КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Таким образом, электродвигатели могут работать в двигательном и тормозном режимах.
Режимы работы электродвигателей
В процессе выполнения своих функций электродвигатели работают в нескольких режимах: пуск, работа с номинальными данными, торможение и остановка.
Пуск, торможение и остановка электродвигателя относятся к неустановившимся режимам работы, так как в эти периоды величины, характеризующие работу электродвигателя, постоянно меняются.
В соответствии с требованиями технологического процесса зачастую возникает необходимость в регулировании частоты вращения машин и механизмов. Регулирование можно осуществлять механическими (применение различных муфт, изменение передаточного числа редуктора и т. д.) и электрическими способами (изменение схем включения двигателя, параметров питающей сети).
Электрические способы регулирования оказались наиболее простыми и точными, позволяющими автоматизировать многие производственные процессы.
Для целей регулирования электродвигателей зачастую используют обратимость электрических машин. Так, в периоды пуска машины в работу и производительной работы ее электродвигатель работает по прямому назначению, т. е. создает на валу машины вращающий момент, а в периоды, когда необходимо уменьшить скорость или плавно остановить машину, он превращается в генератор электрической энергии, который вращается за счет запасенной машиной кинетической энергии. Генерируемая электроэнергия отдается в сеть или гасится в сопротивлениях - электродвигатель тормозит движение машины.
Таким образом, электродвигатели могут работать в двигательном и тормозном режимах.
Существует три способа торможения электродвигателей:
· генераторное (рекуперативное) торможение с отдачей электроэнергии в сеть. Двигатель преобразует кинетическую энергию механизма в электрическую. Режим возможен тогда, когда частота вращения вала двигателя станет больше частоты вращения по идеального холостого хода двигателя;
· торможение противовключением происходит тогда, когда двигатель под воздействием сил, действующих со стороны рабочей машины, вращается в направлении, противоположном тому, на которое включены его обмотки;
· динамическое торможение происходит при условии, когда двигатель работает генератором на внешнее сопротивление.
Пуск,торможение и регулирование частоты вращения двигателей постоянного тока
Пуск двигателей постоянного тока осуществляется с помощью специального пускового сопротивления, включенного в цепь якоря. Сопротивление пускового реостата подбирается так, чтобы пусковой ток был не более 200— 250% номинального и чтобы за период пуска двигателя реостат не перегревался. В процессе пуска величина сопротивления реостата постепенно уменьшается до 0. При данном способе пуска часть энергии расходуется на нагрев реостата.
Применяется и другой, более совершенный и экономичный способ - плавное повышение напряжения па зажимах двигателя. Этот способ возможен при наличии управляемого преобразователя.
Оба эти способа могут применяться и для регулирования частоты вращения двигателей.
Широкое распространение в электроприводе рудничных машин получил способ регулирования частоты вращения двигателя независимого возбуждения путем изменения величины напряжения, подводимого к зажимам якоря. Питание якоря осуществляется от индивидуального, регулируемого источника постоянного тока: машинного генератора (система генератор - двигатель, Г-Д), тиристного преобразователя (система управляемый кремниевый выпрямитель — двигатель, КУВ — Д) и др.
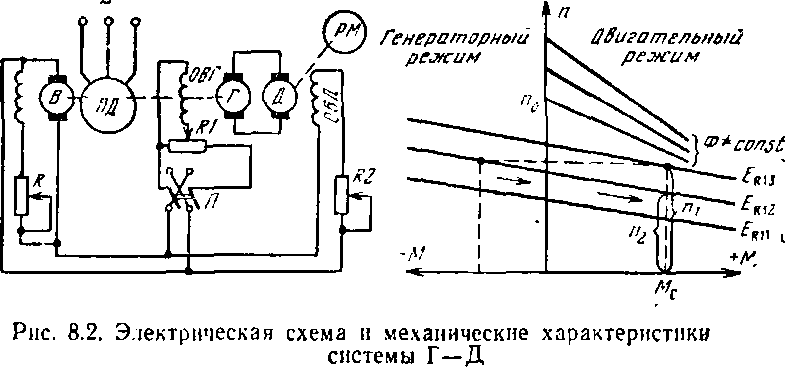
Схема простейшей системы Г — Д и ее характеристики приведены на рис. 8.2.
Приводной двигатель ПД (синхронный или асинхронный) вращает с постоянной частотой якоря генератора Г и возбудителя В. От возбудителя В питаются обмотки возбуждения двигателя ОВД и генератора ОВГ. Генератор подает напряжение непосредственно на якорь двигателя Д, который приводит в движение машину РМ.
Регулирование частоты вращения двигателя Д производится за счет изменения величины напряжения на зажимах якоря. Изменение величины напряжения достигается изменением величины магнитного потока генератора Г с помощью реостата С помощью переключателя П возможно изменение направления магнитного потока возбуждения генератора Г, а значит полярности подаваемого на двигатель напряжения. Так достигается реверсирование двигателя Д.
Известно, что при изменении величины напряжения Е2 можно получить любое количество искусственных характеристик двигателя Д.
Изменяя величину сопротивления R2 в обмотке возбуждения двигателя, получаем изменение величины магнитного потока Ф двигателя. В этом случае характеристики располагаются выше естественной характеристики двигателя, т. е. частота вращения двигателя регулируется и в сторону увеличения ее по сравнению с номинальной.

Система Г — Д и ее варианты применяются для привода подъемных машин, экскаваторов, прокатных станов и др. Не недостатки: высокая первоначальная стоимость, относительно низкий к. п. д. и громоздкость.
Для привода горных машин получила применение система КУВ — Д. В этой
системе источником питания двигателя служит кремниевый управляемый вентиль
- тиристор. Изменение напряжения на зажимах якоря осуществляется путем изменения времени открывания тиристора.
На схеме (рис. 8.3, а) изображены двигатель постоянного тока Д с обмоткой независимого возбуждения ОВД, трансформатор Тр, группа тиристоров Т, блок управления ими БУ. График изменения средней величины напряжения ия на зажимах двигателя приведен на рис. 8.3, б.
Регулирование напряжения на зажимах якоря осуществляется путем изменения продолжительности пребывания тиристоров Т в закрытом состоянии Сигнал на открытие тиристора в проводящем направлении подается регулируемым блоком управления БУ.
При включении трансформатора Тр напряжение подается на аноды тиристоров. Когда на анод поступает отрицательная полуволна напряжения, тиристор закрыт. Во время подачи положительной полуволны тиристор будет закрыт еще некоторое время t1, пока с блока БУ не поступит сигнала на открывание его.
С момента подачи сигнала тиристор будет пропускать ток в течение времени t2, а затем снова закроется. Так будет происходить каждую положительную полуволну.
Изменение продолжительности нахождения тиристоров в открытом состоянии вызывает изменение среднего значения выпрямленного напряжения подаваемого на зажимы якоря, благодаря чему возможно плавное регулирование частоты вращения электродвигателя.
Так как тиристоры имеют малые габариты и массу при большой мощности, высокий к. п. д., большой срок службы, в них отсутствуют движущиеся и нормально искрящие части, они получают все большее применение в электроприводе рудничных машин. Так, например, система КУВ — Д уже нашла применение в приводе горных комбайнов.
Самостоятельная работа №5
на тему : «Особенности эксплуатации и конструктивного исполнения рудничного электрооборудования»
Студента гр. Р-2-10
Мартынова В.А.
Дата добавления: 2015-04-16; просмотров: 227; Мы поможем в написании вашей работы!; Нарушение авторских прав |