КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Магнитоэлектрический преобразователь.
Предназначен для преобразования тока в силу (рис. 20). Он состоит из постоянного магнита 1 и магнитопровода 2, образующих магнитную цепь, в разрыве которой помещена катушка 3.

Рис 20 Магнитоэлектрический преобразователь: 1 – постоянный магнит, 2 – магнитопровод, 3 - катушка
При взаимодействии электрического тока i, протекающего по катушке, с полем постоянного магнита возникает сила F, действующая на катушку. Зависимость этой силы от тока по закону силового действия тока выражается формулой
F=k·i (20)
где коэффициент пропорциональности k является коэффициентом передачи магнитоэлектрического преобразователя.
Достоинством магнитоэлектрического преобразователя является линейность его характеристики.
Трансформаторный преобразователь.Трансформаторный, или взаимоиндуктивный, преобразователь служит для преобразования перемещения во взаимоиндуктивность. Для преобразования линейных перемещений наибольшее применение получили дифференциально-трансформаторные преобразователи, а для угловых перемещений — ферродинамические.
Чтобы понять принцип действия дифференциально-трансформаторного преобразователя, рассмотрим сначала более простой преобразователь линейного перемещения во взаимоиндуктивность (рис. 21, а). Он представляет собой трансформатор, состоящий из двух обмоток: первичной 1 и вторичной 2, расположенных на каркасе 3. Внутри каркаса может перемещаться железный плунжер 4, который изменяет магнитную, проницаемость среды. Поэтому выходной сигнал трансформатора — взаимоиндуктивность его обмоток М — зависит от входного сигнала — положения плунжера 1. Взаимоиндуктивность максимальная, когда плунжер находится в середине каркаса, и уменьшается при его выдвижении из каркаса. График зависимости выходного сигнала трансформатора М от входного 1 приведен на рис. 21, б.

Рис. 21. Трансформаторный преобразователь: а — устройство, б — статическая характеристика; 1 — первичная обмотка, 2 — вторичная обмотка, 3— каркас, 4 — плунжер.
Дифференциально - трансформаторный преобразователь (рис. 22, а) состоит из двух одинаковых трансформаторов с общим каркасом и плунжером. Обе обмотки каждого трансформатора расположены на одной из половин каркаса.
Электрическая схема дифференциально-трансформаторного преобразователя показана на рис. 22, б. Как видно из схемы, первичные обмотки обоих трансформаторов соединены так, что одна является продолжением другой (согласное включение обмоток). Вторичные же обмотки трансформаторов соединены встречно, т. е. так, что их э.д.с. взаимоиндукции вычитаются друг из друга (встречное включение). Поэтому и взаимоиндуктивность дифференциально-трансформаторного преобразователя равна разности взаимоиндуктивностей составляющих его трансформаторов.
Графики зависимостей взаимоиндуктивности каждого трансформатора М1, М2 и взаимоиндуктивности всего дифференциально-трансформаторного преобразователя М (выходной сигнал) от перемещения плунжера l (входной сигнал) приведены на рис. 22, в. Из этих графиков видно, что при среднем положении плунжера (l=0) взаимоиндуктивности обоих трансформаторов одинаковы и их разность М равна нулю.
В промышленных дифференциально-трансформаторных преобразователях ход плунжера выбирается малым по сравнению с длиной катушек трансформатора (обычно не более 5 мм). При этом, как видно из рис. 22, в, зависимость взаимоиндуктивности М от перемещения плунжера l можно считать линейной:
М=k·l (21)
где коэффициент пропорциональности M является коэффициентом передачи дифференциально-трансформаторного преобразователя.
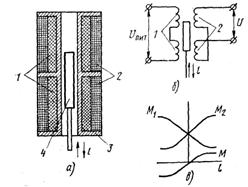
Рис. 22. Дифференциально-трансформаторный преобразователь: а — устройство, б — электрическая схема, в — статическая характеристика; 1 — первичные обмотки, 2 — вторичные обмотки, 3 — каркас, 4 — плунжер
Линейность статической характеристики выгодно отличает дифференциально-трансформаторный преобразователь от простого трансформаторного.
Рассмотрим теперь ферродинамический преобразователь углового перемещения во взаимоиндуктивность (рис. 23, а). Он представляет собой трансформатор, первичная обмотка которого 1 намотана на железный сердечник 2, а вторичная обмотка 3 выполнена в виде поворотной рамки и находится в зазоре между концами сердечника. В соответствии с законом электромагнитной индукции взаимоиндуктивность М обмоток 1 и 3 ферродинамического преобразователя зависит от положения вторичной обмотки по отношению к силовым линиям магнитного поля между концами сердечника.
Когда рамка со вторичной обмоткой расположена вдоль силовых линий, взаимоиндуктивность равна нулю. При повороте рамки в ту или иную сторону от этого положения взаимоиндуктивность увеличивается по абсолютной величине, а знак ее зависит от направления поворота рамки. График зависимости выходного сигнала ферродинамического преобразователя — взаимоиндуктивности М — от входного сигнала — угла поворота рамки φ — приведен на рис. 23, б.
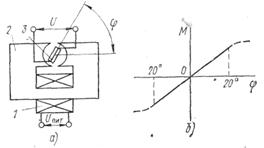
Рис. 23. Ферродинамический преобразователь: а — устройство, б — статическая характеристика; 1 — первичная обмотка, 2 — сердечник, 3 — вторичная обмотка (рамка)
В промышленных ферродинамических преобразователях используется небольшой угол поворота рамки (обычно ±20°), при котором зависимость взаимоиндуктивности М от угла поворота φ остается линейной:
М = k·φ, (22)
где коэффициент пропорциональности k является коэффициентом передачи ферродинамического преобразователя.
Необходимо иметь в виду, что трансформаторный преобразователь необходимо включать в электрическую цепь переменного тока. При этом аналогично реостатному преобразователю его выходным сигналом будет напряжение U или ток i. Выходной сигнал трансформаторного преобразователя в виде взаимоиндуктивности можно получить только включив его в мост переменного тока.
При включении трансформаторного преобразователя по обычной, не мостовой схеме (см. рис. 22, б и 23, а) его выходной сигнал U или i будет зависеть от колебаний питающего напряжения Uпит, что является недостатком данной схемы. Для устранения этого недостатка приходится применять стабилизированные источники питания.
Трансформаторные преобразователи, так же как и реостатные, преобразуют линейное перемещение в электрический сигнал. Казалось бы, для этой цели можно ограничиться реостатным преобразователем, как более простым. Однако трансформаторные преобразователи обладают существенным преимуществом перед реостатными: у них нет подвижных электрических контактов. Это преимущество является решающим при работе преобразователя в агрессивных средах, где подвижные электрические контакты ненадежны.
Усилитель.В измерительных цепях усилители предназначены для пропорционального усиления электрических сигналов. Различают усилители сигнала по величине — усилители напряжения или тока и усилители сигнала по мощности — усилители мощности, не изменяющие величины усиливаемого сигнала. Усиление сигналов по величине применяется в измерительных цепях, построенных по принципу следящей системы, для увеличения глубины обратной связи. Усилители мощности применяют обычно для устранения нагрузочного эффекта.
Реверсивный электродвигатель.По своим свойствам реверсивный электродвигатель, как преобразователь, является интегратором. Действительно, пока к нему приложено напряжение, вал электродвигателя вращается. При снятии напряжения вал останавливается. Таким образом, при наличии входного сигнала выходной сигнал такого преобразователя непрерывно изменяется, а при отсутствии его может быть любым, но неизменным. Такие свойства характерны для интегратора. Поэтому реверсивный электродвигатель обычно применяется в измерительных приборах с астатической обратной связью.
Дата добавления: 2015-01-29; просмотров: 493; Мы поможем в написании вашей работы!; Нарушение авторских прав |