КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Классификация СИФУ. Функциональная схема канала СИФУ. Назначение отдельных элементов
Классификация СИФУ.
СИФУ можно разделить на два класса:
- Синхронные системы управления - каждый управляющий импульс жестко привязан к синусоиде своей фазы.
- t сети. Он получается как результат регулирования интервалов между импульсами управления.w в явном виде не связан с координатой aАсинхронные СИФУ - угол управления
Синхронные СИФУ делятся на два вида:
- Многоканальные СИФУ;

Синхронизирующее устройство посылает в СИФУ “n” синхронизирующих сигналов в моменты равенства ЭДС фаз, коммутация которых должна быть выполнена данным вентилем.
Кроме сигнала синхронизирующего устройства на вход всех ФСУ поступает аналоговый сигнал UУ во всех ФСУ должен быть одинаков, поэтому и сигнал управления (Ua). Угол a, величина которого определяет угол задержки включения всех вентилей (У) на каждом канале один и тот же.
- Одноканальные СИФУ.
В отличие от многоканальной здесь фазовый сдвиг осуществляется одним фазосдвигающим устройством, выходной сигнал которого поступает на распределитель импульсов в виде кратковременного импульса, частота поступления которого- 50 Гц.
импульсов, поступающих на выходные устройства, где эти импульсы усиливаются и поступают на управляющие электроды тиристоров. В течение одного периода переменного напряжения распределитель импульсов успевает выдать шесть импульсов на выходные устройства и т.о. завершается один цикл включения тиристоров.°Распределитель импульсов выдает шесть сдвинутых по фазе на 60
Основные узлы многоканальной СИФУ.
Синхронизирующие устройства (СУ) – определяет момент естественной коммутации и посылает сигнал в фазосдвигающее устройство.
^ Фазосдвигающее устройство (ФСУ) - регулирование фазы включающих импульсов тиристоров.
Входные устройства СИФУ ТП - сформировать аналоговый сигнал управления (UУ ), учитывающий задающее воздействие, воздействие сигналов обратных связей, корректирующее воздействие.
Выходные устройства СИФУ ТП. (формирователи импульсов) – формирование управляющего импульса, его усиление и осуществление гальванической развязки системы управления.
21 Вертикальный и интегральный принципы фазосмещения в СИФУ ТП. Способ обеспечения линейной зависимости  .
.
Сущность вертикального фазового управления заключается в сравнении переменного напряжения (пилообразной, синусоидальной, треугольной и других форм) с постоянным напряжением регулируемой величины.
Основными узлами его являются:
- генератор пилообразного напряжения (ГПН) синхронизированный с синусоидальным питающим напряжением с помощью СУ,
- нуль-орган НО (компаратор) и источник регулируемого постоянного напряжения, величина которого UУ регулируется вручную или автоматически.
В этой схеме формирование включающего импульса происходит в момент равенства пилообразного напряжения генератора Uг и напряжения управления UУ. При изменении UУ изменяется фаза управляющего импульса. Функции сравнивающего устройства выполняет нуль- орган “НО”, на входы которого поступают напряжения UУ и Uг.
Недостатком этого ГПН является нелинейность характеристики “вход-выход” тиристорного преобразователя. Эта нелинейность обусловлена нелинейной зависимостью Ed (U¦ = a). При линейном пилообразном напряжении сохраняется линейная зависимость a(¦= У ), но зависимость выходной ЭДС от UУ остается нелинейной.
Иногда указанная нелинейность компенсируется за счет нелинейности опорного напряжения (переменное напряжение, которое сравнивается по величине с UУ ). Чаще всего в качестве опорного напряжения используется часть синусоиды напряжения питания ТП, а именно ее косинусоидальная часть.

На рис 35 изображена диаграмма напряжения трехфазного нулевого ТП, а также, диаграмма напряжений при формировании управляющих импульсов. При этом, в качестве опорного напряжения использована косинусоидальная часть переменного напряжения не участвующей в коммутации фазы. Так, при коммутации фаз “a”-“b” опорным напряжением является “перевернутая” фаза “c”; при коммутации фаз “b”-“c”, опорное напряжение- “перевернутая” фаза “а” и т.д.
от UaВ соответствии с диаграммой, зависимость угла У = arccos Ua- арккосинусоидальная (У ), зависимость Ud - косинусоидальная (Uaот d = Ud0 ). Зависимость же Uacos d (U¦= У ), вследствие того, что одна нелинейность компенсирует другую, оказывается линейной. Это показано на рис 36:

Достоинства описанной системы очевидны. Линейность характеристики вход-выход тиристорного преобразователя существенно облегчает включение его в систему автоматического регулирования координат электропривода.
Интегральный принцип фазосмещения управляющих импульсов ТП.
Сущность этого принципа фазосмещения можно прояснить, рассмотрев структурную схему, изображенную на рис 37:

В схему входят следующие элементы:
- Синхронизирующее устройство(СУ);
- Регулятор тока (РТ), обеспечивающий ток заряда интегрирующей емкости (си), значение которого определяется величиной управляющего напряжения UУ ;
- Пороговый элемент (ПЭ) срабатывает при достижении потенциала заряда емкости (си ) порогового значения. При срабатывании ПЭ емкость разряжается через него на выходное устройство (Вых.У), которое формирует управляющий импульс на тиристор.
Схема работает следующим образом:
В моменты естественной коммутации СУ посылает сигнал (импульсы) на РТ. Начиная с момента естественной коммутации РТ обеспечивает заданное значение тока заряда емкости си ”. Дальше схема работает так, как сказано выше.a. Время накопления заряда на емкости до величины потенциала срабатывания порогового элемента- это время задержки подачи управляющего импульса на управляющий электрод тиристора. Оно определяет величину угла управления “
” на заданном значении.aДостоинством схем с интегральным принципом фазосмещения является их простота и надежность. Их недостаток- более низкая точность поддержания величины угла “
^ 22 Основные узлы СИФУ. Принципы их функционирования.
Синхронизирующие устройства (СУ).
СУ – определяет момент естественной коммутации и посылает сигнал в фазосдвигающее устройство.
Простейшим, наиболее распространенным СУ-ом является трансформатор. В качестве примера рассмотрим СУ, которое используется в системах управления 3-х фазных мостовых преобразователей. Схема этого устройства, представляющего собой трансформатор, на первичную обмотку которого подается трехфазное напряжение сети:

/3. Вторичные обмотки синхронизирующего устройства выполнены со средней точкой, причем, эта точка соединяет начало и конец каждой полуобмотки. Поэтому со вторичных обмоток снимается шестифазное напряжение, векторная диаграмма которого представлена на том же рисунке. Схема позволяет использовать как фазные, так и лpВ соответствии с принципом действия 3-х фазного мостового ТП на его тиристоры при шестиканальной системе управления должны поступать включающие импульсы, сдвинутые друг относительно друга на угол инейные напряжения вторичных обмоток синхронизирующего устройства.
Схема позволяет использовать как фазные, так и линейные напряжения вторичных обмоток синхронизирующего устройства.
Так точке естественной коммутации линейных напряжений “ау” и “az” (1) соответствует переход через нулевое значение напряжения “bz” (2).
. Т.о. синхронизирующее устройство определяет момент естественной коммутации и в это время посылает сигнал в ФСУ.aЭтот переход может быть легко зафиксирован с помощью вентильного элемента и, значит, в этот момент может быть послан импульс в фазосдвигающее устройство, которое, с этого момента начинает отсчет угла
Фазосдвигающее устройство (ФСУ).
Назначение ФСУ в СИФУ ТП - регулирование фазы включающих импульсов тиристоров. Возможны различные принципы их реализации, но неизменным является то, что ФСУ осуществляет сдвиг импульса относительно момента естеств, величина которого регулируется в зависимости от значения управляющего напряжения Uaенной коммутации в сторону запаздывания на угол У. Два принципа фазосмещения, нашедших распространение в реальных ТП. Один из них называется вертикальный, другой- интегральный принципы.
Входные устройства СИФУ ТП.
Назначение входного устройства - сформировать аналоговый сигнал управления (UУ ) на СИФУ ТП, учитывающий задающее воздействие, воздействие сигналов обратных связей, корректирующее воздействие. Для реализации возложенных на входное устройство (ВУ) функций необходимо осуществить:
- Фильтрацию всех поступающих сигналов;
- Выполнить все необходимые логические действия с поступившими сигналами (суммирование с учетом их знаков, интегрирование тех сигналов, воздействие которых должно определяться их средними значениями);
- Усиление результирующего сигнала;
- Ограничение UУ допустимыми минимальными и максимальными значениями.
Каждая из перечисленных функций выполняется, обычно, своим, специальным, предназначенным для этого устройством, схемная и элементная реализация которого может иметь массу вариантов. Рассматривать эти варианты нецелесообразно, но некоторые тенденции в реализации этих устройств можно отметить:
- Так как мощности поступающих сигналов малы, в качестве фильтров обычно используют пассивные однозвенные R-C фильтры - Г- образные и П - образные;
- Функция суммирования реализуется обычно сумматором, выполненном на операционном усилителе, например, по схеме приведенной на рис 38:
- Усиление результирующего сигнала выполняется усилителем постоянного тока, выполненным на транзисторах либо на операционных усилителях.

- Ограничение UУ сверху и снизу может быть реализовано с помощью кремниевых стабилитронов.
Выходные устройства СИФУ ТП. (формирователи импульсов).
Обычно в системах управления операции формирования импульсов, их усиления и гальванической развязки с системой управления осуществляются одним узлом, который, в дальнейшем, именуется “выходным устройством” (Вых.У). В других литературных источниках они именуются “формирователями импульсов” (ФИ).
Примером может служить устройство, схема которого представлена на рис 39:
Оно состоит из:
- выходного транзистора VT;
- импульсного трансформатора (Тр- И), со вторичной обмотки которого снимаются импульсы, поступающие на управляющий электрод тиристора.
Существенное влияние на параметры включающего импульса в формирователе импульсов (ФИ) оказывает импульсный трансформатор. В схеме для интенсивного нарастания тока в первичной обмотке трансформатора в момент формирования импульса введена дополнительная вторичная обмотка трансформатора, включенная в цепь управления (2).
Для предотвращения утечки тока через выходную цепь (Э-К) транзистора и намагничивания сердечника трансформатора этими токами утечки в промежутках между рабочими импульсами, предусмотрен источник запирающей ЭДС (Eзапир.), который запирая транзистор в промежутках между рабочими импульсами, предотвращает подмагничивание сердечника, но не препятствует четкому включению транзистора VT при создании условий для прохождения iвкл.
Диод VD2 , установленный параллельно первичной обмотке трансформатора, затягивает процесс размагничивания импульсного трансформатора в промежутках между рабочими импульсами и, этим самым, защищает транзистор VT от пробоя импульсом перенапряжения, который возник бы при отсутствии VD2 .
23 Способы реверса вентильных электроприводов.
Реверс – это или изменение направления вращения механизма на противоположенное, или изменение момента вращения с прямого на обратный при неизменном направлении вращения.
Схемы реверсивного вентильного электропривода можно разбить на две основные группы:
- Схемы с одним комплектом вентилей и переключениями в цепи якоря;
“-”
- медленно работает
- броски тока при переключениях
- сложность регулирования скорости эл.привода
- износ реверсивных контакторов
“+”
- простота
- дешевизна
- Схемы бесконтактного реверса с двумя комплектами вентелей.
Бесконтактные реверсивные схемы с двухкомплектными ТП.
Применяются в тех случаях, когда требуются предельно быстрые реверсы и большая частота последних и нужны плавные и быстрые переходы с высших скоростей на низшие. РТП обеспечивают более плавный переход из двигательного режима в тормозной.
Схемы реверсивных вентильных электроприводов с двумя комплектами вентилей делятся на два основных класса:
- перекрестные схемы (или восьмерочные);
- встречно- параллельные (противопараллельные).
В перекрестных схемах силовой трансформатор (Тр) имеет две изолированные группы вторичных обмоток, каждая из которых питает свою группу вентилей: ТПВ и ТПН.

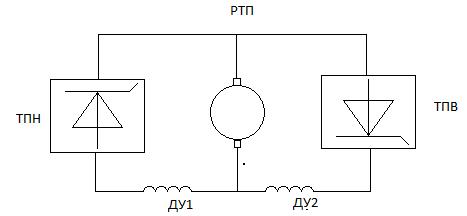
 Встречно-параллельные или противо-параллельные схемы (рис 44, 45) - имеют одну группу вторичных обмоток питающего трансформатора.
Встречно-параллельные или противо-параллельные схемы (рис 44, 45) - имеют одну группу вторичных обмоток питающего трансформатора.

Сравнивая перекрестные и встречно- параллельные схемы, можно отметить достоинства и недостатки каждого из этих классов.
Недостатком перекрестных схем является необходимость иметь более дорогой и хуже используемый трансформатор с двумя комплектами вторичных обмоток.
Достоинство- меньшее число уравнительных дросселей в трехфазной мостовой схеме (наиболее распространенной в вентильном электроприводе) и меньшая их индуктивность.
Во встречно- параллельных схемах размер и стоимость трансформатора меньше, т.к. требуется только одна вторичная обмотка. Более того, при применении противопараллельных схем можно вовсе обойтись без трансформатора, если уровень напряжения сети переменного тока соответствует потребной величине выпрямленного напряжения. Правда, в этом случае возможно превышение критического значения нарастания анодного тока в вентилях. Поэтому приходится устанавливать в двух фазах воздушные реакторы. Для их изготовления требуется большое количество меди, что, в какой-то степени, снижает преимущество этих схем.
Недостатком встречно- параллельных схем являются большие значения переменной ЭДС в контуре уравнительного тока, из-за чего приходится увеличивать индуктивность уравнительных дросселей, и следовательно, габариты, массу и стоимость последних.
В схемах с двумя комплектами вентилей при одном направлении вращения в выпрямительном режиме работает одна группа вентилей, а при противоположном- другая. При этом, в то время как одна группа вентилей работает в выпрямительном режиме, другая подготовлена к режиму инвертирования.
Процесс реверса может проходить двумя разными способами:
- без запирания неработающей группы(совместное управление);
- с запиранием неработающей группы(раздельное управление).
24 Совместное управление комплектами реверсивных ТП. Природа уравнительных токов.
Системы с совместным управлением подразделяются на два типа:
- aСистемы с одноканальным управлением, или системы с жестким однозначным согласованием углов управления реверсивных групп 1 aи 2;
- Системы с двухканальным управлением, или системы с автоматическим регулированием уравнительного тока.
aВ одноканальных системах имеется лишь один канал управления, по которому осуществляется одновременное воздействие на углы управления обеих вентильных групп. При этом обеспечивается однозначное жесткое соответствие между углами управления 1 aи 2 aгрупп, т.е. каждому значению угла управления первой группы 1 aсоответствует строго определенное значение угла управления другой группы 2a. Соотношение между углами 1 aи 2 определяется принятым законом согласования, характеристиками системы управления и ее настройкой.
В двухканальных системах имеются два отдельных канала управления. Один из каналов воздействует на работающую группу вентилей и тем самым определяет основной режим работы электропривода. Второй канал управления воздействует на неработающую группу вентилей и служит для регулирования величины уравнительного тока. Поэтому двухканальные системы управления называют также системами с автоматическим регулированием уравнительного тока.
Из-за равенства средних значений ЭДС выпрямительной и инверторной групп при линейном (симметричном) согласовании постоянная составляющая выпрямленной ЭДС в уравнительном контуре равна нулю. Однако, сумма мгновенных значений ЭДС в этом контуре не равна нулю и вызывает протекание уравнительного тока. Последний имеет пульсирующий характер.
25 Согласование статических характеристик реверсивных групп
Безлюфтовое согласование
wДля обеспечения безлюфтового перехода из двигательного режима в тормозной (генераторный) необходимо, чтобы скорость холостого хода двигателя при подходе к ней со стороны двигательного режима х.х.дв. wравнялась скорости холостого хода при подходе к ней со стороны тормозного режима х.х.т :
wх.х.дв w= х.х.т
wТак как х.х.дв = Ud вх./ ce
wх.х.т = Ud их./ ce
где: Ud вх - напряжение холостого хода выпрямительной группы;
Ud их - напряжение холостого хода инверторной группы.
Из соотношений и следует, что для получения безлюфтового сопряжения характеристик необходимо, чтобы напряжения холостого хода выпрямительной и инверторной групп были равны по величине. Если не учитывать области прерывистого тока, т.е. считать индуктивность в якорной цепи двигателя бесконечно большой, то для равенства
Ud их = Ud вх
должно выполняться условие:
Ed0 acos b Ud- в = - Ed0 acos и Ud+ В (3- 29)

aИз этого условия находится связь между углами управления выпрямительной (Вa) и инверторной (и) групп вентилей:
acos В a+ cos и Ud= (2В / Ed0 e) = 2
или:
acos В a= - cos и b = cos e+ 2и (3-30)e+ 2
Ud = eгде В / Ed0
-относительное падение напряжения на вентиле.
, получается:a - p = bИз соотношения (3- 30) с учетом того, что
acos ½Вacos ½ >½иb= cos ½и b; или и > aВ (3- 32)
aи В a+ и < a ; или °1801 a+ 2 < (3- 33)°180
(3-33) называют нелинейным (несимметричным) согласованием без люфта.¸Согласование характеристик выпрямительной и инверторной групп в соответствии с условиями (3-27)
Линейное (симметричное) согласование.
На практике довольно часто применяется так называемое линейное или симметричное согласование работы реверсивных групп в соответствии с законом:
a1 a+ 2 °= 180
aили 1 b= 2
Здесь в соответствии с ЭДС выпрямительной группы равна ЭДС инверторной группы:
Ed в = Ed и
и постоянная составляющая выпрямленного напряжения в уравнительном контуре равна нулю.
Из-за наличия падения напряжения в вентилях напряжения холостого хода выпрямителя UdВ и инвертора UdИ при данном способе согласования оказываются уже неравными:
UdВ = Ed0 acos В Ud- В < Ed0 bcos и Ud+ В = UdИ
wВследствие этого скорость идеального холостого хода в двигательном режиме х.х.дв wоказывается меньше скорости идеального холостого хода в режиме рекуперативного торможения х.х.т :
wх.х.дв=UdВ / ce = (Ed0 acos В Ud- В )/ce < (Ed0 bcos и Ud+ В )/ce = UdИ / cew=х.х.т *
и механические характеристики привода имеют вид, показанный на рис 48:

.wdИз рассмотрения этого рисунка и из соотношения (*) следует, что при изменении знака момента нагрузки электродвигатель начнет развивать тормозной момент лишь после того, как его скорость после предшествующего двигательного режима возрастет на величину
w = wdх.х.т w- х.х.дв Ud= 2В/ ce
Таким образом, при переходе из двигательного режима в режим рекуперативного торможения будет иметь место скачок скорости, т.е. при линейном согласовании не обеспечивается безлюфтовое сопряжение характеристик.
Дата добавления: 2015-01-29; просмотров: 1748; Мы поможем в написании вашей работы!; Нарушение авторских прав |