КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Расчет настроек дискретного ПИ-регулятора методом теории дискретных систем
Произведем расчет настроек цифрового ПИ-регулятора в программе Linreg, для этого введем в соответствующие поля данные объекта управления, время запаздывания, коэффициент передачи, степень затухания и период квантования.
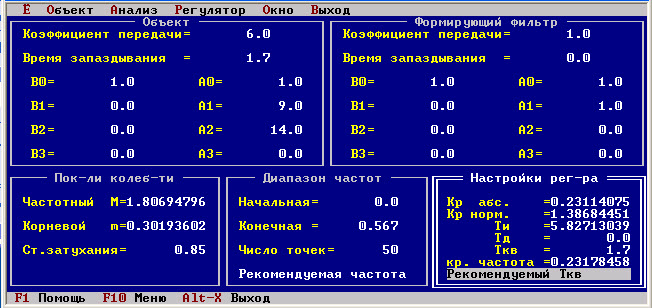
Рис.6. Интерфейс программы Linreg при расчете настроек цифрового ПИ-регулятора дискретного объекта.
Полученные значения настроек ПИ-регулятора:



Для определения оптимальных настроек цифрового ПИ-регулятора графо-аналитически методом теории дискретных систем используем построение на миллиметровой бумаге (см. приложение Рис.15), в котором:
Проводим из начала координат луч под углом  .
.
– угол, характеризующий запас устойчивости системы.

Для точек КЧХ дискретного объекта, попадающих в III квадрант определяем расстояние  от начала координат.
от начала координат.
К отрезку добавляется отрезок  , характеризующий увеличение вещественной составляющей цифрового регулятора на
, характеризующий увеличение вещественной составляющей цифрового регулятора на  . рассчитываем по формуле:
. рассчитываем по формуле:
Перпендикулярно  откладываем расстояние
откладываем расстояние  и получаем КЧХ разомкнутой системы с цифровым ПИ-регулятором с известным значением
и получаем КЧХ разомкнутой системы с цифровым ПИ-регулятором с известным значением  .
.
рассчитываем по формуле:

Далее определяем радиус  окружности, которая будет одновременно касаться КЧХ разомкнутой системы и луча, определяющего запас устойчивости.
окружности, которая будет одновременно касаться КЧХ разомкнутой системы и луча, определяющего запас устойчивости.
Параметр  настройки регулятора определяем по формуле:
настройки регулятора определяем по формуле:
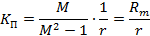
Параметр определяется для каждого выбранного значения .
В таблице 4 приведены результаты расчета:
Таблица 4. Значения рассчитанных параметров 

| 
| 
| 
| 
| 
| 
| 
| 
| 
|
| 0.19 | -0.676 | -3.288 | 2.974 | 0.634 | 0.571 | 0.519 | 0.476 | 0.439 | |
| 0.21 | -1.020 | -2.923 | 2.859 | 0.585 | 0.526 | 0.478 | 0.439 | 0.405 | |
| 0.220 | -1.157 | -2.740 | 2.643 | 0.562 | 0.506 | 0.460 | 0.421 | 0.389 | |
| 0.230 | -1.273 | -2.559 | 2.448 | 0.540 | 0.486 | 0.442 | 0.405 | 0.374 | |
| 0.250 | -1.452 | -2.209 | 2.271 | 0.499 | 0.449 | 0.409 | 0.374 | 0.346 | |
| 0.270 | -1.571 | -1.878 | 2.110 | 0.462 | 0.416 | 0.378 | 0.347 | 0.320 | |
| 0.290 | -1.640 | -1.571 | 1.964 | 0.429 | 0.386 | 0.351 | 0.322 | 0.297 | |
| 0.310 | -1.670 | -1.290 | 1.831 | 0.399 | 0.359 | 0.326 | 0.299 | 0.276 | |
| 0.330 | -1.669 | -1.036 | 1.709 | 0.371 | 0.334 | 0.304 | 0.278 | 0.257 | |
| 0.350 | -1.644 | -0.807 | 1.598 | 0.346 | 0.311 | 0.283 | 0.259 | 0.239 | |
| 0.370 | -1.600 | -0.602 | 1.496 | 0.323 | 0.291 | 0.264 | 0.242 | 0.224 | |
| 0.390 | -1.542 | -0.421 | 1.627 | 0.302 | 0.272 | 0.247 | 0.226 | 0.209 | |
| 0.410 | -1.473 | -0.261 | 1.527 | 0.283 | 0.254 | 0.231 | 0.212 | 0.196 |
Для удобства нанесения на миллиметровую бумагу введем масштабный коэффициент:

Полученные значения с учетом масштаба приведены в таблице 5.
Таблица 5. Значения рассчитанных параметров в см.
|
|
|
|
|
|
|
|
|
|
|
| 0.19 | -3.4 | -16.4 | 16.8 | 3.2 | 2.9 | 2.6 | 2.4 | 2.2 | |
| 0.21 | -5.1 | -14.6 | 15.5 | 2.9 | 2.6 | 2.4 | 2.2 | 2.0 | |
| 0.220 | -5.8 | -13.7 | 14.9 | 2.8 | 2.5 | 2.3 | 2.1 | 1.9 | |
| 0.230 | -6.4 | -12.8 | 14.3 | 2.7 | 2.4 | 2.2 | 2.0 | 1.9 | |
| 0.250 | -7.3 | -11.0 | 13.2 | 2.5 | 2.2 | 2.0 | 1.9 | 1.7 | |
| 0.270 | -7.9 | -9.4 | 12.2 | 2.3 | 2.1 | 1.9 | 1.7 | 1.6 | |
| 0.290 | -8.2 | -7.9 | 11.4 | 2.1 | 1.9 | 1.8 | 1.6 | 1.5 | |
| 0.310 | -8.4 | -6.5 | 10.6 | 2.0 | 1.8 | 1.6 | 1.5 | 1.4 | |
| 0.330 | -8.3 | -5.2 | 9.8 | 1.9 | 1.7 | 1.5 | 1.4 | 1.3 | |
| 0.350 | -8.2 | -4.0 | 9.2 | 1.7 | 1.6 | 1.4 | 1.3 | 1.2 | |
| 0.370 | -8.0 | -3.0 | 8.5 | 1.6 | 1.5 | 1.3 | 1.2 | 1.1 | |
| 0.390 | -7.7 | -2.1 | 8.0 | 1.5 | 1.4 | 1.2 | 1.1 | 1.0 | |
| 0.410 | -7.4 | -1.3 | 7.5 | 1.4 | 1.3 | 1.2 | 1.1 | 1.0 |
Рассчитанные значения отрезка приведены в таблице 6 и в таблице 7.
Таблица 6. Значения рассчитанных параметров 
|
|
|
|
| 
|
|
|
|
|
|
| 0.19 | -0.676 | -3.288 | 2.974 | 3.926 | 3.533 | 3.212 | 2.944 | 2.718 | |
| 0.21 | -1.020 | -2.923 | 2.859 | 3.276 | 2.948 | 2.680 | 2.457 | 2.268 | |
| 0.220 | -1.157 | -2.740 | 2.643 | 3.004 | 2.704 | 2.458 | 2.253 | 2.080 | |
| 0.230 | -1.273 | -2.559 | 2.448 | 2.762 | 2.486 | 2.260 | 2.071 | 1.912 | |
| 0.250 | -1.452 | -2.209 | 2.271 | 2.350 | 2.115 | 1.922 | 1.762 | 1.627 | |
| 0.270 | -1.571 | -1.878 | 2.110 | 2.015 | 1.814 | 1.649 | 1.511 | 1.395 | |
| 0.290 | -1.640 | -1.571 | 1.964 | 1.740 | 1.566 | 1.424 | 1.305 | 1.205 | |
| 0.310 | -1.670 | -1.290 | 1.831 | 1.513 | 1.362 | 1.238 | 1.135 | 1.047 | |
| 0.330 | -1.669 | -1.036 | 1.709 | 1.323 | 1.190 | 1.082 | 0.992 | 0.916 | |
| 0.350 | -1.644 | -0.807 | 1.598 | 1.163 | 1.046 | 0.951 | 0.872 | 0.805 | |
| 0.370 | -1.600 | -0.602 | 1.496 | 1.027 | 0.924 | 0.840 | 0.770 | 0.711 | |
| 0.390 | -1.542 | -0.421 | 1.627 | 0.911 | 0.820 | 0.745 | 0.683 | 0.630 | |
| 0.410 | -1.473 | -0.261 | 1.527 | 0.811 | 0.730 | 0.664 | 0.608 | 0.561 |
Таблица 7. Значения рассчитанных параметров в см.
|
|
|
|
|
|
|
|
|
|
|
| 0.19 | -3.4 | -16.4 | 16.8 | 19.6 | 17.7 | 16.1 | 14.7 | 13.6 | |
| 0.21 | -5.1 | -14.6 | 15.5 | 16.4 | 14.7 | 13.4 | 12.3 | 11.3 | |
| 0.220 | -5.8 | -13.7 | 14.9 | 15.0 | 13.5 | 12.3 | 11.3 | 10.4 | |
| 0.230 | -6.4 | -12.8 | 14.3 | 13.8 | 12.4 | 11.3 | 10.4 | 9.6 | |
| 0.250 | -7.3 | -11.0 | 13.2 | 11.7 | 10.6 | 9.6 | 8.8 | 8.1 | |
| 0.270 | -7.9 | -9.4 | 12.2 | 10.1 | 9.1 | 8.2 | 7.6 | 7.0 | |
| 0.290 | -8.2 | -7.9 | 11.4 | 8.7 | 7.8 | 7.1 | 6.5 | 6.0 | |
| 0.310 | -8.4 | -6.5 | 10.6 | 7.6 | 6.8 | 6.2 | 5.7 | 5.2 | |
| 0.330 | -8.3 | -5.2 | 9.8 | 6.6 | 6.0 | 5.4 | 5.0 | 4.6 | |
| 0.350 | -8.2 | -4.0 | 9.2 | 5.8 | 5.2 | 4.8 | 4.4 | 4.0 | |
| 0.370 | -8.0 | -3.0 | 8.5 | 5.1 | 4.6 | 4.2 | 3.8 | 3.6 | |
| 0.390 | -7.7 | -2.1 | 8.0 | 4.6 | 4.1 | 3.7 | 3.4 | 3.2 | |
| 0.410 | -7.4 | -1.3 | 7.5 | 4.1 | 3.6 | 3.3 | 3.0 | 2.8 |
Измеряя радиусы полученных окружностей (см. приложение Рис.15) определили значения . Результаты предоставлены в таблице 8.
Таблица 8. Определение параметра  регулятора дискретного объекта
регулятора дискретного объекта

| 
| 
| 
| 
| 
|
| 0.79775 | 22.95 | 4.590 | 0.1738 | 4.50 | 0.03862 |
| 0.79775 | 20.34 | 4.068 | 0.1961 | 5.00 | 0.03922 |
| 0.79775 | 18.36 | 3.672 | 0.2173 | 5.50 | 0.03950 |
| 0.79775 | 16.9 | 3.380 | 0.2360 | 6.00 | 0.03934 |
| 0.79775 | 15.8 | 3.160 | 0.2525 | 6.50 | 0.03884 |
| Настройки ПИ-регулятора, полученные в Linreg: | 0.23114 | 5.83 | 0.03967 |
Для определения оптимальных настроек ПИ-регулятора построим графики зависимостей  и
и  см. Рис.7 и Рис.8.
см. Рис.7 и Рис.8.
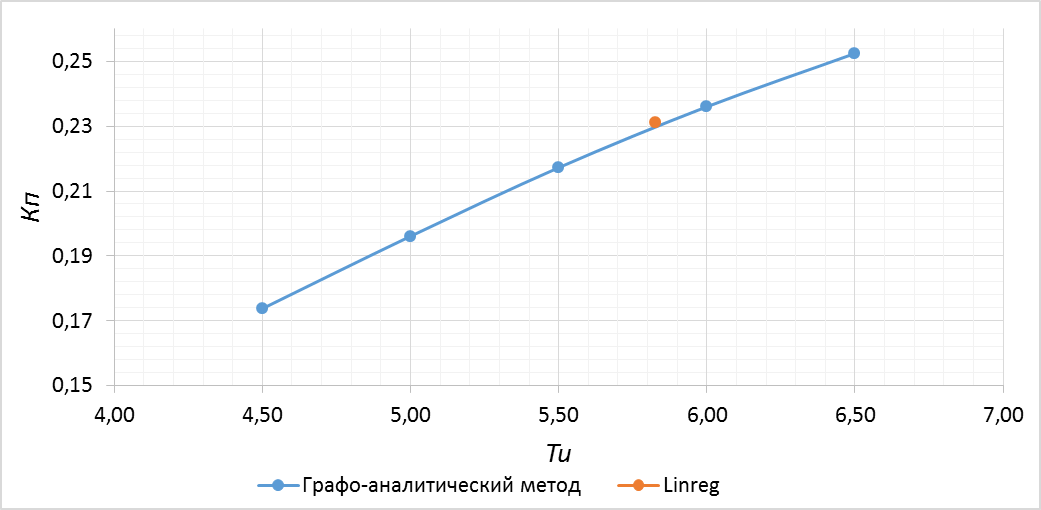
Рис.7. Зависимости Кп от Ти (для непрерывного объекта).
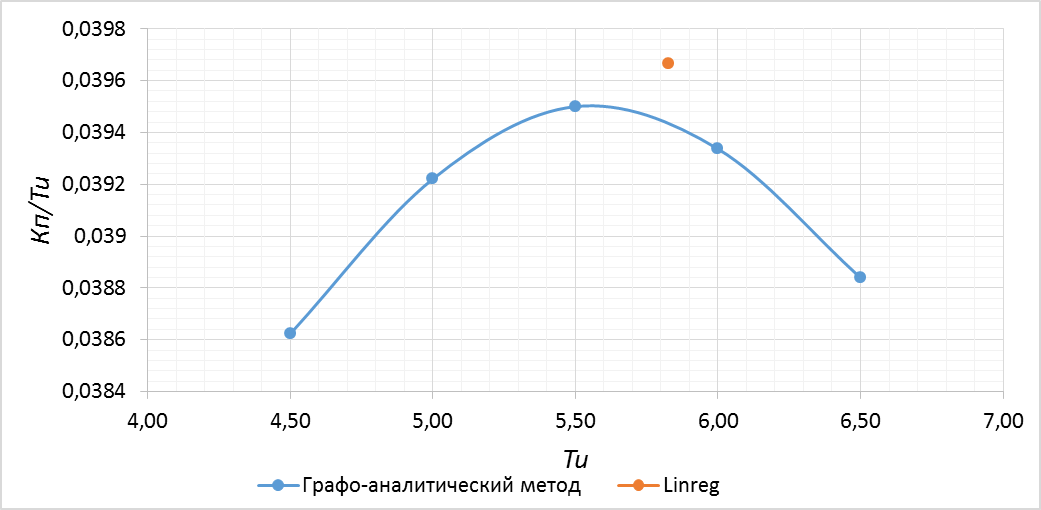
Рис.8. Зависимости Кп/Ти от Ти (для непрерывного объекта).
По рис.4, рис.5 и рис.7, рис.8 находим оптимальные настройки непрерывного и цифрового ПИ – регуляторов. Сведем данные в таблицу 8.
Таблица 8. Определение параметра регулятора дискретного объекта
| Регулятор | Параметр | Расчетные данные | Linreg |
| Непрерывный |
| 0.29711 | 0.29857 |
|
| 5.50 | 5.55 | |
|
| 0.05402 | 0.0538 | |
| Цифровой |
| 0.2173 | 0.23114 |
|
| 5.50 | 5.83 | |
|
| 0.03950 | 0.03967 |
Расчетные данные совпадают с настройками ПИ-регулятора в программе Linreg.
Для дальнейших расчетов будем использовать настройки, полученные в программе Linreg, т.к. они более точные.
Дата добавления: 2015-01-14; просмотров: 324; Мы поможем в написании вашей работы!; Нарушение авторских прав |