) до тех пор, пока платформа (рама) не вернётся в исходное положение, на которое настроен регулятор.
При уменьшении статической нагрузки золотник перемещается вверх, воздух из пневмобаллонов через регулятор выпускается в атмосферу, давление в пневмобаллонах уменьшается и платформа (рама) также возвращается в исходное положение.
Для того чтобы регулятор реагировал только на изменение нагрузки на платформе автомобиля и не срабатывал при колебаниях его платформы (рамы), обусловленных наездом колес на неровности дороги, в его конструкцию введено устройство запаздывания срабатывания (по времени до 20 с).
Таким образом, вся система регулирования работает при статическом изменении нагрузки.
В пневмосистеме имеется обратный клапан, который исключает утечку сжатого воздуха из пневмобаллонов подвески при неисправном компрессоре или при падении давления в ресивере.
В пневмоподвеске седельного тягача Mercedes-Benz Actros 2 (типа 6х2) реализовано два алгоритма регулирования уровня рамы: автоматическое поддержание установленного уровня рамы и принудительное изменение его положения спереди и сзади.
Электронный блок управления (базовый модуль) 11 управляет пневмосистемой в автоматическом режиме. Он получает электрические сигналы от входных датчиков через модули управления передней 9 и задней 5 подвесок или пульта управления 1 и преобразует их в управляющие воздействия на исполнительные устройства 10 и 12. При необходимости пневмоподвеска автомобиля приводится нажатием одной клавиши, расположенной на панели переключателей, из любого текущего положения каждого пневмоэлемента в положение для движения. При утечке воздуха из любой магистрали (контура) базовый модуль информирует об этом водителя на дисплее 2.
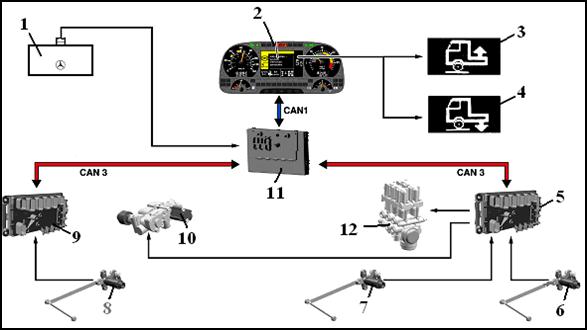
Рисунок 1.25 – Схема системы регулирования положения уровня рамы:
1 – пульт управления системой регулирования уровня рамы (см. рисунок 1.23);2 – панель приборов с дисплеем системы информации водителя; 3 и 4 – символы "Рама автомобиля выше или ниже нормального положения"; 5 – модуль управления задней подвеской (подвеской задних осей); 6 и 7 – датчики перемещения задней части рамы; 8 – датчик перемещения передней части рамы; 9 – модуль управления передней подвеской; 10 – блок электромагнитных клапанов передней оси; 11 – базовый модуль; 12 – блок электромагнитных клапанов задних осей
На автомобиле установлена трёхконтурная система управления пневмоподвеской, в которой базовый модуль обеспечивает независимое управление передними (на обе стороны одновременно) и задними (раздельно) пневмоэлементами.
При пуске двигателя базовый модуль автоматически приводит пневмоэлементы в то положение (поднимает раму на ту высоту), в котором они находились при остановке двигателя. Если этого не требуется, то функция может быть отключена.
Дата добавления: 2015-04-16; просмотров: 596; Мы поможем в написании вашей работы!; Нарушение авторских прав |