КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Введение. По дисциплине Теория автоматического управления
Курсовая РАБОТА
По дисциплине Теория автоматического управления
На тему:«Синтез автоматической системы стабилизации давления
в теплообменнике охлаждения пирогаза».
Выполнил – студент группы АТП-12: _____________.
Руководитель курсовой работы: Стафейчук Б. Г.
Пермь, 2014
Содержание
Введение. 4
1. Выбор периода квантования. 5
2. Получение Z-передаточной функции объекта. 6
3. Получение разностного уравнения объекта регулирования и построение временных характеристик в аналоговой и дискретной форме. 7
3.1 Получение разностного уравнения объекта регулирования. 7
3.2 Временные характеристики непрерывного и дискретного объекта. 7
4. Сравнение КЧХ непрерывного и дискретного объекта. 9
5. Расчет настроек непрерывного и дискретного ПИ-регуляторов. 11
5.1. Расчет настроек непрерывного ПИ-регулятора. 11
5.2. Расчет настроек дискретного ПИ-регулятора методом теории дискретных систем.. 14
6. Модель системы управления в среде MATLAB.. 19
Вывод. 21
Список литературы.. 22
Приложение. 23
Введение
Управление техническим объектом обычно состоит в выработке команд, реализация которых обеспечивает целенаправленное изменение состояния этого объекта при соблюдении заранее обусловленных требований и ограничений.
Состояние объекта в отношении цели управления определяется текущими значениями некоторого числа контролируемых переменных, получивших название управляемых величин объекта.
Воздействия, получаемые объектом со стороны внешней среды и приводящие к нежелательным отклонениям управляемых величин, называют возмущающими воздействиями, или возмущениями.
Изменение управляемых величин в соответствии с целью управления (и в частности, поддержание их на неизменном уровне) осуществляется подачей на объект специально организуемых управляющих воздействий.
Для возможности реализации этих управляющих воздействий всякий объект снабжается специально предусмотренными для этой цели управляющими органами.
Управление, осуществляемое без участия человека, называют автоматическим, а техническое устройство, выполняющее в этом случае функции управления, — автоматическим управляющим устройством или контроллером; объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления.
Управление называется непрерывным, если осуществляемое контроллером изменение управляющего воздействия происходит в непрерывной зависимости от изменения задающего воздействия и управляемой величины (а возможно, и от производных и интегралов от этих изменений). В случае дискретного управления управляющее воздействие принимает лишь какое-нибудь одно из нескольких возможных значений (в пределе — только из двух возможных значений).
Как правило, из общей задачи управления выделяется задача устранения (или, по крайней мере, сведения к допустимому минимуму) вредного влияния на достижение цели управления действующих на объект неконтролируемых возмущений, а также неконтролируемых погрешностей в задании модели объекта, т. е. задача, которая в структуре замкнутой системы управления решается на основе рабочей информации, получаемой контроллером по каналу обратной связи. Это относительно самостоятельная часть задачи управления получила название задачи регулирования объекта, а часть системы управления, выполняющая эту задачу, - подсистемы регулирования.
1. Выбор периода квантования
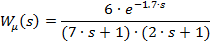
Передаточная функция объекта управления по каналу регулирующего воздействия имеет вид:

Определим корни характеристического уравнения:


Преобразуем знаменатель передаточной функции к следующему виду:


В результате получим:

Из теоремы Котельникова:

Сделаем замену: 
Получим уравнение:
 корни которого:
корни которого:


Так как один корень отрицательный, то  и
и  .
.

Находим период квантования:


Для того чтобы в дальнейшем при получении Z-передаточной функции дискретного объекта регулирования можно было использовать обычное (а не модифицированное) Z – преобразование, следует изменить время запаздывания непрерывного объекта так, чтобы это время было бы равно целому числу периодов квантования.
Время запаздывания непрерывного объекта меняем с  на
на  .
.
В результате передаточная функция объекта управления будет иметь вид:
Дата добавления: 2015-01-14; просмотров: 338; Мы поможем в написании вашей работы!; Нарушение авторских прав |