КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Электрические элементарные преобразователи
Наиболее распространенные электрические элементарные преобразователи приведены в табл. 4.
Таблица 4 Электрические элементарные преобразователи
| Элементарный преобразователь | Входной сигнал | Выходной сигнал |
| Реостат | Линейное перемещение | Электрическое сопротивление |
| Неуравновешенный мост | Электрическое сопротивление | Напряжение |
| Магнитоэлектрический преобразователь | Ток | Сила |
| Трансформаторный преобразователь | Линейное или угловое перемещение | Взаимная индуктивность |
| Усилитель | Напряжение | Напряжение |
| Реверсивный электродвигатель | Напряжение | Угол поворота (угловое многооборотное перемещение) |
Реостат.Представляет собой намотанную на каркас проволочную спираль, по которой перемещается передвижной контакт (рис. 17). Реостат предназначен для преобразования перемещения l в изменение электрического сопротивления R.
Существуют реостаты с линейной и нелинейной характеристиками. Зависимость выходного сигнала от входного для реостатов с линейной характеристикой имеет вид:
R = kl. (11)
Коэффициент пропорциональности k и в этой формуле является коэффициентом передачи реостата.
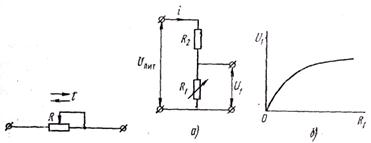
Рис. 17. Реостат Рис. 18. Делитель:
а — схема, б - статическая характеристика
Достоинство реостата как преобразователя — возможность получения любой заданной зависимости выходного сигнала от входного, например линейной или квадратичной.
Следует иметь в виду, что для работы реостата как преобразователя его необходимо включить в электрическую цепь. При этом в зависимости от способа включения выходным сигналом реостата может быть напряжение на нем, ток или сопротивление. В последнем случае его включают в специальную схему, называемую уравновешенным мостом.
Неуравновешенный мост.Некоторые технологические параметры, например температура, первичным преобразователем преобразуются в изменение электрического сопротивления. Такие преобразователи можно рассматривать как резисторы с переменным сопротивлением. Для работы переменного резистора его, так же как и реостат, необходимо включить в электрическую цепь. В качестве такой цепи часто используют неуравновешенный мост, который преобразует переменное сопротивление в напряжение.
Чтобы понять принцип действия неуравновешенного моста, рассмотрим сначала более простой преобразователь сопротивления в напряжение, называемый делителем. Делитель представляет собой последовательное соединение переменного резистора R1 и постоянного резистора R2, включенных по схеме, показанной на рис. 18, а. Входным сигналом делителя является сопротивление резистора R1, а выходным — напряжение на нем U1.
Для работы делителя на него необходимо подать напряжение питания Uпит При изменении входного сигнала — сопротивления R1 — изменяется и общее сопротивление делителя, равное R1+ R2. При этом изменяется ток через делитель i и напряжение на переменном резисторе U1 , т.е. выходной сигнал. В соответствии с законом Ома для участка цепи ток i через делитель равен:
 (12)
(12)
а напряжение на резисторе определяется по формуле
 (13)
(13)
Статическая характеристика делителя приведена на рис. 18, б, откуда видно, что она нелинейная.
Кроме нелинейности характеристики делитель обладает еще одним недостатком: его выходное напряжение равно нулю при нулевом сопротивлении переменного резистора. Диапазон же изменения сопротивления переменных резисторов, применяемых в качестве первичных преобразователей, как правило, начинается не от нуля, а от некоторого начального сопротивления. Поэтому значительная часть возможного диапазона изменения выходного напряжения делителя оказывается неиспользованной.
Этого недостатка лишен неуравновешенный мост (рис. 19, а), благодаря применению в нем двух параллельно включенных делителей: рассмотренного выше с переменным резистором R1и второго — с постоянными резисторами R3 и R4. Резисторы, составляющие мост, называются его плечами.
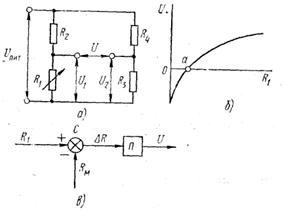
Рис. 19. Неуравновешенный мост: а – схема, б – статическая характеристика, в – структурная схема неуравновешенного моста вблизи состояния равновесия; С – сумматор, П – преобразователь
Входным сигналом моста является сопротивление переменного резистора R1 а выходным — напряжение U, равное разности выходных сигналов делителей U1 и U2.
Выходной сигнал постоянного делителя связан с сопротивлениями его резисторов, так же как и в переменном делителе, по формуле
 (14)
(14)
Поэтому для неравновешенного моста зависимость выходного сигнала U от входного R1 имеет вид:
 , (15)
, (15)
т.е.  . (16)
. (16)
График этой зависимости приведен на рис. 19, б. Как видно из графика, зависимость выходного сигнала неуравновешенного моста от входного нелинейная. Из графика также видно, что выходное напряжение неуравновешенного моста U равно нулю при ненулевом сопротивлении переменного резистора R1 (точка а). Как следует из формулы (16), подбором сопротивлений постоянных плеч моста всегда можно добиться того, чтобы нулевой выходной сигнал соответствовал началу диапазона изменения сопротивления переменного резистора (чтобы начало диапазона было в точке а).
Состояние моста, при котором его выходной сигнал равен нулю, называется состоянием равновесия, а мост в этом состоянии — уравновешенным.
Обозначим значение измеряемого сопротивления R1 при котором достигается равновесие моста, через Rм.Тогда из формулы (16), полагая U=0, найдем условие равновесия:
RмR4=R2R3 (17)
Отсюда следует, что мост уравновешен, когда произведения сопротивлений противоположных плеч равны.
Обозначим теперь через ΔR отклонение сопротивления R1 переменного резистора от величины Rм, т. е.
ΔR=R1-Rм (18)
Величина Rм постоянна и может быть найдена по формуле (17) через сопротивления постоянных плеч моста.
Как видно из графика (рис. 19, б), при малых отклонениях от состояния равновесия моста (вблизи точки а), т.е. когда величины ΔR и U малы, зависимость выходного сигнала U от отклонения ΔR приближенно можно считать линейной:
U=k·ΔR (19)
где коэффициент пропорциональности k— коэффициент передачи моста вблизи состояния равновесия.
Как следует из формул (18) и (19), в неуравновешенном мосту вблизи состояния его равновесия производятся две операции: алгебраическое суммирование (вычитание) измеряемого сопротивления R1 и постоянной величины Rм; линейное преобразование их разности ΔR в выходное напряжение моста U. Поэтому неуравновешенный мост как преобразователь сопротивления R1 в напряжение U можно представить в виде последовательного соединения двух функциональных элементов (рис. 19, в): сумматора С с выходным сигналом ΔR и преобразователя П с выходным сигналом U.
Из сравнения рис. 19, в и 13, б можно заключить, что неуравновешенный мост реализует дифференциальный метод измерения, а сопротивление Rм представляет собой величину постоянной меры. Особенность неуравновешенного моста заключается в том, что мера конструктивно является частью моста и образована резисторами его постоянных плеч.
Дата добавления: 2015-01-29; просмотров: 472; Мы поможем в написании вашей работы!; Нарушение авторских прав |