КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Электрические машины синхронной связи
В современной технике часто возникает необходимость в синхронизации вращения или поворота осей механизмов. Эта задача успешно решается с помощью системы синхронной связи.
Синхронной связьюназывают электрическую связь, которая обеспечивает одновременное вращение или одновременный поворот двух (или более) находящихся на расстоянии друг от друга и механически не связанных валов. Распространены два вида систем синхронной связи: система «электрического вала» (синхронного вращения) и система «передачи угла» (синхронного поворота).
Системы электрического вала применяют для синхронного (одновременного) вращения нескольких механизмов, имеющих значительные нагрузочные моменты на валу. Для привода таких механизмов применяют обычные асинхронные двигатели с фазным ротором. При этом обмотки роторов электрически соединяй и друг с другом, а обмотки статоров включают в общую сеть трех фазного тока.
Системы передачи угла (синхронного поворота) применяют для дистанционного управления или контроля положения в пространстве каких-либо устройств. Обычно такая система выполняется на небольших асинхронных машинах (однофазных или трехфазных), называемых сельсинами.
Наибольшее применение получили однофазные сельсины. Такой сельсин имеет однофазную обмотку возбуждения и трехфазную обмотку синхронизации, соединенную звездой. Одна из обмоток располагается на роторе, а другая — на статоре.
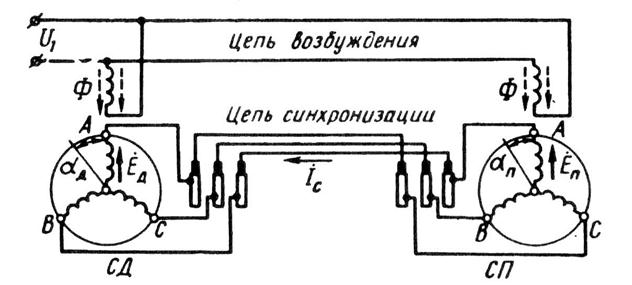
Рис. 17.4. Схема синхронной передачи
Простейшая синхронная передача, называемая индикаторной, содержит два сельсина: сельсин-датчик (СД) и сельсин-приемник (СП) (рис. 17.4). При включении обмоток возбуждения в сеть на напряжение U1 в каждом из сельсинов создается магнитный поток возбуждения Ф. В обмотке синхронизации СД этот поток наводит ЭДС Ед, а в обмотке синхронизации СП - ЭДС Еп. Эти ЭДС направлены встречно. Если роторы СД и СП занимают одинаковые положения относительно своих статоров, то Ед = Еп и система находится в равновесии. Если же ротор СД повернуть на некоторый угол αд, то ЭДС в обмотке синхронизации СД изменится, равенство ЭДС нарушится ( Ед ≠ Еп ) и в цепи синхронизации появится результирующая ЭДС
Δ  = Ед +
= Ед +  (17.2)
(17.2)
которая создаст ток синхронизации
Ic = ΔE/ (Zд + Zп + Zл) (17.3)
где Zд , Zп и Zл — сопротивления обмоток синхронизации СД и СП и сопротивление линейных проводов, Ом.
Ток синхронизации датчика взаимодействует с потоком возбуждения и создает на роторе СД электромагнитный момент, направленный встречно повороту ротора датчика, т. е. момент, противодействующий механизму, поворачивающему ротор СД на заданный угол αд.
Ток синхронизации СП также взаимодействует с магнитным потоком возбуждения и создает электромагнитный момент, направленный в сторону поворота ротора СД. Под действием этого момента, называемого синхронизирующим, ротор приемника совершает поворот на угол αп ≈ αд . После этого ротор СП займет такое же положение относительно статора, что и ротор СД, и в системе восстановится равновесие, так как ЭДС Еп и Ед станут одинаковыми. Если ротор СД вновь повернуть на некоторый угол, то этот же угол поворота будет воспроизведен приемником. При вращении ротора датчика ротор приемника также будет вращаться с такой же частотой. Однако угол поворота, установленный СД, воспроизводится ротором СП с некоторой ошибкой — рассогласованием. Для поворота ротора приемника необходимо, чтобы синхронизирующий момент, действующий на этот ротор, преодолел противодействующий момент, обусловленный силами трения в подшипниках и на контактных кольцах, а иногда еще и полезной нагрузкой на валу приемника. Ошибка в воспроизведении угла поворота оценивается углом рассогласования
Θ = αд - αп (17.4)
Ротор СП синхронно следует за ротором СД, но угол рассогласования между роторами сельсинов всегда имеется и тем больше, чем больше противодействующий момент на валу СП. Угол рассогласования обычно не превышает 2,5°, а у сельсинов высокой точности он не более 0,75°.
Значение синхронизирующего момента на роторе приемника
Мс = Мс max sin Θ (17.5)
где Мс mах — максимальное значение синхронизирующего момента, соответствующее углу рассогласования 90°.
По конструкции сельсины разделяют на контактные, у которых обмотка на роторе соединена с внешней цепью через контактные кольца и щетки, и бесконтактные, не имеющие на роторе oбмоток.
Контактные сельсины в принципе не отличаются от асинхронных двигателей с фазным ротором. На рис. 17.5 показано ycтройство контактного сельсина. Статор 7 и ротор 2 этого сельсина неявнополюсные, и поэтому обе обмотки сельсина распределенные. Наличие на роторе двух контактных колец 3 указывает пи расположение на роторе обмотки возбуждения.
В некоторых конструкциях статор или ротор делают с явно выраженными полюсами, что способствует повышению синхронизирующего момента. Наличие контактных колец — основной недостаток контактных сельсинов, так как это ведет к неустойчивости параметров сельсина и снижению его надежности.
Бесконтактные сельсины получили широкое применение в системах синхронного поворота благодаря своей высокой надежности. Эти сельсины не имеют скользящих контактов, так как их обе обмотки расположены на статоре (рис. 17.6). Ротор бесконтактного сельсина представляет собой цилиндр из ферромагнитного материала, разделенный немагнитной прослойкой на две магнитно изолированные части, образующие полюсы. Алюминий, который заливают в ротор, является магнитной изоляцией и одновременно материалом, скрепляющим части ротора. С торцовых сторон сельсина расположены тороидальные сердечники 1, выполненные из тонколистовой электротехнической стали.
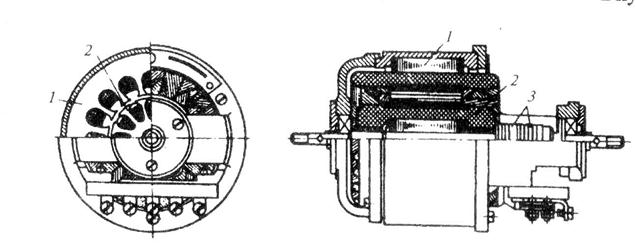
Рис. 17.5. Устройство контактного сельсина
Внутренняя поверхность этих сердечников расположена над ротором, а к их внешней поверхности примыкают стержни внешнего магнитопровода 4. Однофазную обмотку возбуждения сельсина выполняют в виде двух дисковых катушек 2, расположенных с противоположных сторон статора по оси сельсина между обмоткой синхронизации 3 и тороидальными сердечниками.

Рис. 17.6 Конструктивная схема бесконтактного сельсина
В процессе работы сельсина пульсирующий магнитный поток возбуждения замыкается в магнитной системе сельсина, сцепляясь с трехфазной обмоткой синхронизации на статоре. Путь замыкания потока показан на рисунке пунктирной линией. Как видно из этого рисунка, магнитный поток, замыкаясь в магнитопроводе, проходит через воздушный зазор четыре раза. По этой причине для создания требуемого магнитного потока в бесконтактном сельсине необходима значительная МДС. Это является причиной повышенных габаритов бесконтактного сельсина по сравнению с контактным.
Дата добавления: 2015-01-18; просмотров: 358; Мы поможем в написании вашей работы!; Нарушение авторских прав |