КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
МЕТОДЫ ИЗМЕРЕНИЙ
Измерение технологических параметров может производиться различными методами. Рассмотрим их на примере взвешивания тел на весах.
На рис. 12 показано взвешивание тел на пружинных весах без гирь, с использованием одной гири в качестве противовеса и на весах без пружины (рычажных) с набором гирь в качестве противовеса.
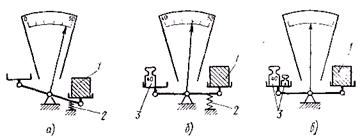
Рис. 12. Взвешивание тела: а — на пружинных весах без гирь, б — на пружинных весах с одной гирей, в—на рычажных весах с набором гирь; 1 — взвешиваемое тело, 2 — пружина, 3 -гири
Во всех трех случаях результат измерения отсчитывается после полного уравновешивания веса тела 1 силой сжатия пружины 2 и (или) весом гирь 3.
В первом случае (рис. 12, а) под действием веса тела пружина сжимается до тех пор, пока возникающая в ней сила сжатия не уравновесит вес тела. Здесь процесс уравновешивания происходит автоматически: уравновешивающая величина изменяется под действием измеряемой до наступления равновесия. Результат измерения — вес тела — отсчитывается по шкале весов.
Во втором случае (рис. 12, б) часть веса тела уравновешивается весом гири, а остальная — пружиной. Здесь процесс уравновешивания также происходит автоматически. Результат измерения — вес тела — отсчитывается, как и в первом случае, по шкале весов, но с учетом веса гири.
В третьем случае (рис. 12, в) пружины нет, а уравновешивание производится набором гирь. Равновесие наступает, когда стрелка весов останавливается в пределах шкалы. Ясно, что масса тела будет равна массе уравновешивающих его гирь. В этом случае процесс уравновешивания происходит уже не автоматически, а шкала весов служит лишь индикатором момента уравновешивания. Результат измерения — масса тела — в отличие от предыдущих случаев определяется только суммарной массой гирь.
Рассмотренные способы взвешивания иллюстрируют два возможных метода измерений: метод непосредственной оценки и метод сравнения с мерой,
Мерой называется такой элемент измерительной цепи, который предназначен для частичного или полного уравновешивания измеряемого параметра. Мера может иметь как постоянную, так и переменную, но всегда известную величину. В рассмотренном примере мерой массы тела является гиря с известной массой (рис. 12, б) или набор таких гирь, позволяющий получать переменную массу (рис. 12, в).
При наличии гири постоянной массы пружина уравновешивает разность весов тела и гири. Поэтому метод измерений с частичным уравновешиванием измеряемой величины величиной меры — разностный или дифференциальный. При этом разность Δх: между величиной меры хм и измеряемой величиной х преобразуется в выходной сигнал у — показания измерительного прибора. В этом случае шкала прибора выполняется уже с учетом величины меры. Структурная схема этого метода измерений показана на рис. 13,б.
При полном уравновешивании взвешиваемого тела переменным набором гирь (переменной мерой) разность массы тела и набора гирь доводится до нуля. Метод измерений с полным уравновешиванием измеряемой величины величиной переменной меры называется нулевым или компенсационным. Выходным сигналом — показаниями прибора — здесь является величина переменной меры хм. Структурная схема этого метода измерения показана на рис. 13,в.
Из всех методов сравнения с мерой дифференциальный и нулевой методы измерения являются наиболее распространенными.
При взвешивании тела без гирь (см. рис. 12, а) уравновешивание производится только пружиной. Такой метод измерений без использования меры — метод непосредственной оценки. При этом измеряемый параметр х непосредственно преобразуется в выходной сигнал — показания прибора. Структурная схема этого метода измерения показана на рис. 13, а.
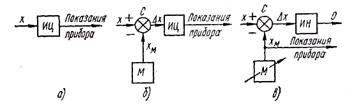
Рис. 13. Структурные схемы методов измерений: а — непосредственной оценки, б — дифференциальный, в — нулевой; ИЦ — измерительная цепь, ИН — индикатор нуля, М — мера, С — сумматор, х — измеряемый параметр, хм—величина меры, Δх — разность между измеряемым параметром и величиной меры
Рассмотрим теперь достоинства и недостатки каждого метода измерений.
Пусть взвешиваемые тела имеют массу в диапазоне от 40 до 50 кг. Как указывалось, для уменьшения погрешности измерений целесообразно применять измерительный прибор с наименьшим возможным диапазоном. Поэтому при взвешивании тел методом непосредственной оценки следует взять весы с диапазоном измерений 0—50 кг. Пусть класс точности весов 1,0. Тогда абсолютная погрешность взвешивания в соответствии с формулой (3) равна:
При дифференциальном методе измерений выберем в качестве меры гирю массой 40 кг. Тогда потребуются весы с диапазоном измерений 0—10 кг. В этом случае при том же классе точности весов абсолютная погрешность взвешивания будет:
Отсюда видно, что применение дифференциального метода вместо метода непосредственной оценки позволяет уменьшить абсолютную погрешность измерений в 5 раз при одном и том же классе точности измерительного прибора.
При взвешивании тех же тел нулевым методом, как отмечалось, весы играют роль индикатора нуля, а результатом измерений (показаниями прибора) является масса набора гирь, уравновешивающих взвешиваемое тело. Погрешность измерений в этом случае определяется порогом чувствительности весов. В самом деле, в момент уравновешивания масса набора гирь может отличаться от массы тела лишь на величину, равную порогу чувствительности весов. А так как порог чувствительности является лишь частью абсолютной погрешности весов, то при прочих равных условиях погрешность взвешивания нулевым методом будет меньше, чем дифференциальным.
Следовательно, в нашем примере погрешность взвешивания нулевым методом меньше 0,1 кг.
Таким образом, погрешность измерений может быть уменьшена при переходе от метода непосредственной оценки к дифференциальному и от дифференциального к нулевому. Однако такое уменьшение погрешности измерений достигается усложнением измерительной цепи: при дифференциальном методе уже требуется наличие меры, а при нулевом методе величину меры необходимо еще и изменять.
Дальнейшего совершенствования методов измерений можно добиться применением обратной связи, которая позволяет автоматизировать процесс уравновешивания при нулевом методе. Для этого индикатор нуля охватывается отрицательной обратной связью посредством подачи его выходного сигнала на вход через интегратор И, измерительный преобразователь ОП в цепи обратной связи, называемый обратным, и сумматор С (рис. 14).

Рис. 14. Структурная схема нулевого метода измерений с автоматическим уравновешиванием: С — сумматор, ИН — индикатор нуля, И — интегратор, П — выходной преобразователь, ОП —- преобразователь в цепи обратной связи, х—измеряемый параметр, хм — величина меры, Δх — разность между измеряемым параметром и величиной меры, х1, — выходной сигнал индикатора нуля, х2 — выходной сигнал интегратора
Выходной сигнал интегратора х2 представляет собой результат измерений входного сигнала — измеряемого параметра х, а обратный преобразователь играет роль переменной меры. Благодаря наличию интегратора такая следящая система является астатической.
Рассмотрим ее как астатическую следящую АСР (см. рис. 5, б). В такой АСР разность Δх между измеряемым параметром х и величиной меры хм является рассогласованием. Действие обратной связи приводит к тому, что в установившемся состоянии рассогласование Δх равно нулю, т.е. сигнал хм равен измеряемому сигналу х. Поэтому измеряемый параметр х связан с результатом измерений х2 точно так же, как связана с ним величина меры хм.
Но сигнал хм является выходным сигналом обратного преобразователя ОП, а сигнал х2 — входным. Следовательно, зависимость результата измерений х2 от измеряемого параметра х определяется только метрологическими характеристиками обратного преобразователя.
Заметим, что автоматического уравновешивания измеряемого параметра величиной меры можно также добиться применением статической АСР с достаточно глубокой обратной связью. Схема такой АСР отличается от приведенной на рис. 14 только отсутствием интегратора И. Установившееся отклонение сигнала хм от измеряемого сигнала х в этом случае не равно нулю (Δх≠0), но его можно сделать достаточно малым при увеличении глубины обратной связи. Достоинством нулевого метода измерений на основе статической АСР является отсутствие интегратора, что в некоторых случаях дает возможность значительно упростить конструкцию измерительной цепи.
Автоматизация процесса уравновешивания позволяет широко применять нулевой метод измерений в промежуточных преобразователях и измерительных приборах. В большинстве же первичных преобразователей ни дифференциальный, ни нулевой методы, к сожалению, не могут быть использованы. Это объясняется тем, что практически невозможно создать обратный преобразователь с выходным сигналом той же природы, что и измеряемый технологический параметр: расход, температура, концентрация, уровень и т.п. Поэтому в первичных преобразователях применяется, как правило, метод непосредственной оценки.
Дата добавления: 2015-01-29; просмотров: 347; Мы поможем в написании вашей работы!; Нарушение авторских прав |