КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Асинхронные исполнительные двигатели
В системах управления, регулирования и контроля широко применяются управляемые электродвигатели небольшой мощности. С помощью этих двигателей осуществляется

Рис. 17.7. Схема включения
асинхронного исполнительного двигателя
преобразование электрического сигнала в механическое перемещение — вращение вала. Такие электродвигатели называют исполнительными (ИД).
Характер требований, предъявляемых к исполнительным двигателям, определяется спецификой их работы: частые пуски, реверсы, постоянно изменяющаяся частота вращения. Основные требования - отсутствие самохода, т. е. самоторможение при снятии сигнала управления; широкий диапазон регулирования частоты вращения; линейность характеристик; большой пусковой момент; малая мощность управления; быстродействие (малоинерционность).
На статоре асинхронного исполнительного двигателя расположена двухфазная обмотка (см. § 16.2). Одна из фазных обмоток — обмотка возбуждения (ОВ) - постоянно включена в сеть с напряжением U1, а на другую - обмотку управления (ОУ) — напряжение (сигнал управления) Uc подается лишь при необходимости включения двигателя (рис. 17.7).
Для работы двухфазного ИД необходимо вращающееся магнитное поле, непременным условием возникновения которого является наличие пространственного и временного сдвигов между МДС фазных обмоток статора. Пространственный сдвиг указанных МДС обеспечивается конструкцией обмотки статора, при ко торой оси фазных обмоток сдвинуты в пространстве относительно друг друга обычно на угол 90 эл. град. Временной (фазный) сдвиг МДС создается либо питанием обмотки статора двухфазной сие темой напряжений (см. § 16.2), либо включением в цепь ОУ фазовращателя — устройства, позволяющего получать различные фазовые сдвиги напряжения на его выходе относительно напряжения на входе, т. е. относительно напряжения на обмотке возбуждения, либо включением последовательно в цепь ОВ емкости ( (рис. 17.7).
Последний способ включения ИД применяют наиболее часто Обычно значение емкости С выбирают из условия получения кругового поля при пуске двигателя. По окончании пускового периода двигатель работает с эллиптическим вращающимся полем.
В процессе управления двигателем изменяют сигнал Uс на ОУ при этом меняется как значение (амплитуда) МДС этой обмотки, так и ее фазовый сдвиг относительно МДС обмотки возбуждения. Поэтому рассматриваемый способ управления ИД называют амплитудно-фазовым.
Одно из основных требований к ИД — отсутствие самохода. Известно, что обычные асинхронные двигатели имеют небольшое активное сопротивление обмотки ротора и работают с малым критическим скольжением (см. § 13.3). Такие двигатели непригодны в качестве исполнительных, так как они обладают самоходом, т. е. при снятии сигнала управления двигатель будет продолжать работать как однофазный. Это иллюстрирует рис. 17.8, а, на котором точка А определяет режим работы двигателя с нагрузочным моментом Миом при наличии сигнала управления. При снятии сигнала управления поле статора становится пульсирующим (обмотка возбужения постоянно включена в сеть) и режим

Рис. 17.8. Устранение самохода в асинхронном
исполнительном двигателе
работы двигателя "определяется точкой В на характеристике однофазного двигателя. При этом электромагнитный момент двигателя останется положительным. Если же увеличить активное сопротивление ротора, то форма кривых прямого Мпр, обратного Мобр и результирующего М = Мпр + Мобр моментов изменится (рис. 17.8, б): максимумы моментов Мпр и Мобр сместятся в область больших скольжений (sкр > 1 ). Теперь после прекращения сигнала управления, т. е. при переходе двигателя в однофазный режим, электромагнитный момент становится отрицательным Мт (точка В) и оказывает на ротор тормозящее действие, не допуская самохода.
К исполнительным двигателям предъявляется также требования малоинерционности (быстродействия), т. е. при подаче сигнала управления ротор двигателя должен очень быстро достигать установившейся частоты вращения. Выполнению этого требования
способствуют увеличение пускового момента, уменьшение синхронной частоты вращения поля статора и снижение момента инерции ротора. При повышенных частотах питающего напряжения (больших синхронных частотах вращения) ИД с ротором обычной (короткозамкнутой) конструкции из-за значительного момента инерции последнего не обладают требуемым быстродействием. В этом случае применяют асинхронные
исполнительные двигатели с полым немагнитным ротором (рис. 17.9). Полый немагнитный ротор представляет собой тонкостенный алюминиевый стакан 2, что, с одной стороны, обеспечивает ротору повышенное активное сопротивление, а с другой — весьма небольшой момент инерции.
Двигатель имеет два статора: внешний 1 с обмоткой и внутренний 3 без обмотки, входящий внутрь полого стакана ротора Внутренний статор необходим для уменьшения магнитного сопро тивления основному магнитному потоку.
По сравнению с исполни тельными двигателями обычно и конструкции двигатели с полым немагнитным ротором имею! повышенные габариты и невысокий КПД. Это объясняется повышенным зазором между наружным и внутренним статорами, который складывает ся из толщины стенки стакана ротора и двух воздушных зазо ров. Как известно, увеличение воздушного зазора способствуем росту намагничивающего тока двигателя и снижению его КПД.
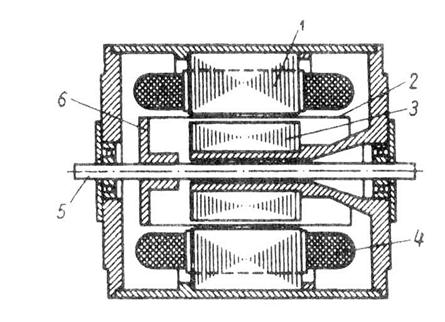
Рис. 17.9. Асинхронный двигатель
с полым немагнитным ротором:
1 — внешний статор; 2 — стакан ротора; 3 — внутренний статор; 4— обмотка статора; 5 — вал; 6 — втулка крепления стакана ротора
Дата добавления: 2015-01-18; просмотров: 273; Мы поможем в написании вашей работы!; Нарушение авторских прав |