КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Сенсори положення
Резистивні сенсори
В якості резистивних сенсорів використовуються потенціометри, рухомий контакт яких з’єднано з пристроєм, положення якого необхідно визначити. Загальний вид резистивних сенсорів для вимірювання лінійних і кутових переміщень показано на рис. 4.

а) сенсор лінійного переміщення; б) сенсор кутового переміщення
Рис. 4. Конструкція резистивних сенсорів переміщень
В залежності від положення рухомого контакту опір сенсора лінійного переміщення рівний:
 , (4)
, (4)
кутового переміщення:
 . (5)
. (5)
Основним недоліком рухомого сенсора є наявність рухомого контакту, який швидко зношується. Цей недолік відсутній у магнітних сенсорах.
Диференційні трансформатори
Диференційний трансформатор складається з первинної S1 і двох вторинних S21 і S22 обмоток, магнітний зв’язок між якими реалізується за допомогою рухомого осердя. Диференційні трансформатори, в залежності від типу вимірюваного переміщення, мають різну конструкцію, що показана на рис. 5.
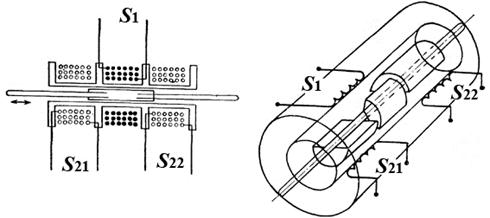
а) диф. трансформатор для вимірювання б) диф. трансформатор для вимірювання
лінійних переміщень кутових переміщень
Рис. 5. Конструкція диференційного трансформатора
В диференційному трансформаторі для вимірювання лінійних переміщень первинна обмотка розміщена між вторинними обмотками. Переміщення рухомого осердя змінює коефіцієнт магнітного зв’язку первинної обмотки з кожною з вторинних обмоток. У схемі вимірювання кутових переміщень осердя трансформатора складається з трьох частин, кожна з яких зв’язана з відповідною обмоткою. Осердя первинної обмотки S1 кріпиться на валу двигуна, кутове переміщення якого вимірюється. Осердя вторинних обмоток нерухомі і зміщені одне відносно одного на 180 °. При обертанні валу двигуна, разом з ним рухається осердя первинної обмотки, в результаті чого змінюється коефіцієнт магнітного зв’язку з кожною з вторинних обмоток. В обох схемах вторинні обмотки з’єднані за диференційною схемою, тому вихідна напруга на виході трансформатора рівна різниці напруг на вторинних обмотках. Еквівалентна схема включення трансформатора для вимірювання лінійних переміщень показана на рис. 6.

Рис. 6.Електрична схема підключення вторинних обмоток
диференційного трансформатора
При високоомному навантаженні RH напруга на виході сенсора um пропорційна різниці коефіцієнтів магнітного зв’язку вторинних обмоток М/ і М//:
 . (6)
. (6)
Оскільки різниця коефіцієнтів магнітного зв’язку обмоток пропорційна зміщенню осердя відносно центру  , вихідна напруга сенсора також пропорційна зміщенню осердя:
, вихідна напруга сенсора також пропорційна зміщенню осердя:
 . (7)
. (7)
Параметри сенсора на основі диференційного трансформатора:
- діапазон лінійних (кутових) переміщень – 1..500 мм (-45° - +45);
- чутливість: 1-500 мВ на 1 В і на 1 мм (1-10 мВ на 1 В 1°);
- нелінійність 0.05 – 1 %.
Мікросини
Мікросин складається з ротора і статора з чотирма полюсами. На кожному полюсі розміщені дві обмотки – первинна і вторинна. Ротор з’єднано з валом двигуна, кутове переміщення якого вимірюється, рис. 7.

Рис. 7. Конструкція мікроcина
Первинні обмотки мікросина з’єднані послідовно і живляться синусоїдальною напругою. Потік індукції Ф2і і ЕРС е2і і-ої вторинної обмотки розраховуються за формулами:
 ,
,  . (8)
. (8)
Вторинні обмотки також з’єднані послідовно і включені диференційно з первинними, так, щоб напруга 1 і 3 вторинних обмоток мала протилежну полярність з 2 і 4 вторинними обмотками. Тому вихідна напруга мікросина um рівна:
 . (9)
. (9)
Кутове положення ротора визначає магнітний опір магнітних контурів і, внаслідок цього, величину магнітного потоку в обмотках. Коли положення ротора симетричне відносно двох пар полюсів, потоки у всіх вторинних обмотках рівні між собою і дорівнюють Ф0, а вихідна напруга дорівнює нулю. Тому таке положення ротора – це нуль сенсора. При відхиленні ротора від цього значення величина потоку в кожній обмотці змінюється на величину ΔФі. Ця величина однакова для обмоток 1 і 3: ΔФ1 = ΔФ3 = ΔФ. І для обмоток 2 і 4: ΔФ2 = ΔФ4 = ΔФ/. Результуюча напруга сенсора рівна:
 . (10)
. (10)
Зміна потоків ΔФ і ΔФ/ мають різний знак. Для малих кутів обертання Δα зміна потоку рівна:
 (11)
(11)
Диференційна схема включення обмоток компенсує нелінійність зміни магнітного потоку:
 . (12)
. (12)
Технічні показники сенсора:
- діапазон вимірювання: ± 10°;
- чутливість: 100 мВ на 1 В і 1°;
- нелінійність 0.5-1%.
Сельсини
Сельсин складається з передавача і приймача, кожний з яких складається з однофазного ротора і трифазного статора, обмотки якого розміщуються під кутом 120° одна відносно одної. Статорні обмотки приймача і передавача попарно з’єднані між собою, рис. 8.
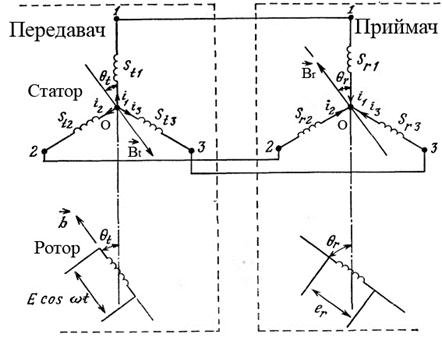
Рис. 8. Схема сельсина
Живлення ротора передавача здійснюється синусоїдальною напругою Еcos(ωt). Магнітне поле з індукцією В, створене цією напругою, індукує в статорних обмотках St1, St2, St3 ЕРС е1, е2, е3. Якщо кут між осями обмоток статора і ротора передавача рівний θt, ЕРС статорних обмоток рівні:
 (13)
(13)
де k, Ψ – залежать від геометричних і електричних характеристик обмоток. Індуковані струми статорних обмоток передавача і1, і2, і3 створюють магнітний потік з індукцією Вt, напрям якого протилежний полю ротора. Ці струми, внаслідок електричного зв’язку обмоток статора приймача і передавача, протікають по статорним обмоткам приймача, але мають протилежний напрямок відносно точки з’єднання обмоток статора О. Струми обмоток статора приймача створюють магнітне поле з індукцією Вr, яке має той же напрямок, що і індукція ротора передавача. Якщо кут між обмотками ротора і статора приймача θr, потік ротора приймача пропорційний cos(θt - θr), ЕРС на обмотці має амплітуду, пропорційну косинусу різниці кутів повороту роторів передавача і приймача:
 (14)
(14)
де k/ - залежить від конструкції сельсина і частоти ω.
Якщо на ротор приймача подати змінну напругу, яка подається на ротор передавача, ротор приймача повертатиметься на той же кут відносно осі статора, що і ротор передавача. Така схема називається слідкуючою.
Технічні показники сенсора:
- діапазон вимірювання: 0..360°;
- чутливість: 10-100 мВ на 1 В і 1°;
- точність: 5/-30/.
Дата добавления: 2014-12-03; просмотров: 437; Мы поможем в написании вашей работы!; Нарушение авторских прав |