КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ГЛАВА 8 ГЕНЕРАТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ
8.1. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Пьезоэлектрические преобразователи выполняются из материалов, в которых возможен пьезоэлектрический эффект, который может быть прямым и обратным.
Прямой пьезоэффект заключается в возникновении электрических зарядов на гранях пьезоэлектрика при воздействии на него механической силы, вызывающей напряжение в материале. При устранении силы заряды исчезают.
Обратный пьезоэффект проявляется в том, что пьезоэлектрик, помещенный в электрическое поле, изменяет свои геометрические размеры. Чаще всего в качестве пьезоэлектрика применяют кварц, на примере которого и рассмотрим принцип действия пьезоэлектрического преобразователя.
В кристаллах кварца принято различать главные оси: электрическую X, механическую У и оптическую Z(рис. 8.1). Параллелепипед, вырезанный из кристалла кварца так, чтобы его грани были параллельны главным осям, обладает следующими свойствами:
• продольным пьезоэффектом при воздействии силы Fx, направленной вдоль электрической оси X, на гранях be, перпендикулярных этой оси, появляются электрические заряды;
• поперечным пьезоэффектом при воздействии силы Fy, направленной вдоль механической оси У, заряды появляются также на гранях be,
• отсутствием зарядов при приложении механической силы вдоль оптической оси Z.
Величина зарядов, возникающих на гранях кристалла be под действием силы Fx, не зависит от геометрических размеров кристалла и равна
q = d,Fx, (8.1)
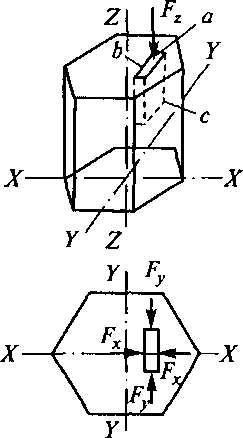 Рис. 8.1. Кристалл кварца
Рис. 8.1. Кристалл кварца
|
где — постоянный коэффициент, называемый пьезоэлектрической постоянной.
Величина зарядов, возникающих под действием силы Fy, зависит от геометрических размеров кристалла и имеет противоположный знак:
g = -dlFyb/a, (8.2)
где b и а — длина и ширина граней.
Из (8.2) видно, что в случае необходимости можно повысить чувствительность пьезоэлектрика, увеличив отношение Ь/а.
В случае растягивающих усилий вдоль осей Хи F возникающие заряды будут иметь знаки, противоположные случаю сжимающих усилий. В тех случаях, когда параллелепипед вырезан не вдоль осей, а под углом к ним, возникающие заряды будут меньше. Учет углов рассматривается в специальной литературе.
В качестве пьезоэлектриков наиболее часто применяют сегне- тову соль, кварц, титанат бария.
Сегнетова соль обладает наибольшей пьезоэлектрической чувствительностью (с?, = 3 • Ю"10 к/Н). Однако ряд недостатков, а именно сильная гигроскопичность, малая механическая прочность, низкое удельное электрическое сопротивление делают возможным применение ее только в лабораторных условиях для измерения быстропеременных сил и давлений.
Керамика титаната бария обладает высокой механической прочностью, и ее свойства не зависят от влажности. Пьезоэлектрическая постоянная титаната бария dx = 107- 10~12 к/Н. Недостатками пьезоэлементов из керамики титаната бария являются сильная зависимость пьезоэлектрической постоянной от температуры (dx мало изменяется лишь в пределах температур + 15... + 100°С), а также изменение свойств керамики во времени (старение), которое достигает 20 % в течение двух лет.
В последнее время получены новые пьезокерамические материалы, например пьезокерамика на основе свинца и бария, которые могут работать при температурах до 200 °С.
Наибольшее применение для измерительных целей получил кварц, так как он обладает высокой механической прочностью, хорошими изоляционными качествами, независимостью пьезоэлектрической постоянной от температуры в широком диапазоне (до 200 °С коэффициент d\ совсем не зависит от температуры, а в пределах 200... 500 °С зависит незначительно). Кроме того, кварц негигроскопичен.
Недостатком кварца является значительная зависимость удельного сопротивления кварца от температуры. Так, при изменении температуры в пределах +20...+300°С удельное сопротивление кварца вдоль оптической оси изменяется в пределах 1 • 1012... 6- 105 Ом м2/м.
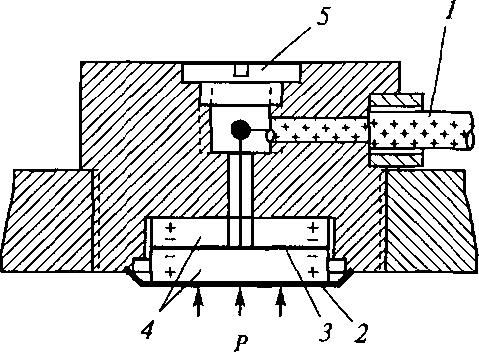
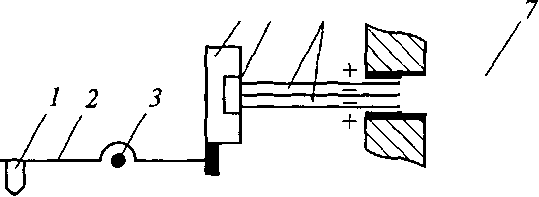
Устройство пьезоэлектрического преобразователя схематично изображено на рис. 8.2. Здесь измеряемое давление Р действует на мембрану 2, которая является одновременно дном корпуса пре-
Рис. 8.2. Устройство пьезоэлектрического преобразователя:
| а б |
1 — кабель; 2 — мембрана; 3 — латунная фольга; 4 — кварцевые пластины; 5 — пробка
образователя. Кварцевые пластины 4 соединены параллельно. Наружные обкладки кварцевых пластин заземляются, а средняя обкладка (латунная фольга 3) изолируется относительно корпуса самим кварцем, удельное сопротивление которого велико (при 20 "С, р = МО12 Ом-м2/м).
Сигнал с кварцевых пластин снимается при помощи латунной фольги J и по кабелю 1 подается на вход измерительного усилителя. Для удобства соединения вывода от фольги с внутренней жилой экранированного кабеля в корпусе преобразователя предусмотрено отверстие, закрываемое пробкой 5.
Заряд, возникающий на гранях пьезоэлемента под действием силы Р, сохраняется лишь при отсутствии утечки, т.е. при бесконечно большом входном сопротивлении измерительной цепи. Практически это условие невыполнимо, а потому пьезоэлектрические преобразователи для измерения статических сил не применяются. При действии динамических, т. е. переменных во времени, сил количество электричества на гранях все время восполняется и становится возможным потребление тока измерительной цепью.
|
Тем не менее, требование к величине входного сопротивления измерительной цепи остается жестким, так как выходная мощность пьезоэлектрических преобразователей очень мала и на выход преобразователя должен быть включен усилитель с воз-
| II 0 | 1,^0 | |||||
| II 2> [ | 1*0 _ | ст г | ] \,п с ---- о | II 2> = | С Г | — |
| Рис. 8.3. Эквивалентные схемы пьезоэлектрического преобразователя:а — полная; б — упрощенная |
можно большим входным сопротивлением (Ю10... 1013 Ом). Этому требованию обычно удовлетворяют, например, электрометрические лампы.
Полная эквивалентная схема пьезоэлектрического преобразователя представлена на рис. 8.3, а.
Здесь С0 — собственная емкость пьезоэлектрика; Свх — емкость кабеля и входная емкость измерительной цепи; R0 — сопротивление преобразователя с учетом сопротивления изоляции линии относительно земли; RBX — входное сопротивление измерительной цепи.
На рис. 8.3, ^приведена упрощенная эквивалентная схема, где сопротивление
|
Если вдоль электрической оси пьезоэлектрика приложена сила, изменяющаяся по закону синуса, т.е. Fx = Fxmsinco/, то направление на выходе преобразователя тоже будет изменяться синусоидально.
| (8.3) |
Если бы входное сопротивление измерительной цепи было бесконечным, то напряжение преобразователя определялось бы только генерируемым количеством электричества и собственной емкостью
U =д/С0 = dxFxmsincof/Co
или в комплексной форме
U = d\F/С0.
С учетом же конечного входного сопротивления измерительной цепи (обычно Rax = 10s... 109 Ом) напряжение, поступающее на вход преобразователя, определяется по формуле
| (8.4) |
| ПОЛИ 1 |
= d\FZm /C0Z,
где
| (8.5) |
| вх ~ |
|
7®СВХ
— входное сопротивление измерительной цепи;
полное сопротивление эквивалентной цепи.
Подставляя (8.5) и (8.6) в формулу (8.4), найдем
——Л
тт _d\F у со Спх___________ 1_________
вх ~~ Г 1 1
—+ —
усоСвх 1 | усоСвх
ycoCto [2] , R У'ш Свх
= d F jwR (8 74
' 1 + усоЛ (Свх + С0)
Из этого выражения можно найти модуль входного напряжения
К1= , ^ 2, (8.8)
а также сдвиг фаз между входным напряжением и током
х 1
а = arctg - = arctg ——----- ——. (8.9)
г со (СВХ+С0)Л
Величина С0 обычно составляет десятки пикофарад. Величина сопротивления пластин пьезоэлектрика, например из кварца, составляет 1015... 1016 Ом. Поверхностное сопротивление кварца лежит в пределах 109... Ю10 Ом. Необходимо следить за тем, чтобы поверхность пьезоэлектрика не загрязнялась, в противном случае сопротивление резко упадет.
Основными составляющими погрешностями пьезоэлектрических преобразователей являются:
• погрешность от изменения параметров измерительной цепи (например, емкости С^);
• погрешность от изменения окружающей температуры, связанная с изменением пьезоэлектрической постоянной;
• погрешность из-за неправильной установки пластин, которая может быть учтена при градуировке;
• погрешность, вызванная чувствительностью к силам, действующим вдоль механической оси;
• частотная погрешность.
Как видно из (8.8), входное напряжение пьезопреобразователя не будет зависеть от частоты изменения приложенного усилия лишь в том случае, когда
со2Д2(Свх + С0)2 » 1.
Тогда U0bx = d,F'"
(свх + С0 J
| ъ = |
Относительная частотная погрешность может быть выражена следующим образом:
dxFmwR d{ Fm
-U0BX _yll + wiR2(Cm+C0f (Свх+С0)
^овх dxFm
(Свх + С0) wR{CBX+C0)
-1. (8.10)
yjl + w*R2 (CBX+C0f
Следовательно, нижняя граница частотного диапазона определяется величиной постоянной времени цепи т = R(CBX + С0), которую можно увеличить путем повышения входного сопротивления RBX. Увеличение входной емкости Свх ведет к потере чувствительности преобразователя. Действительно, если соЛ(Свх + С0) » 1, то
d\Fm
(Свх +С0) и чувствительность преобразователя
^пр =UBX/Fm =rf,/(CBX +С0). (8.11)
Верхняя граница допустимого частотного диапазона определяется частотой собственных колебаний преобразователя. Пьезоэлектрические преобразователи могут быть выполнены с частотой собственных колебаний до 100 кГц, что позволяет использовать их для измерения механических величин, изменяющихся с частотой до 7... 10 кГц.
Пьезоэлектрические преобразователи применяют для измерения переменных сил, давлений, вибрационных ускорений.
Примером применения пьезоэлементов служат профилометры — приборы для оценки шероховатости поверхности обрабатываемой детали (рис. 8.4).
Ощупывающая алмазная игла /, имеющая радиус закругления 1,5 мкм, укреплена на конце подвижного коромысла 2, которое может вращаться вокруг оси 3. На другом конце коромысла имеется «смычок» 4, связывающий при помощи эластичной ленточки 5 подвижное коромысло со свободным концом пластинок 6 из сег- нетовой соли. Другой конец пластинок закреплен неподвижно. Пластинки соединены параллельно так, что на наружных гранях пластинок появляется заряд одного знака.
|
| 4 5 6 |
| з—отта |
| Рис. 8.4. Устройство профилометра: |
| / — алмазная игла; 2 — коромысло; 3 — ось; 4 — «смычок»; 5 — эластичная ленточка; 6— пластинки; 7— экранированный кабель |
При перемещении алмазной иглы 1 в вертикальном направлении (из-за шероховатостей исследуемой поверхности) свободный конец пластинок б также перемещается, пластинки изгибаются и на поверхностях пластин появляется заряд. Гибкий экранированный кабель 7 соединяет грани пьезопреобразователя с измерительной цепью.
8.2. ГАЛЬВАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Гальванические преобразователи применяют в основном для анализа состава водных растворов. Принцип действия их основан на зависимости ЭДС гальванической цепи от концентрации ионов в электролите. Для анализа водных растворов используют зависимость активности водородных ионов от концентрации раствора.
Вода, обладающая наибольшей по сравнению с другими веществами диэлектрической проницаемостью (ен,0 =81), хорошо способствует диссоциации растворяемого вещества на ионы и сама несколько диссоциирует по схеме
Н20 ^ Н+ + ОН",
чем обусловлена вполне определенная, хотя и малая электропроводность воды.
Так как распадение воды на ионы крайне незначительно, то концентрацию воды можно считать постоянной и равной единице. Произведение концентраций I Hi • I OHi = Kih0 — величина постоянная и равная 10'14 при t - + 22 °С, как установлено многочисленными опытами.
Так как молекулы воды при ионизации образуют ионы водорода и гидроксила в равном количестве, то
|н+| = JoH'j = VTo7^ = кг7.
Растворы, в которых число ионов I Н+| и I ОН | одинаково, называются нейтральными.
Если в воде растворить кислоту, то концентрация ионов I Н+[ в растворе станет больше, если же растворить щелочь, то наоборот, больше станет ионов | OHi . Таким образом, у кислых растворов I Н+| > Ю-7, а у щелочных | Н+| < Ю-7, и в зависимости от этого можно охарактеризовать растворы как кислые, щелочные или нейтральные.
На практике концентрацию водородных ионов численно характеризуют отрицательным логарифмом концентрации — водородным показателем рН = -lgl Hi . Например, если I Н+| = Ю-3, то рН = 3.
Приборы для измерения показателя рН называют рН-метрами. Наиболее точным и универсальным методом измерения рН является электрометрический метод, суть которого заключается в следующем.
Если в раствор какого-либо вещества внести электрод из этого же вещества, то на границе «электрод — раствор» возникает пограничный электрический потенциал (так называемый электродный потенциал), величина которого зависит от степени концентрации раствора.
Гальванические преобразователи, являющиеся датчиками рН-метров, в качестве входной величины имеют значение концентрации водородных ионов, выраженное в единицах рН, а в качестве выходной величины — гальваническое напряжение, равное разности электродных потенциалов. Так как практически потенциал одного электрода измерить невозможно, то гальванический преобразователь всегда состоит из двух полуэлементов: измерительного электрода, помещенного в раствор, и образцового полуэлемента.
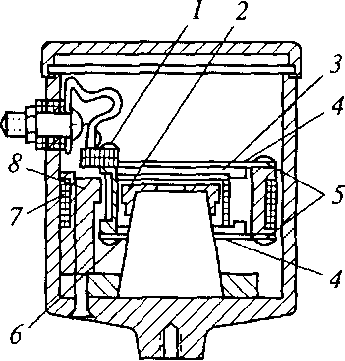
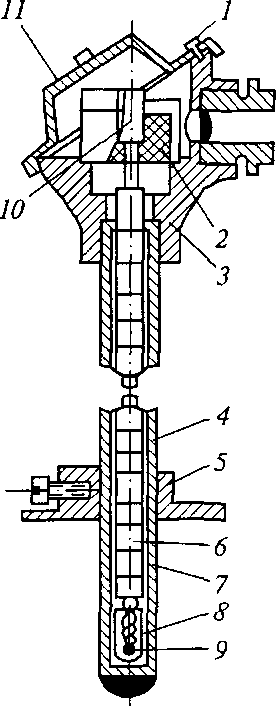
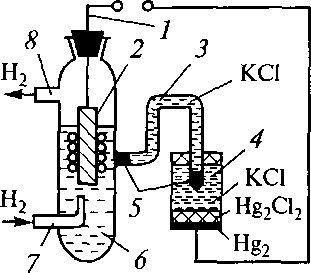 Рис. 8.5. Устройство рН-метра: 1 — вывод; 2 — пластинка; 3 - электролитический ключ; 4 — полуэлемент; 5 — полупроницаемые пробки; 6 — колба; 7 — трубка; 8 — отверстие
Рис. 8.5. Устройство рН-метра: 1 — вывод; 2 — пластинка; 3 - электролитический ключ; 4 — полуэлемент; 5 — полупроницаемые пробки; 6 — колба; 7 — трубка; 8 — отверстие
|
Принципиальное устройство рН-метра показано на рис. 8.5. В колбу 6 налит испытуемый раствор. Так как необходимо измерять концентрацию ионов водорода, то, согласно принципу действия гальванических преобразователей, электрод должен быть выполнен из водорода. Но, поскольку водород является газом и выполнить электрод из него невозможно, пользуются способностью водорода адсорбироваться на поверхности платины. Измерительный (водородный) электрод представляет собой пластинку 2 из черненой платины, которая обтекается непрерывно поступающим через трубку 7водородом. Водород выходит через отверстие 8. От платиновой пластинки отходит вывод 1 в измерительную цепь.
Для получения второго потенциала колба с испытуемым раствором соединяется через электролитический ключ 3 со вторым образцовым полуэлементом 4. Электролитический ключ представляет собой трубку, закрытую полупроницаемыми пробками 5, и заполненную насыщенным раствором КС1; такое соединение сильно снижает диффузионный потенциал, вносящий погрешность в измерения.
В качестве образцового полуэлемента чаще всего используют каломельный полуэлемент, металлом которого является ртуть. Ионы ртути получают из раствора каломели Hg2Cl2. Концентрация электролита КС1 определяет потенциал ртути, равный 0,24 В (при насыщенном растворе КС1).
Кроме каломельного, используют также хлорсеребряный, бром- серебряный и другие образцовые элементы.
Применение водородного электрода в производстве обычно неудобно, так как связано с подачей газообразного водорода, поэтому на практике большое распространение получил стеклянный электрод (рис. 8.6).
Он представляет собой шаровую тонкостенную колбочку 1, выдуваемую на конце трубки из специальных электропроводных сортов стекла. Толщина стенки колбочки равна 0,05...0,1 мм.
Колбочка заполняется контрольным (нормальным) раствором какой-либо соли или кислоты с известным рН и погружается в исследуемый раствор. На границе стекло—раствор появляется определенный потенциал, зависящий от концентрации водородных ионов раствора, в который погружен стеклянный электрод. При работе используются обе поверхности стеклянного электрода, так как снять потенциал с одной только поверхности невозможно (так как нельзя включить поверхность стекла в электрическую цепь).
Внутрь колбочки 1, заполненной образцовым раствором, вставляется вспомогательный электрод 2 (обычно хлорсеребряный), с которого снимается потенциал стеклянного электрода.
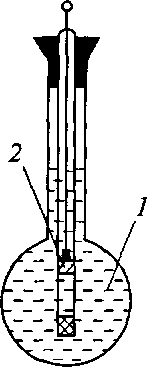 Рис. 8.6. Стеклянный электрод:
/ — колбочка; 2 — электрод
Рис. 8.6. Стеклянный электрод:
/ — колбочка; 2 — электрод
|
Если в испытуемый раствор поместить еще и каломельный полуэлемент, ЭДС на выводах преобразователя будет являться алгебраической суммой ЭДС хлорсеребряного полуэлемента, внутренней поверхности и наружной поверхности стеклянного электрода и потенциала каломельного полуэлемента. Так как при изменении рН исследуемого раствора будет изменяться только потенциал наружной поверхности электрода, а остальные составляющие ЭДС останутся неизменными, то, измеряя ЭДС на выводах преобразователя, можно судить о концентрации рН исследуемого раствора.
Потенциал стеклянного электрода изменяется примерно от 0,3 В (при рН = 0) до 0,9 В (при рН * 10).
Наиболее обоснованное объяснение действия стеклянного электрода состоит в следующем. При помещении стеклянного электрода в раствор ионы натрия из стекла переходят в раствор, а их места замещают ионы водорода из раствора. В результате этого поверхностный слой стекла оказывается насыщенным водородными ионами, и стеклянный электрод приобретает свойства водородного электрода. Существуют также хингидронный, сурьмяный электроды. Градуировка рН-метров производится по образцовым буферным растворам, обладающим высокой стабильностью значений рН (±0,01 рН в диапазоне температур 0...95°С).
Погрешности рН-метров. Основным требованием, предъявляемым к методу измерения ЭДС рН-метрами, является возможно меньший ток, протекающий через преобразователь, так как он, во-первых, создает падение напряжения на его внутреннем сопротивлении, вследствие чего результат занижается; во-вторых, вызывает явление поляризации, что также влечет за собой отрицательную погрешность. Падение напряжения в преобразователе определяется также его сопротивлением, которое особенно велико в рН-метре со стеклянным электродом (десятки и даже сотни мОм). Поэтому непосредственно измерить ЭДС можно лишь с помощью электронных усилителей с большим входным сопротивлением порядка 108... 1010 Ом. Чаще всего для этой цели применяют компенсационный метод. Как известно, в момент измерения входное сопротивление компенсатора практически равно бесконечности.
Наиболее значительной погрешностью рН-метров является температурная погрешность, так как при измерении температуры изменяется ЭДС измерительных полуэлементов и сопротивление преобразователя (особенно со стеклянным электродом). Для уменьшения температурной погрешности в измерительную цепь вводят элементы температурной компенсации, например в виде включения термочувствительного сопротивления, помещаемого в раствор.
Кроме того, у гальванических преобразователей может быть погрешность от наличия диффузионных потенциалов, возникающих на границе жидкостных контактов растворов, входящих в электрическую цепь преобразователя. Уменьшить эту погрешность, как было указано выше, для соединения испытуемого раствора с каломельным полуэлементом можно электролитическим ключом с полупроницаемыми пробками, заполненным насыщенным раствором КС1.
Как следует из самого принципа действия гальванических преобразователей, их применяют для измерения концентрации различных растворов по концентрации водородных ионов. Это дает
возможность контролировать технологические процессы в пищевом, бумажном, текстильном, резиновом производствах, в ряде производств химической промышленности и др.
8.3. ОБРАЩЕННЫЕ ПРЕОБРАЗОВАТЕЛИ
Обращенными (рис. 8.7) называются такие преобразователи, в которых электрическая величина преобразуется в неэлектрическую с тем, чтобы эту последнюю сравнивать с измеряемой неэлектрической величиной.
Обращенный преобразователь ОП подключен к источнику питания через регулирующее устройство РУ и измеритель Г.
Электрический параметр Э обращенного преобразователя преобразуется в неэлектрический Хк, который компенсирует измеряемую величину X. Регулируя электрический параметр Э до достижения равенства между Хк и X, можно по значению этого электрического параметра, измеряемого прибором Г, судить о значении измеряемой неэлектрической величины.
При изменении измеряемой величины X образующаяся разность АХ= Хк - X воздействует на нулевой указатель НУ. В качестве нулевого указателя используется, как правило, преобразователь неэлектрической величины в электрическую, т. е. тот или иной из описанных выше преобразователей. Таким образом, прибор с обращенным преобразователем обязательно имеет еще и прямой преобразователь. Если прибор выполнен с ручным уравновешиванием, то добиваются равенства X и Хк, регулируя вручную РУ до тех пор, пока НУ даст нулевое показание.
При автоматическом уравновешивании сигнал с преобразователя НУ поступает на электронный усилитель. Усиленный сигнал воздействует на исполнительный двигатель всякий раз, когда разность Х- Хк отлична от нуля. Двигатель же, в свою очередь, связан механически с регулирующим устройством РУ, при помощи которого получают равенство Хк = X.
Обращенными преобразователями могут служить многие из преобразователей, рассмотренных ранее, а также измерительные ме-
| РУ | ип | ||
| ЛХГ |
| НУ |
| ОП |
Рис. 8.7. Структурная схема прибора с обращенным преобразователем212
ханизмы, непосредственно преобразующие электрическую величину (чаще всего ток) во вращающий момент.
Применение многих ИМ в качестве обращенных преобразователей ограничивается требованием к стабильности функции преобразования, т.е. стабильности выходной неэлектрической величины, так как она определяет погрешность измерения прибором.
Использование того или иного ИМ в качестве обращенного преобразователя определяется характером требуемой неэлектрической величины. Например, преобразователями тока или напряжения в механическую силу могут служить электродинамические, электромагнитные ИМ, преобразователями во вращающий момент — измерительные механизмы приборов различных систем, а также счетчиков при отсутствии упругого противодействующего момента, преобразователями давления — электростатический ИМ и т.д. Рассмотрим принцип использования обращенных преобразователей.
На рис. 8.8 изображено использование магнитоэлектрического ИМ в качестве обращенного преобразователя для компенсации силы. Свободно подвешенная катушка 1 имеет витки, расположенные в горизонтальной плоскости. Сила взаимодействия Fмежду током в катушке и полем магнита 2 направлена вертикально вверх и компенсирует измеряемую силу, направленную ей навстречу. С помощью регулирующего устройства (на рисунке не показано) сила тока в рамке увеличивается (или уменьшается) до тех пор, пока силы Fh измеряемая сила взаимно не уравновесятся.
Широко применяется обращенный преобразователь, использующий магнитоэлектрический механизм для измерения моментов трения в подшипниках (рис. 8.9).
Рис. 8.8. Устройство обращенного магнитоэлектрического преобразователя:1 — катушка;2 — магнит
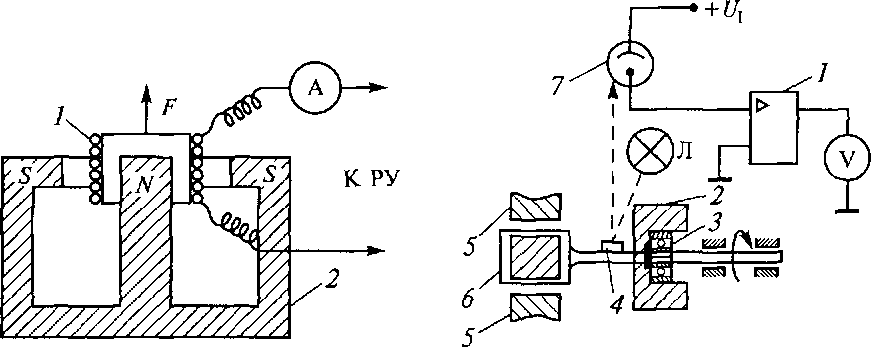 Рис. 8.9. Измеритель трения в подшипниках:
Рис. 8.9. Измеритель трения в подшипниках:
|
1 — усилитель; 2 — кольцо; 3 — подшипник; 4 — зеркальце; 5 — постоянный магнит; 6 — рамка; 7 — фото
элемент
Подшипник 3, момент трения в котором подлежит измерению, укреплен в кольце 2 и сидит на валу. При возникновении момента трения кольцо 2 поворачивается, одновременно поворачивается жестко скрепленная с ним рамка 6.
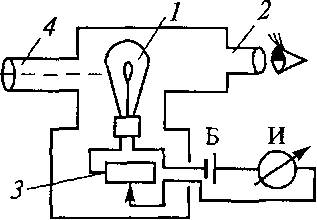 .10. Оптический пирометр:
1 — лампа накаливания; 2 — окуляр; 3 — реостат; 4 — телескоп
.10. Оптический пирометр:
1 — лампа накаливания; 2 — окуляр; 3 — реостат; 4 — телескоп
|
| Рис. |
На оси рамки закреплено зеркальце 4, освещаемое лампой Л. При повороте зеркальца луч света попадает на фотоэлемент 7, ток в цепи рамки усиливается усилителем постоянно-
го тока 7, и возникающий вследствие взаимодействия тока в рамке с полем постоянного магнита 5 вращающий момент уравновешивает момент трения в подшипнике. Таким образом, с увеличением измеряемого момента трения растет ток в рамке, являющийся мерой этого момента.
Весьма распространенными обращенными преобразователями являются преобразователи тока или напряжения в световой поток. Примером такого преобразователя служит оптический пирометр (рис. 8.10).
Здесь яркость исследуемого тела сравнивается с яркостью нити фотометрической лампы накаливания 7, являющейся в данном случае обращенным преобразователем. Яркость нити зависит от тока, величина которого регулируется изменением сопротивления реостата 3. Телескоп пирометра 4 направляют на раскаленное исследуемое тело таким образом, чтобы наблюдатель, смотрящий в окуляр 2, видел на фоне раскаленного тела нить фотометрической лампы.
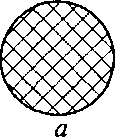
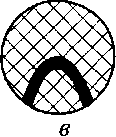
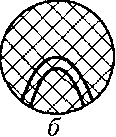
Изменяя силу тока в фотометрической лампе, добиваются совпадения яркости нити и исследуемого тела (рис. 8.11, а). На рис. 8.11, б, в соответственно изображены картины, которые видит глаз наблюдателя в случае, если яркость нити больше или меньше яркости исследуемого тела.
|
|
|
| яркость нити |
| Рис. 8.11. Изменение яркости нити по отношению к яркости исследуемого объекта: совпадают; б — яркость нити больше яркости объекта; в - меньше яркости объекта |
Прибор И (см. рис. 8.10) отградуирован таким образом, что показания его соответствуют измеряемой температуре или совпадению яркости нити и исследуемого тела.
8.4. ИНДУКЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ
Индукционными называют такие преобразователи, в которых скорость изменения измеряемой величины преобразуется в индуцируемую ЭДС. Они являются разновидностью электромагнитных преобразователей. В данных преобразователях естественной входной величиной является скорость механического перемещения (и поэтому непосредственно они могут применяться только для измерения скорости линейных и угловых перемещений), а выходной величиной — индуцированная ЭДС.
По принципу действия индукционные преобразователи можно разделить на две группы. В преобразователях первой группы индуцированная ЭДС наводится в катушке благодаря линейным или угловым колебаниям катушки в зазоре магнита (рис. 8.12, а, б).
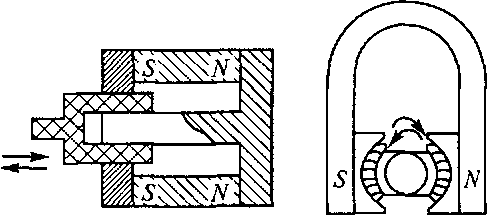 Рис. 8.12. Преобразователи с линейным (а)и угловым (б)перемещениями катушки
Рис. 8.12. Преобразователи с линейным (а)и угловым (б)перемещениями катушки
|
| б |
| а |
При своем перемещении витки катушки пересекают под прямым углом линии магнитного поля, и в них индуцируется ЭДС. Если линейное перемещение Д/ является некоторой функцией времени М = /(/), мгновенное значение ЭДС
|
(8.12)
где w — число витков катушки; В — индукция в зазоре; /а — активная длина витка.
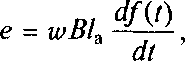
В преобразователях второй группы индуцированная ЭДС наводится путем изменения магнитного потока вследствие колебаний полного магнитного сопротивления магнитной цепи, создаваемых чаще всего изменением воздушного зазора в этой цепи (рис. 8.13).
На рис. 8.13, а изображена схема устройства датчика с индукционным преобразователем для измерения скорости вращения. На валу 1 укреплен стальной зуб, который при вращении вала проходит мимо зазора неподвижно установленной магнитной системы 2 с постоянным магнитом, уменьшая магнитное сопротивление зазора этой системы согласно кривой RM (рис. 8.13, б). В катушке, надетой на магнит, наводятся импульсы ЭДС, примерная
| J | и | и | |
| 2л | at |
Vat
Рис. 8.13. Датчик с индукционным преобразователем (а)и кривые Ям (б)
и е (в):
1 — вал; 2 — магнитная система
| / = |
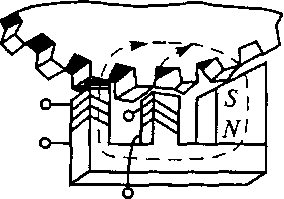 Рис. 8.14. Датчик в виде реактивного генератора с зубчатым ротором
Рис. 8.14. Датчик в виде реактивного генератора с зубчатым ротором
|
форма которых представлена кривой е (рис. 8.13, в). Независимо от качества выполнения магнитной системы, старения магнита, расстояния между валом и магнитом частота выходных импульсов в герцах всегда будет равна числу оборотов вала в секунду. В качестве индукционных преобразователей для измерения скорости удобно применять синхронные генераторы с ротором в виде постоянного магнита. Если число пар полюсов ротора равно р, то частота выходного сигнала
р to _ рп 2л ~ 60°'
где со — круговая скорость вращения, рад/с; п — число оборотов в минуту. Частота таких датчиков не превышает несколько сотен герц.
|
Для получения более высоких частот, при которых становится оправданным использование цифровых частотомеров, целесообразно строить датчик в виде реактивного генератора с зубчатым ротором (рис. 8.14). Магнитная цепь выполнена так, что когда под одной катушкой статора находится зубец ротора, происходит перераспределение магнитного потока постоянного магнита с частотой, определяемой скоростью вращения и числом зубцов; поток постоянного магнита остается неизменным, и потери в нем отсутствуют.
Еще более высокочастотные индукционные преобразователи можно построить, используя технику магнитной записи. Барабан с ферромагнитным покрытием, на который с помощью магнитной головки записано синусоидальное колебание, эквивалентен ротору с числом зубцов, равным числу периодов записанного колебания на окружности барабана.
(8.13)
Индукционный преобразователь данного типа состоит из магнитного барабана с нанесенной записью и считывающей магнитной головки. Магнитная запись в зависимости от зазора между барабаном и головкой позволяет разместить на каждом сантиметре поверхности барабана 50...250 импульсов при частоте считывания 100...200 кГц (соответствующей скорости вращения барабана 50... 100 об/с), т.е. заменяет зубчатый диск с 5...25 зубцами на 1 мм. К недостаткам преобразователя этого типа относятся технологические трудности, связанные с необходимостью выдерживать малый зазор между барабаном и считывающей головкой (до 30...50 мкН).
Расчет индукционных преобразователей. В преобразователях первой группы магнитный поток не изменяется, поэтому магнитную цепь и ЭДС преобразователя определяют обычными приемами расчета постоянных магнитов. В преобразователях второй группы расчет производится по величине изменения магнитного потока во времени.
|
Для повышения чувствительности преобразователя выгодно применять катушки с большим количеством витков, так как индуцируемая ЭДС прямо пропорциональна числу витков. Но сопротивление катушки Як, а следовательно, число витков должны находиться в соответствующем отношении с сопротивлением измерителя Rn. Условием наибольшей мощности, получаемой измерителем от преобразователя, в данном случае генератора ЭДС, является равенство сопротивлений катушки преобразователя и измерителя RK = Яи\
(8.14)
где р — удельное сопротивление провода; Dcp — средний диаметр катушки; S — заданная площадь окна катушки; ку — коэффици-
|
|
Таким образом, зная сопротивление измерителя, можно определить оптимальное число витков для заданных геометрических размеров катушки. При расчете катушки необходимо учитывать поле постоянного магнита и поле, обусловленное током в катушке от индуцируемого ЭДС.
Погрешности индукционного преобразователя. Они вызываются изменением его геометрических размеров, индукции постоянного магнита и удельного сопротивления цепи измерителя. Важное значение при расчете индукционных преобразователей имеет вопрос о компенсации температурной погрешности, так как чаще всего эти преобразователи используются на различных средствах транспорта в диапазоне температур -60... +50 °С. Применительно к преобразователям (см. рис. 8.12, а, б) сила тока в измерителе
/ = —-—. (8.15)
RK + RH
Здесь как числитель, так и знаменатель изменяются при изменении температуры с разными знаками. Индуцированная ЭДС Е с увеличением температуры уменьшается, так как индукция постоянных магнитов с ростом температуры падает примерно на 0,002...0,003% на 1 "С.
Катушка преобразователя наматывается из медной проволоки, сопротивление катушки RK имеет положительный температурный коэффициент. Сопротивление имеет, как правило, также положительный температурный коэффициент, величина которого зависит от соотношения между сопротивлением рамки (из меди) и добавочным сопротивлением (из манганина).
Значение силы тока Г в измерителе при повышении температуры на 0 градусов (относительно температуры при градуировке) можно подсчитать по формуле
£(1-89)
~ RK(\+aQ) + Ru (1+0(0)' ( )
где 8 — отрицательный температурный коэффициент индукции магнита; а — положительный температурный коэффициент сопротивления меди; а, — положительный температурный коэффициент сопротивления измерителя:
Лр + доб
где Rv— сопротивление рамки измерителя; Rao6 — добавочное сопротивление измерителя.
Данная формула справедлива лишь для простейшей схемы измерителя. В более сложных схемах усложняется и формула для подсчета коэффициента с^. Погрешность, обусловленная изменением температуры, отрицательна
Y = 100. (8.18)
Значение у тем меньше, чем меньше RK относительно RH и чем меньше температурная погрешность самого измерителя.
Одним из наиболее радикальных средств компенсации температурной погрешности является применение термомагнитного шунта к магниту преобразователя (если его конструкция это позволяет). Термомагнитный шунт прикрепляется таким образом, что он шунтирует магнитный поток в воздушном зазоре.
Термомагнитные шунты выполняют из специальных сплавов никеля и меди или никеля и железа. Данные сплавы в диапазоне температур - 80... +80 °С обладают весьма круто падающей кривой В = f(t). Таким образом, с увеличением температуры магнитный поток, ответвляющийся в термомагнитный шунт, уменьшается, за счет чего увеличивается часть общего потока магнита, ответвляющегося в зазор. Вследствие этого возрастает значение Е, а следовательно, и сила тока /.
При наличии в индукционном преобразователе диска или полого стаканчика материал для этих деталей следует брать с малым температурным коэффициентом — с целью компенсации температурной погрешности.
При проектировании индукционного преобразователя большое внимание следует уделять получению линейной зависимости, индуцируемой ЭДС от амплитуды перемещения катушки. Линейность преобразования для преобразователей первой группы зависит от размеров катушки и от ее расположения относительно полюсных наконечников. При рациональном выборе конфигурации магнитной цепи, размеров и положения катушки эта погрешность не превышает 0,5... 1 %. Линейность преобразования для преобразователей второй группы зависит от магнитных характеристик ферромагнитных материалов, из которых выполнена магнитная цепь, и так как эти характеристики нелинейны, эти преобразователи имеют большую погрешность от нелинейности. Нелинейность преобразователей второй группы можно уменьшить рациональным выбором рабочего зазора. Если погрешность остается большой, измеритель градуируется вместе с преобразователем.
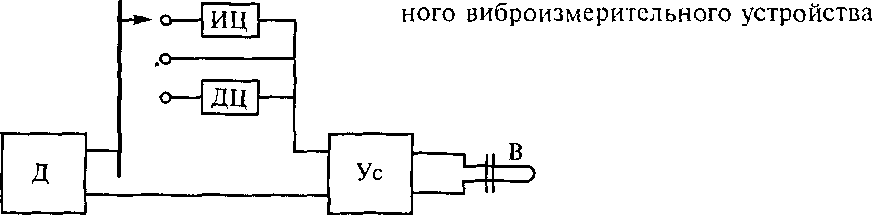
Применение индукционных преобразователей. Свойство выходного напряжения индукционного преобразователя изменяется пропорционально скорости перемещения подвижной части, что используется для построения универсальных виброизмерительных устройств, в измерительной цепи которых значения виброперемещений и виброускорений получаются путем интегрирования или дифференцирования выходного сигнала датчика. На рис. 8.15 приведена структурная схема промышленного универсального виброизмерительного устройства, позволяющая измерять перемещения, скорости и ускорения.
Сигнал сейсмического вибродатчика с индукционным преобразователем поступает через интегрирующую ИЦ или диффе
ренцирующую ДЦ цепь, или непосредственно в усилитель Ус, на выход которого подключен вибратор осциллографа. Выбор измеряемого параметра осуществляется при помощи переключателя П. Прибор имеет три канала, обеспечивающих работу в диапазоне частот 10...500 Гц при коэффициенте преобразования 70 мА/В по сигналу, 24-10~3 мА/В по интегралу входного сигнала и 175- 10~3 мА-с/В по производной входного сигнала при нагрузке на указатель с сопротивлением 1 Ом.
Другим направлением построения широкодиапазонных виброизмерительных приборов является использование корректирующих цепей, позволяющих использовать один и тот же датчик для измерения виброперемещений и виброускорений (рис. 8.16).
|
В зазоре между полюсным наконечником 2, напрессованным на постоянный магнит, и внешним магнитопроводом 8 помещена рабочая катушка 3 индукционного преобразователя, намотанная на дюралюминиевый каркас 1. В качестве упругих элементов используются плоские П-образные пружины 4. Винтами 5 и б пружины прикреплены одним концом к рабочей катушке, а другим — к корректирующей катушке 7. Последняя служит для коррекции погрешностей, обусловленных внешними магнитными полями, и включается встречно с рабочей катушкой. Успокоение системы электромагнитное и осуществляется за счет взаимодействия токов, индуцированных в каркасе и рабочей катушке, с полем постоянного магнита. Датчик имеет чувствительность око-
Рис. 8.16. Прибор для измерения виброперемещений и виброускорений:
Рис. 8.15. Структурная схема универсаль-
|
| п |
I — дюралюминиевый каркас; 2 — полюсный наконечник; 3 и 7 — соответственно рабочая и корректирующая катушки; 4 — П-образные пружины; 5 и 6 — винты; 8 — внешний маг- нитопровод
ло 50 мВ/мм, собственную резонансную частоту 18 Гц, степень успокоения р = 0,3, массу 300 г, диаметр 50 мм и длину 60 мм. Рабочий диапазон прибора по ускорению 0,03... 10g и по смещению 0,03... 10 мм. Погрешность измерения не более 10 %.
Индукционные преобразователи могут быть использованы для измерения постоянного ускорения и скорости.
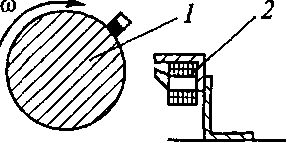
На рис. 8.17 показано принципиальное устройство прибора с индукционным обратным преобразователем, разработанным российскими учеными. Позже появилось сообщение о том, что на таком же принципе основан акселерометр, установленный в системе американской ракеты «Minitmen».
Под действием ускорения X" маятник, образованный постоянным магнитом 3, подвешенным на оси 5, отклоняется. Емкостный преобразователь недокомпенсации 4 выходит из равновесия, выходной сигнал усиливается усилителем и поступает на обмотку двигателя 1. Двигатель вращает диск 2, расположенный между полюсами постоянного магнита. Возникающий момент уравновешивает момент маятника. Скорость вращения диска, т.е. частота со, пропорциональна ускорению и является выходной величиной прибора.
Широкое распространение для измерения скорости получили различного рода тахометры. Тахометры с амплитудной модуляцией обычно выполняются с индукционным преобразователем (генератором постоянного или переменного тока), выходной величиной которых является ЭДС. Для измерения скорости также используются частотные тахометры (с частотной модуляцией), которые являются наиболее простыми и точными. В качестве образцового отрезка пути в этих датчиках используется полный оборот 360 Измерителем в данном тахометре может служить герцметр. Индукционные преобразователи чаще всего используют в частотных датчиках тахометров. Они просты, надежны, дают большую выходную мощность.
Недостатки: необходимость непосредственного доступа к валу; зависимость амплитуды выходного сигнала от измеряемой скорости вращения, что затрудняет измерение малых скоростей, а также со- :шаваемый им тормозной момент.
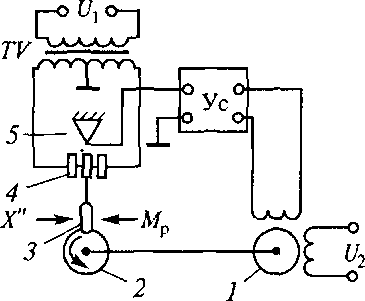 Рис. 8.17. Устройство прибора для измерения постоянного ускорения и скорости:
1 — двигатель; 2 — диск; 3 — постоянный магнит; 4 — преобразователь недокомпенсации; 5 — ось
Рис. 8.17. Устройство прибора для измерения постоянного ускорения и скорости:
1 — двигатель; 2 — диск; 3 — постоянный магнит; 4 — преобразователь недокомпенсации; 5 — ось
|
На рис. 8.18 показан принцип конструкции тахометра с индукционным преобразователем.
Магнит гибким валом связан с испытуемым объектом. В поле магнита, вращающегося со скоростью со, расположен металлический диск /, укрепленный на валу 3. На этом же валу укреплены один конец пружинки 4 из фосфористой бронзы и стрелка 2, угол а поворота которой является выходной величиной прибора. При вращении магнит увлекает за собой диск. Под действием вращающего момента пружина, имеющая удельный противодействующий момент W, закручивается на угол, прямо пропорциональный измеряемой скорости.
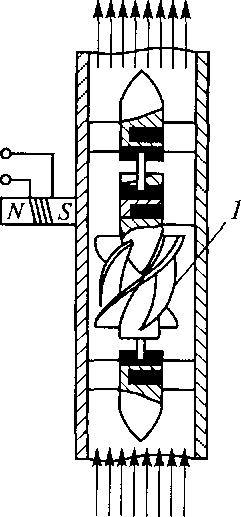
Индукционные преобразователи используются также и для измерения объемного расхода жидкости или газа, протекающего по трубопроводу в единицу времени. На рис. 8.19 представлена схема устройства турбинного крыльчатого тахометрического датчика. Он представляет собой отрезок трубы, в котором установлена небольшая осевая турбинка 1.
Под действием потока жидкости в трубе ротор турбинки вращается со скоростью, доходящей до 250 об/с. Скорость вращения турбинки преобразуется в частоту электрических колебаний любым из описанных выше индукционным преобразователем. Погрешность датчиков такого типа можно довести до 0,35 %. Погрешность целиком определяется погрешностью преобразования расхода в скорость вращения турбинки и зависит от сил сопротивления вращению ротора, возникающих от трения в подшипниках, вязкости жидкости и тормозного момента индукционного преобразователя.
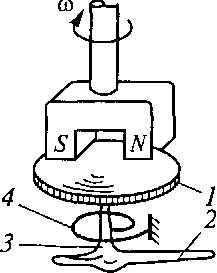 Рис. 8.18. Тахометр с индукционным преобразователем:
1 — металлический диск; 2 — стрелка; 3 — вал; 4 — пружинка
Рис. 8.18. Тахометр с индукционным преобразователем:
1 — металлический диск; 2 — стрелка; 3 — вал; 4 — пружинка
|
|
Частотные датчики расходомеров могут работать как с аналоговым измерительным устройством типа конденсаторного частотомера, так и с цифровым частотомером. Результирующая погрешность в первом случае составляет 1...2%, во втором — может быть менее 0,5%.
В индукционном расходомере (рис. 8.20) используется эффект возникновения электрического тока в проводнике, перемещающемся в магнитном поле.
Рис. 8.19. Устройство турбинного крыльчатого тахометрического датчика:1 — осевая турбинка
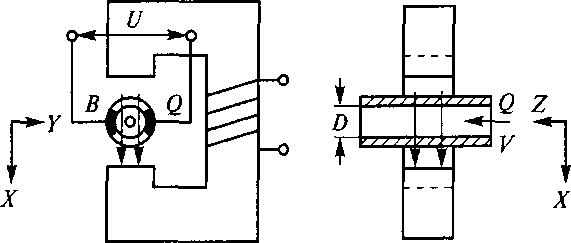 Рис. 8.20. Устройство индукционного расходомера
Рис. 8.20. Устройство индукционного расходомера
|
Протекающая жидкость отождествляется с проводником, т.е. она должна обладать определенной минимальной проводимостью. Согласно закону Фарадея, в обладающей электрической проводимостью жидкости Q, протекающей через магнитное поле, возникает электрическое поле.
Контролируемый поток протекает по армированной изолятором трубе, в стенах которой перпендикулярно направлению магнитного поля и потока среды установлены два диаметрально расположенных электрода В, с которых снимается напряжение U, пропорциональное средней скорости потока среды. Этот образованный высокоомным источником сигнал, величина которого имеет несколько милливольт, с помощью кабеля подается на измерительный преобразователь, усиливающий его и осуществляющий его дальнейшую обработку. Индукционные преобразователи, например фазовые датчики торсиометров, могут быть также использованы для измерения крутящего момента.
8.5. ТЕРМОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Термоэлектрические преобразователи относятся к типу тепловых преобразователей и основаны на явлении термоэлектричества, открытого акад. Ф.Эпинусом (1759). Явление термоэлектричества заключается в следующем. Если составить цепь из двух различных проводников (или полупроводников) А и В и соединить их между собой концами (рис. 8.21, а), причем температуру ^ одного места соединения сделать отличной от температуры /0 другого, в цепи появится ЭДС, называемая термоэлектродвижущей силой (термоЭДС). Она является следствием разности функций температур мест соединения проводников
Елв^Л) = №)-&). (8.19)
Данная цепь называется термоэлектрическим преобразователем или термопарой; проводники, составляющие термопару, — термоэлектродами, а места их соединения — спаями.
Термопару можно использовать для измерения температуры. Если один спай термопары (рабочий спай) поместить в среду с температурой которую нужно измерить, а температуру другого (нерабочего) спая поддерживать постоянной /(/0) = const, то
ЕЛв&,Ь) = Ш = fifr).
Последнее выражение положено в основу измерения температур при помощи термопар.
Таким образом, входной величиной термопары является тем пература рабочего спая, а выходной величиной — термоЭДС, которую термопара развивает при строго постоянной температуре tQ нерабочего спая.
Приборы, представляющие собой сочетание термопары и изме рителя, используемые для измерения температуры, называются тер моэлектрическими пирометрами.
Включить измеритель (указатель) в цепь термопары можно по двум схемам (рис. 8.21, б и в), а для того чтобы включение в цепь термопары указателя не изменило значения термоЭДС, места со единения указателя с термоэлектродами должны иметь одинаковую температуру.
Для измерения температур до 1100 °С используют термопары и основном из неблагородных металлов, для измерения температур свыше 1100... 1600 °С — термопары из благородных металлов платиновой группы, а для измерения температур более 1600 °С — термопары из жароупорных материалов (вольфрам — молибден). На правление термоЭДС зависит лишь от природы материалов, используемых в качестве термоэлектродов. Положительным называют тот термоэлектрод, по направлению к которому ток идет через рабочий спай термопары.
В табл. 8.1 приведены термоЭДС, которые развиваются различными термоэлектродами в паре с платиной при температурах
рабочего спая tx = 100 °С и нерабочего спая t0 = 0 °С. При конструировании термопар стремятся сочетать термоэлектроды, один из которых развивает с платиной наиболее положительную, а другой — отрицательную термоЭДС. Необходимо также учитывать пригодность того или иного термо электрода для применения в заданных условиях измерения (вли яния на термоэлектрод среды, температуры и т.д.).
 Рис. 8.21. Термоэлектрические преобразователи
Рис. 8.21. Термоэлектрические преобразователи
|
Наиболее распространены в практике термопары: платиноро
Таблица 8.1
|
дий — платина, хромель — алюмель, хромель — копель, вольфрам — молибден, борид-карбид циркония.
Из неблагородных металлов стандартными и наиболее распространенными термопарами являются четыре, основные характеристики которых указаны в табл. 8.2.
Устройство термопары промышленного типа, применяемое для измерения температур в печах, соляных ваннах, газоходах, рассмотрим на примере термопары, изображенной на рис. 8.22.
Эта термопара из неблагородных металлов расположена в составной защитной трубе с подвижным фланцем для ее крепления. Рабочий спай 9 термопары изолирован от трубы фарфоровым наконечником 8. Термоэлектроды изолированы бусами 6. Защитная труба состоит из рабочего 7 и нерабочего 4 участков. Передвижной фланец 5 крепится к трубе винтом. Головка термопары имеет литой корпус 3 с крышкой 11, закрепленной винтами 1. В головке винтами укреплены фарфоровые колодки 2 с незакрепленными
8 Раннев
Таблица 8.2
|
зажимами 10. Они позволяют термоэлектродам удлиняться под воздействием температуры без возникновения механических напряжений, ведущих к быстрому разрушению термоэлектродов.
Основным вопросом при конструировании термопар промышленного типа является выбор материала защитной трубы (арматуры) и изоляции.
Защитная арматура термопары должна ограждать ее от воздействия горячих химически агрессивных газов, которые быстро разрушают термопару, поэтому арматура должна быть газонепроницаемой, хорошо проводить теплоту, быть механически стойкой и жароупорной. При температурах до 600 °С обычно применяют стальные трубы без шва, при температуре до 1100 °С — защитные трубы из легированных сталей, для термопар из благородных металлов — в основном кварцевые, фарфоровые трубы. В качестве изоляции термоэлектродов друг от друга до 300 °С используют асбест; до 1300... 1400°С — фарфоровые трубки или бусы и до 2000... 2500 "С — кварцевые трубки или бусы. В лабораторных условиях при измерении низких температур используют теплостойкую резину —до 150 °С; шелк — до 100... 120°С; эмаль —до 150...200°С.
Термоэлектроды термопары, помещаемые в защитную трубу, обычно выполняются жесткими, а соединения их с другими элементами измерительной цепи осуществляется гибкими проводами. Соединительные провода, идущие от зажимов в головке термопары до места нахождения нерабочего спая, называются удлинительными электродами. Эти электроды в необходимом диапазоне температур должны иметь такую же термоЭДС, как и электроды основной термопары, и места присоединения удлинительных термоэлектродов к основным термоэлектродам в головке тер-
Рис. 8.22. Устройство термопары промышленного типа:
/ — винты; 2 — фарфоровые колодки; 3 — корпус; 4 и 7— соответственно нерабочий и рабочий участки; 5— передвижной фланец; 6— бусы; 8 — фарфоровый наконечник; 9— рабочий спай; 10 — зажимы; 11 — крышка
мопары должны быть одинаковой температуры. При невыполнении этих условий возникает погрешность измерения. Удлинительные термоэлектроды для термопар из неблагородных металлов выполняются из тех же материалов, что и основные термоэлектроды.
Например, для термопары платиноро- дий—платина применяют удлинительные термоэлектроды из меди и сплава ТП, образующие термопару, термоидентичную термопаре платинородий — платина в пределах до 150°С.
Большое значение при измерении температуры с помощью термопар имеет их инерционность, определяемая как время,
за которое показания термопары при переносе из среды с комнатной температурой (15...20°С) в среду с температурой 100°С достигают 97... 98 °С. Для уменьшения инерционности необходимо обеспечить хороший тепловой контакт между рабочим спаем термопары и средой с измеряемой температурой.
|
Погрешности термоэлектрических преобразователей и методы их коррекции. Погрешность, обусловленная изменением температуры нерабочих спаев термопары. Градуировка термопар осуществляется при температуре нерабочих спаев, равной нулю. Если при практическом использовании термопары температура нерабочих спаев будет отличаться от 0 °С, это вызовет появление погрешности измерения. Для ее устранения нерабочие спаи термостатируют в ванне с тающим льдом, т.е. при t= 0°С. Такой способ не всегда применим. Следует термоста- тировать нерабочие спаи, чтобы температура их либо сохранялась постоянной во времени, либо изменялась возможно медленнее при изменении окружающей температуры. Термостатирование осуществляется либо погружением рабочих спаев на достаточную глубину в землю, что обеспечивает постоянство температуры в течение года, либо помещением их в массивную коробку с тепловой изоляцией, снабженную ртутным термометром и двумя штуцерами для ввода удлинительных и медных проводов. Обладая боль
шой тепловой инерцией, коробка достаточно медленно реагирует на изменение внешней температуры.
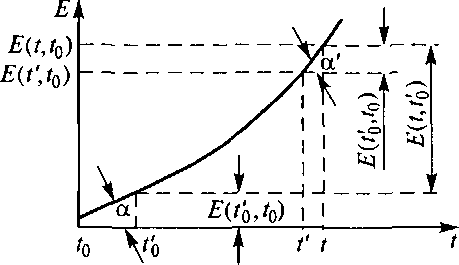
Наиболее радикальным средством стабилизации температуры нерабочего спая является автоматическое термостатирование с электрическим подогревом. Если температура нерабочего спая известна, ввести соответствующую поправку к показаниям термоэлектрического термометра можно следующим образом. Пусть имеется градуировочная кривая термопары Е = f(t) (рис. 8.23).
Градуировка термопары производилась при температуре t0 = О "С. Положим, что термопарой нужно измерить температуру t при температуре нерабочих спаев t'a большей, чем г0. ТермоЭДС E(t, 1'й) термопары в этом случае будет меньше термоЭДС E(t, t0), которая была бы при той же температуре t рабочего спая, но при температуре нерабочих спаев t0. ТермоЭДС термопары уменьшится на величину E(to, t0) и окажется равной (см. рис. 8.23) термоЭДС E(to, to), которая была бы при температуре нерабочего спая, равной t', и температуре рабочего спая, равной t'0, т.е.
E(t',t0) = E(t,t0)-E(tit).
В результате по шкале будет отсчитано значение температуры < t.
Если прибор имеет линейную шкалу или двойную шкалу и в градусах температуры, и в милливольтах, ввести поправку на температуру свободных концов согласно уравнению несложно. Труднее, когда прибор имеет нелинейную шкалу и только в градусах температуры.
Из рис. 8.23 видно, что
E(ta,t0) = (to -t)Miga=(t-t')Mtga', где M — масштабный коэффициент мВ/°С. Откуда поправка
(t-t') = (t'0-t0)^ = (t'-f0)k. (8.20) tga v 7
|
При резко выраженной нелинейной шкале коэффициент к, называемый поправочным коэффициентом на температуру нерабочих спаев, является функцией t и, следовательно, для каждого
Рис. 8.23. Градуировочная кривая термопары
участка кривой будет различным. Практически в этом случае градуировочную кривую делят на участки по 100°С и для каждого участка определяют к. Для грубых подсчетов можно принять к= 0,8... 1,0 для термопар из неблагородных металлов и к = 0,5... 0,6 для термопар из благородных металлов.
Погрешность, обусловленная изменением температуры линии, термопары и указателя. В термоэлектрических пирометрах для измерения термоЭДС применяют обычные милливольтметры и низкоомные компенсаторы с ручным или автоматическим уравновешиванием на предел измерения до 100 мВ. В тех случаях, когда термоЭДС измеряется компенсатором, сопротивление цепи термоЭДС, как известно, роли не играет; в тех случаях, когда термоЭДС измеряется милливольтметром, может возникнуть погрешность, вызванная колебаниями температуры всех элементов цепи термоЭДС.
Сила тока милливольтметра, включенного в цепь термопары:
/ =----------------- , (8.21)
RyK + Rn + RT
где Е— термоЭДС, развиваемая термопарой; /?ук, Rn, R^ — сопротивления указателя, проводов и термопары.
Милливольтметр измеряет напряжение на своих зажимах:
UyK=E-I(Rn+
Дата добавления: 2015-04-11; просмотров: 611; Мы поможем в написании вашей работы!; Нарушение авторских прав