КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Кинематика плоскопараллельного движения твердого тела
Плоскопараллельным (плоским) движением твердого тела называется такое движение, при котором траектории всех его точек лежат в плоскостях, параллельных некоторой неподвижной плоскости. Пусть тело движется параллельно некоторой неподвижной плоскости П (рис. 23). Если пересечь данное тело плоскостью хОу, параллельной неподвижной плоскости П, то в сечении получится какая-то плоская фигура S. Эта фигура будет перемещаться при движении тела, оставаясь все время в той же плоскости хОу. Очевидно, что при таком движении тела все его точки, лежащие на перпендикуляре Аа к плоскости фигуры, движутся совершенно одинаково, так же как и точка А этой фигуры. Все точки, расположенные на перпендикуляре Вв к плоскости фигуры , движутся так же, как и точка В этой фигуры, и т. д. Отсюда следует, что для определения плоского движения тела достаточно знать движение плоской фигуры в ее плоскости.
Положение неизменяемой плоской фигуры S в ее плоскости вполне определяется положением двух произвольных ее точек А и В. Следовательно, изучение движения плоской фигуры в ее плоскости сводится к изучению движения прямолинейного отрезка АВ, с которым фигура неизменно связана. Но положение отрезка АВ определяется двумя координатами хА и уА точки А, называемой полюсом и углом j, который образует этот отрезок с некоторой осью неизменного направления, лежащей в плоскости данной фигуры (рис. 24).

Рис. 23

Рис. 24
Таким образом, движение плоской фигуры в ее плоскости можно определить следующими тремя уравнениями:
xA = хA (t),
yA = yA (t),
j = j (t).
Из этих уравнений следует, что движение плоской фигуры можно разложить на два движения: 1) поступательное движение вместе с полюсом А и определяемое первыми двумя уравнениями и 2) вращательное движение вокруг полюса, определяемое третьим уравнением. При этом угловая скорость вращательного движения не зависит от выбора полюса. Очевидно, что скорость любой точки В плоской фигуры равна геометрической сумме двух скоростей: скорости полюса  и скорости
и скорости  точки В во вращательном движении вокруг полюса (рис. 25), т. е.
точки В во вращательном движении вокруг полюса (рис. 25), т. е.
 = + ,
= + ,
причем ^ АВ и  = w×АВ.
= w×АВ.
Отсюда следует теорема о проекциях скоростей точек плоской фигуры: проекции скоростей двух точек плоской фигуры на ось h, проходящую через эти точки, равны между собой.
Мгновенным центром скоростей (МЦС) называется такая точка Р плоской фигуры, скорость которой в данный момент равна нулю.
Если известны скорость какой-либо точки А плоской фигуры и угловая скорость w этой фигуры, то, повернув вектор вокруг точки А на 90° в направлении вращения фигуры и отложив на этой полупрямой отрезок
АР =  /w,
/w,
получим точку Р, которая является МЦС (рис. 25).

Рис. 25
Если же известны направления скоростей двух точек плоской фигуры, то МЦС находят как точку пересечения перпендикуляров, восстановленных в этих точках к направлениям их скоростей.
Если мгновенный центр скоростей Р найден и если известна угловая скорость фигуры, то скорость любой точки В фигуры определяется как скорость этой точки во вращательном движении вокруг МЦС, т. е. вектор перпендикулярен к отрезку РВ и по модулю равен w×РВ. Отсюда следует, что скорости точек плоской фигуры пропорциональны их расстояниям от мгновенного центра скоростей, т. е.

Отметим другие случаи нахождения положения МЦС.
Если скорости точек А и В параллельны и АВ ^ , то для определения положения МЦС следует воспользоваться свойством пропорциональности скоростей расстояниям точек до мгновенного центра скоростей. На рис. 26, а, б представлено, как находится МЦС в этих случаях.
На рис. 26, в показан случай, когда и параллельны, но неперпендикулярна отрезку АВ. Очевидно, что в этом случае прямые Аа и Вв, перпендикулярные и , пересекаются в бесконечности и мгновенного центра скоростей не существует, а угловая скорость фигуры равна нулю (w = 0). На основании теоремы о проекциях скоростей имеем VA×cos a = VB×cos a, отсюда VA = VB и = . Значит, в данный момент времени скорости всех точек плоской фигуры равны по модулю и направлению.

Рис. 26
При качении без скольжения одного тела по поверхности неподвижного другого (рис. 26, г) МЦС совпадает с точкой Р соприкосновения тел (так как при отсутствии скольжения скорость точки соприкосновения равна нулю).
Ускорение любой точки движущейся плоской фигуры можно определить как геометрическую сумму ускорений этой точки в поступательном движении вместе с некоторым полюсом и вращательным движением вокруг этого полюса.
Если известны ускорение  некоторой точки А фигуры (ускорение полюса), а также угловая скорость w и угловое ускорение e фигуры, то ускорение любой ее точки В определяется по формуле
некоторой точки А фигуры (ускорение полюса), а также угловая скорость w и угловое ускорение e фигуры, то ускорение любой ее точки В определяется по формуле
 =
=  +
+  = +
= +  +
+  .
.
Здесь вектор - ускорение точки В во вращательном движении вокруг полюса А; и - нормальная и касательная составляющие этого вектора, которые вычисляем по формулам:
 = w2 × АВ,
= w2 × АВ,  = e × АВ.
= e × АВ.
При этом вектор направлен вдоль ВА (от точки В к точке А), а вектор перпендикулярен к ВА (рис. 27).

Рис. 27
Ускорение точки В можно определить, если спроецировать векторное равенство
= + +
на оси х и у (см. рис. 27) и найти проекции этого ускорения:
 =
=  –
–  ,
,  =
=  +
+  .
.
По проекциям находят модуль ускорения точки В:

Указания. Задача К2 – на исследование плоскопараллельного движения твердого тела. При ее решении для определения скоростей точек механизма и угловых скоростей его звеньев следует воспользоваться теоремой о проекциях скоростей двух точек тела и понятием о мгновенном центре скоростей, применяя эту теорему (или это понятие) к каждому звенумеханизма в отдельности.
При определении ускорений точек механизма исходить из векторного равенства  =
=  +
+  +
+  , где А – точка, ускорение которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то =
, где А – точка, ускорение которой или задано, или непосредственно определяется по условиям задачи (если точка А движется по дуге окружности, то =  +
+  ); В – точка, ускорение которой нужно определить (о случае, когда точка В тоже движется по дуге окружности, см. примечание в конце рассмотренного ниже примера К2).
); В – точка, ускорение которой нужно определить (о случае, когда точка В тоже движется по дуге окружности, см. примечание в конце рассмотренного ниже примера К2).
Пример К2. Механизм (рис. К2а) состоит из стержней 1, 2, 3, 4 и ползуна В, соединенных друг с другом и с неподвижными опорами O1 и О2 шарнирами.
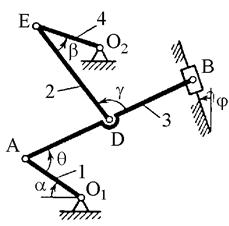

Рис. К2а Рис. К2б
Дано: a = 60°, b = 150°, g = 90°, j = 30°, q = 30°, AD = DB, l1 = 0,4 м, l2= 1,2 м, l3 = 1,4 м, w1 = 2 c–1, e1 = 7 с–2 (направления w1 и e1 – против хода часовой стрелки). Определить: VB, VE, w2, aB, e3.
Решение.1. Строим положение механизма в соответствии с заданными углами (рис. К2б; на этом рисунке изображаем все векторы скоростей).
2. Определяем VB. Точка В принадлежит стержню АВ. Чтобы найти VB, надо знать скорость какой-нибудь другой точки этого стержня и направление  . По данным задачи, учитывая направление w1, можем определить
. По данным задачи, учитывая направление w1, можем определить  ; численно
; численно
VA = w1×l1 = 0,8 м/с; ^ О1А. (45)
Направление найдем, учтя, что точка В принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная и направление , используем теорему о проекциях скоростей двух точек тела (стержня АВ) на прямую, соединяющую эти точки (прямая АВ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим:
VВ × cos 30° = VA × cos 60° и VВ = 0,46 м/с. (46)
3. Рассчитываем  . Точка Е принадлежит стержню DE. Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки D, принадлежащей одновременно стержню АВ. Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня АВ; это точка С3, лежащая на пересечении перпендикуляров к и , восставленных из точек А и В (к перпендикулярен стержень 1). По направлению вектора определяем направление поворота стержня АВ вокруг МЦС С3. Вектор
. Точка Е принадлежит стержню DE. Следовательно, по аналогии с предыдущим, чтобы определить , надо сначала найти скорость точки D, принадлежащей одновременно стержню АВ. Для этого, зная и , строим мгновенный центр скоростей (МЦС) стержня АВ; это точка С3, лежащая на пересечении перпендикуляров к и , восставленных из точек А и В (к перпендикулярен стержень 1). По направлению вектора определяем направление поворота стержня АВ вокруг МЦС С3. Вектор  перпендикулярен к отрезку С3D, соединяющему точки D и С3, и направлен в сторону поворота. Величину VD найдем из пропорции
перпендикулярен к отрезку С3D, соединяющему точки D и С3, и направлен в сторону поворота. Величину VD найдем из пропорции
 (47)
(47)
Чтобы вычислить С3D и С3B, заметим, что DAС3В – прямоугольный, так как острые углы в нем равны 30° и 60°, и что С3В = AB × sin 30° = 0,5 × AB = ВD. Тогда DВС3D является равносторонним и С3B = С3D. В результате равенство (47) дает:
VD = VB = 0,46 м/с; ^ C3D. (48)
Так как точка Е принадлежит одновременно стержню O2E, вращающемуся вокруг O2, то ^ O2E, тогда, проведя из точек Е и Dперпендикуляры к скоростям и , построим МЦС С2 стержня DE. По направлению вектора определяем направление поворота стержня DE вокруг центра С2. Вектор направлен в сторону поворота этого стержня. Из рис. К2б видно, что ÐC2ED = ÐC2DE = 30°, откуда C2E = C2D. Составив теперь пропорцию, найдем, что
 VE = VD = 0,46 м/с. (49)
VE = VD = 0,46 м/с. (49)
4. Определяем w2. Так как МЦС стержня 2 известен (точка С2) и С2D = l2/(2 × cos 30°) = 0,69 м, то
 c–1. (50)
c–1. (50)
5. Определяем  (рис. К2в, на котором изображены все векторы ускорений). Точка В принадлежит стержню АВ. Чтобы найти , надо знать ускорение какой-нибудь другой точки стержня АВ и траекторию точки В. По данным задачи можем определить
(рис. К2в, на котором изображены все векторы ускорений). Точка В принадлежит стержню АВ. Чтобы найти , надо знать ускорение какой-нибудь другой точки стержня АВ и траекторию точки В. По данным задачи можем определить  =
=  +
+  , где численно
, где численно
 = e1 × l1 = 2,8 м/с2;
= e1 × l1 = 2,8 м/с2;
(51)
 =
=  × l1 = 1,6 м/с2.
× l1 = 1,6 м/с2.

Рис. К2в
Вектор направлен вдоль AO1, а – перпендикулярно к AO1; изображаем эти векторы на чертеже (см. рис. К2в). Так как точка В одновременно принадлежит ползуну, то вектор параллелен направляющим ползуна. Изображаем вектор на чертеже, полагая, что он направлен в ту же сторону, что и .
Для определения воспользуемся равенством
= + +  + . (52)
+ . (52)
Изображаем на чертеже векторы  (вдоль ВА от В к А) и (в любую сторону перпендикулярно к ВА); численно
(вдоль ВА от В к А) и (в любую сторону перпендикулярно к ВА); численно  = w32 × l3. Находим w3 с помощью МЦС C3 стержня 3:
= w32 × l3. Находим w3 с помощью МЦС C3 стержня 3:
 c–1 и
c–1 и  = 0,61 м/с2. (53)
= 0,61 м/с2. (53)
Таким образом, у величин, входящих в равенство (52), неизвестны только числовые значения аВ и  ; их можно найти, спроектировав обе части равенства (52) на какие-нибудь две взаимно перпендикулярные оси.
; их можно найти, спроектировав обе части равенства (52) на какие-нибудь две взаимно перпендикулярные оси.
Чтобы определить аВ, спроектируем обе части равенства (52) на направление ВА (ось х), перпендикулярное к неизвестному вектору . Тогда получим:
аВ× сos 30° =  × cos 60° –
× cos 60° –  × cos 30° + . (54)
× cos 30° + . (54)
Подставив в равенство (54) числовые значения всех величин из (51) и (53), найдем, что
аВ = 0,72 м/с2. (55)
Так как получилось аВ > 0, то, следовательно, вектор направлен как показано на рис. К2в.
6. Находим e3. Чтобы найти e3, сначала вычислим . Для этого обе части равенства (52) спроектируем на направление, перпендикулярное АВ (ось у). Тогда получим:
– аВ× sin 30° = × sin 60° + × sin 30° + . (56)
Подставив в равенство (56) числовые значения всех величин из (55) и (51), найдем, что = – 3,58 м/с2. Знак указывает, что направление противоположно показанному на рис. К2в. Теперь из равенства  = e3 × l3 получим:
= e3 × l3 получим:
 c–2.
c–2.
Ответ: VB = 0,46 м/с; VE = 0,46 м/с;
w2 = 0,67 с1; аB = 0,72 м/с2; e3 = 2,56 с–2.
Примечание 1. Если точка B, ускорение которой определяется, движется не прямолинейно (например, как на рис. К2.0–К2.4, где В движется по окружности радиуса О2В), то направление заранее неизвестно.
В этом случае также следует представить двумя составляющими ( =  +
+  ) и исходное уравнение (52) примет вид
) и исходное уравнение (52) примет вид
+ = +  + + . (57)
+ + . (57)
При этом вектор (см., например, рис. К2.0) будет направлен вдоль BO2, а вектор – перпендикулярно ВО2 в любую сторону. Числовые значения  ,
,  и определяются так же, как в рассмотренном примере (в частности, по условиям задачи может быть = 0 или = 0, если точка А движется прямолинейно).
и определяются так же, как в рассмотренном примере (в частности, по условиям задачи может быть = 0 или = 0, если точка А движется прямолинейно).
Значение  вычисляется по формуле =
вычисляется по формуле =  /r = /l, где l – радиус окружности О2В, а
/r = /l, где l – радиус окружности О2В, а  определяется так же, как скорость любой другой точки механизма.
определяется так же, как скорость любой другой точки механизма.
После этого в равенстве (57) остаются неизвестными только значения  и и они, как и в рассмотренном примере, находятся проецированием обеих частей равенства (57) на две взаимно-перпендикулярные оси.
и и они, как и в рассмотренном примере, находятся проецированием обеих частей равенства (57) на две взаимно-перпендикулярные оси.
Найдя  , можем вычислить искомое ускорение
, можем вычислить искомое ускорение  . Величина служит для нахождения eАВ (как в рассмотренном примере).
. Величина служит для нахождения eАВ (как в рассмотренном примере).
Примечание 2. Если требуется определить ускорение точки D звена АВ (рис. К2г), то следует воспользоваться векторным равенством:
 = + +
= + +  +
+  .
.

Рис. К2г
Ускорение точки D найдем по его проекциям на координатные оси, спроецировав приведенное выше векторное равенство на эти оси:
 = × cos 60° – × cos 30° +
= × cos 60° – × cos 30° +  ,
,
 = × sin 60° + × sin 30° +
= × sin 60° + × sin 30° +  .
.
Здесь = w32×AD, = e3×AD.
Вектор направлен от точки D к точке А, а вектор перпендикулярен к DА.

Дата добавления: 2015-04-15; просмотров: 314; Мы поможем в написании вашей работы!; Нарушение авторских прав |