КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
КЛАССИФИКАЦИЯ БЗУ И ФУНКЦИОНАЛЬНЫХ ДЕЙСТВИЙ В НИХ
С учетом основных тенденций развития средств автоматизированной загрузки наиболее важным считают признак, характеризующий БЗУ как гибкую технологическую систему: характер совмещенности функций захвата и ориентирования в БЗУ. Если эти функции совмещены, т. е. захват и ориентирование происходят одновременно, то устройство является узкоспециализированным, предназначенным для одного конкретного вида заготовок. Как правило, при переходе к новому виду необходима существенная переделка или конструирование нового БЗУ. Производительности по захвату
и ориентированию их в БЗУ одинаковы. Более прогрессивными БЗУ являются такие, в которых функции захвата и ориентирования разделены, но зависят друг от друга. Это значит, что в каждом захватном органе последовательно происходит захват, а затем
ориентирование. Благодаря этому обеспечивается лучший захват заготовок, но производительности БЗУ по захвату и ориентированию не равны и, следовательно, итоговая производительность БЗУ будет определяться меньшей производительностью этих двух
процессов. Для гибких технологических систем наилучшими будут такие БЗУ, в которых функции захвата и ориентирования не только разделены, но и не зависят друг от друга. В таких устройствах захват происходит с помощью одних механизмов, а ориентирование проводится в отдельном механизме. При этом могут быть приняты меры для выравнивания производительностей этих механизмов. Так как захват и ориентирование разделены и независимы, то можно менять одни устройства для захвата или ориентирования на другие при переходе на новые заготовки, что и требуется для гибких технологических систем. При создании БЗУ немаловажное значение имеет также кинематическая сложность его, которая обусловлена характером движения исполнительных органов. В создаваемых ранее устройствах движения создавались классическими преобразовательными механизмами: кривошипно-ползунным или кулисным, храповым, мальтийским и др. Для совершенствования БЗУ стали использовать кинематически более сложные механизмы, когда складывается, например, два возвратно-поступательных движения, или два вращательных движения, три движения и т. п.
Рассмотрим принцип действия БЗУ, приведенных ниже.


В трубчатых БЗУ (рис. 6, а, в, е) захват и одновременно ориентирование заготовок типа роликов, валиков, стаканчиков, шариков происходит за счет движения трубки относительного бункера. При этом трубка может либо вращаться, либо совершать возвратно-поступательное движение, а бункер стоит неподвижно. Аналогичные движения может совершать бункер, а трубка будет неподвижна. Возможны и различные комбинации этих движений (рис. 6, е).
Пневмовихревые БЗУ (рис. 6, б) в некотором роде аналогичны трубчатому БЗУ, но в них нет подвижных частей. Захват же и ориентирование осуществляется благодаря вихревому движению воздуха, создающего в центре бункера и в трубке полость низкого давления, куда втягиваются заготовки. Дополнительное силовое воздействие существенно ускоряет процесс захвата.
Стержневое БЗУ (рис. 6, г) применяют для заготовок типа стаканчиков, которые захватываются и ориентируются за внутреннюю поверхность возвратно-поступательно движущимся стержнем, выносящим заготовку из общей массы в приемник, соединенный с лотком.
В однокрючковом БЗУ стержень для захвата (например, колец) совершает возвратно-качательное движение (рис. 6, д). Однако такое устройство является узкоспециализированным.
Рассмотрим примеры многозахватных БЗУ. Если в элеваторном БЗУ (см. рис. 4) вместо планок установить крючки, то ими можно захватывать и одновременно ориентировать полые стаканчики, трубчатые заготовки и т. п.


Рис. 7. Многозахватные БЗУ с совмещенными функциями захвата и ориентирования
Шнековые БЗУ (рис. 7, а) применяют для заготовок типа подшипниковых роликов, иголок, а иногда коротких винтов. Захват заготовок осуществляется карманами, образующимися между двумя вращающимися валками, на которых нарезаны невысокие (пологие) винтовые выступы. Ориентирование происходит в тех же карманах, что и захват.
К группе многозахватных БЗУ относят устройства с захватом поштучно в несколько последовательно работающих захватных органов (дисковое БЗУ с крючками и карманами, рис. 7, б, г) или с захватом порциями (дисковое щелевое, рис. 7, в), а также за любую поверхность: наружную, внутреннюю или обе одновременно. Загрузочных устройств этого типа сконструировано весьма много. Особенностью их является то, что все они специального назначения, т. е. для каждого нового вида заготовок создается свое БЗУ, что и обусловило их многообразие. В некоторых многозахватных БЗУ необходимо чередовать движение исполнительных органов с остановками, так как при вращении органов происходит захват и ориентирование заготовки в захватных органах, а для выдачи в лоток-магазин захватный орган не обходимо совместить с одним или несколькими приемниками. Примером таких устройств являются лопастное устройство (рис. 7, е) для загрузки П-образных пластин и дисковое (рис. 7, д) с фигурными карманами для заготовок типа колпачков с l/d ≈ 1. В последнем устройстве диск расположен горизонтально, а выдача захваченных сориентированных заготовок осуществляется в несколько вертикально установленных приемников.
Достаточно широкое распространение получили шиберные (иногда именуемые ножевые) БЗУ (рис. 7, ж) с периодически поднимающимся и опускающимся шибером. В этом БЗУ одновременно захватывается несколько заготовок. В зависимости от сложности заготовок профиль шибера может меняться и тогда удается во время захвата обеспечить ориентирование заготовки. Естественно, что номенклатура заготовок, которые можно ориентировать в таком БЗУ, невелика: болты, винты, кольца, шайбы, диски.
Секторные БЗУ (рис. 7, з) отличаются от шиберных БЗУ лишь характером движения исполнительного органа. Возможности же по захвату и ориентированию их одинаковы.
В роторных БЗУ (рис. 7, и—м) захватные и одновременно ориентирующие органы, кроме непрерывного транспортного вращательного движения, получают дополнительные движения: возвратно-поступательное для захвата стаканчиков стержней; возвратно-качательное движение дна или специальной решетки — для колпачков. Хотя благодаря большому числу захватных органов удается получить большую производительность, такие устройства находят лишь специальное применение.
Рассмотрим БЗУ, в которых функции захвата и ориентирования разделены, но зависят друг от друга.
К группе многозахватных БЗУ с непрерывным вращательным движением относят большую группу дисковых БЗУ (рис. 8, а—д). Характерным для всех них является то, что сначала осуществляется захват заготовки. Причем так как захват заготовки может быть выполнен в нескольких различных положениях, то можно использовать гораздо больше приемов для подготовки к захвату, что позволит достичь большей вероятности захвата. Благодаря этому создаются предпосылки как для получения высокой производительности, так и для расширения номенклатуры загружаемых заготовок. Ориентирование же может происходить либо в приемнике (рис. 8, а), либо в самих захватных органах в специально отведенной зоне (рис. 8, б) или специальном ориентаторе; с помощью вращающегося диска со штырьками (рис. 8, д), ориентирующим плужком (рис. 8, в) или с использованием смещения центра масс и выреза в обечайке (рис. 8, г). Форма же захватного органа обусловлена способом захвата и способом ориентирования. В процессе ориентирования возможна потеря тех или иных заготовок, и поэтому конечная производительность БЗУ уменьшится по сравнению с производительностью по захвату. Кроме того, трудно изменить конструкцию захватного органа и особенно ориентатора. Обычно эти устройства специализированные (для каждого конкретного вида заготовок) и число их разновидностей велико.
В роторных БЗУ с разделением функции захвата и ориентирования (рис. 8 е, ж) достигаются те же результаты, что и в дисковых. Их производительность также определяется наиболее медленно работающим органом (а это, как правило, ориентатор).


Рис. 8. БЗУ с разделенными, но зависимыми функциями захвата и ориентирования
В устройстве, показанном на рис. 8 е, ориентирование проводится в гравитационном ориентаторе, а в устройстве, показанном на рис. 8, ж — в механическом. Так как габариты этих ориентаторов гораздо больше габаритов захватывающих трубок, то увеличиваются размеры роторов и их окружных скоростей вращения, что ухудшает динамику работы. Такие роторные БЗУ трудно переводить на новые заготовки.
Бункерные загрузочные устройства, в которых функции захвата и ориентирования разделены и не зависят друг от друга, характеризуются тем, что в них сначала осуществляется захват, в основном за наружную поверхность. Таким образом получается поток упорядоченных, но неориентированных заготовок. Затем после завершения захвата проводится ориентирование в специальных устройствах, находящихся либо в непосредственной близости от захватных органов (центробежное), либо вдали от них, либо на тех же органах (вибрационные, в которых эти процессы идут на различных витках чаши, и вибророторные), либо в совершенно других устройствах (роторные). Ориентаторы этих БЗУ можно быстро заменять; поток заготовок после прохождения через них не меняет свою плотность, что обеспечивает максимальную производительность и быструю переналадку БЗУ.
На рис. 4 было представлено элеваторное БЗУ, в котором из общей массы могут быть захвачены заготовки различных типов. В этом случае необходимо либо изменить ориентатор путем регулировки при использовании аналогичных заготовок, либо заменить ориентатором другого типа. Многорядный захват и возможность передачи заготовки к любому ориентатору из разных рядов обеспечивают высокую плотность потока сориентированных заготовок даже при незначительной вероятности захвата в одном ряду.
Шиберное БЗУ (рис. 9, а) с минимальными переналадками можно использовать для заготовок, различающихся как по геометрическим размерам, так и по массе.
В барабанном БЗУ (рис. 9, б) может достигаться интенсивный захват в несколько вибролотков, проходящих через БЗУ, на выходной части которых устанавливаются сменные ориентаторы.
В центробежных БЗУ (рис. 9, в), получивших широкое распространение в пищевой промышленности, сменные ориентаторы могут устанавливаться на периферии вращающегося диска.
Лопастное БЗУ (рис. 9, г) позволяет в отличие от барабанного обойтись без вибролотков, для доставки заготовок к ориентатору используется конвейер.

Рис. 9. БЗУ с разделенными и независимыми функциями захвата и ориентирования
Широкое распространение вибрационных БЗУ (рис. 9, д) обусловлено именно возможностью разделения процессов захвата и ориентирования. Если первый процесс происходит в нижней части чаши БЗУ, то второй путем увеличения числа витков может быть вынесен в ее верхнюю часть. Дополнительные витки можно использовать
для изменения плотности потока заготовок после захвата. Простота изменения скорости движения заготовок, определяющей производительность БЗУ, создает предпосылки для использования их в высокоавтоматизированных системах.
В роторном БЗУ (рис. 9, е) захват и ориентирование могут выполняться в различных роторах, причем в ориентирующем роторе можно заполнять «дырки» в потоке захваченных заготовок из внутрироторного запаса. Вибророторное БЗУ (рис. 9, ж), обладая преимуществами центробежных и вибрационных БЗУ, обеспечивает производительность до 3000 заготовок в минуту.
Все БЗУ по типу захватных органов можно разделить по двум критериям: по массовости захвата (поштучный, порционный и непрерывный) и по характеру захвата (за наружную, внутреннюю или обе поверхности одновременно). Наиболее распространенным является захват за наружную поверхность, так как он более производителен и универсален, что и соответствует требованиям гибких технологических систем.

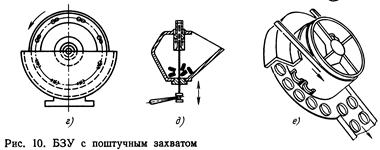
Захват за наружную поверхность осуществляется захватными органами типа карманов (рис. 10, а, б; 11, а, б). Щель, лопасть (рис. 11, б, г), трубка, дорожка могут быть представлены как разновидности кармана, отличающиеся от него и друг от друга соотношением длины lк, ширины bк и и глубины tк.

К захватным органам относят вакуумные присосы (рис. 10, б), магнитные захваты (рис. 11,3) и фрикционные диски (рис. 12, б). Первые два могут быть использованы для захвата поштучно, партией и потоком. Захват с использованием сил трения широко применяют в центробежных питателях. Захват за внутреннюю или обе поверхности менее распространен и характерен для специализированных устройств. Действительно, крючками (рис. 10, г) и стержнями (рис. 10, д) можно захватывать лишь заготовки с внутренними полостями. Партионно за внутренние поверхности можно захватывать только некоторые заготовки — типа скоб (рис. 11, е). За обе поверхности можно захватывать невысокие колпачки. Для этих целей можно использовать БЗУ, схема которого изображена на рис. 10, е или на рис. 7, д.
Производительность БЗУ во многом зависит от правильного выбора способа подготовки заготовки к захвату.

Способы подготовки заготовки к захвату отличаются силами, осуществляющими подготовительное движение; геометрическими особенностями заготовки; конструктивными особенностями бункера; характером подготовительного движения заготовки и направлением подготовительного движения.
Силами, осуществляющими подготовительное движение заготовок, являются: 1) силы тяжести; 2) силы трения; 3) силы инерции и 4) внешние силы.
К геометрическим особенностям заготовок относят: 5) форму, 6) смещение центра масс и 7) соотношение размеров; к конструктивным: 8) наклон и 9) форму дна, 10) форму захватных органов.
Подготовительное движение заготовки по характеру может быть: 11) скольжением, 12) пересыпанием, 13) качением и 14) полетом; а по направлению — 15) попутным, 16) встречным и 17) поперечным.
На рис. 13 приведены примеры, иллюстрирующие подготовку к захвату. На рис. 13, а показано БЗУ с наклонным дном, по которому заготовки под действием сил тяжести передвигаются от места засыпки к захватным органам (скользят, катятся и пересыпаются).
Единичные заготовки типа стакана со смещенным центром масс и длиной, большей его диаметра, стремятся двигаться лежа. При движении в общей массе каждая заготовка, выбирая путь наименьшего сопротивления, стремится перемещаться стоя, дном вниз.
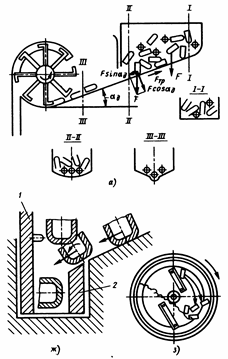

Рис. 13. Способы подготовки к захвату
Если длина заготовки типа стакана меньше диаметра и центр масс смещен к дну, то такая заготовка будет скользить дном. В этом случае благоприятным окажется захват заготовки за наружную поверхность карманом.
Заготовки, которые приняли вертикальное положение (дном вниз), вследствие давления последующих движущихся заготовок опрокидываются и ложатся открытой частью к захватному органу — крючку. Такое положение заготовки благоприятно для захвата. Эксперименты показывают, что для стаканов с отношением l/d = 3 благоприятное положение занимают до 70—80 % заготовок, чем обеспечивается высокая вероятность захвата.
Если заготовки насыпать на вращающийся горизонтальный диск (рис. 13, б), то под действием сил трения и центробежных сил они будут перемещаться к периферии, поштучно отделяясь от общей массы. В расположенные по периферии захватные органы типа окон или карманов заготовки будут забрасываться с большой силой. При этом центр масс заготовок будет стремиться занять низшее положение, «стоячая» заготовка будет стремиться «лечь», плоская заготовка — расположиться на диске своей большей поверхностью, заготовка со смещенным центром масс относительно середины—двигаться центром масс вперед. В соответствии с этими положениями заготовок и следует располагать захватные органы.
При вращении барабана (рис. 13, в), у которого захватные органы расположены на внутренней поверхности, происходит непрерывное пересыпание заготовок. Это пересыпание и ворошение заготовок захватными органами используется почти во всех БЗУ как способ подготовки к захвату. Если перемешивание заготовок захватными органами недостаточно, то применяют специальные ворошилки. На рис. 13, з, к показаны установленные на спицах или диске специальные лапки и угольники, которые разбрасывают заготовки в бункере. В результате заготовки движутся к захватным органам широким потоком и с большей скоростью, что увеличивает вероятность захвата. При свободном полете с вращением заготовка преимущественно стремится занять в пространстве положение, соответствующее наибольшему значению статического момента инерции. Это положение заготовки и является благоприятным для захвата.
В БЗУ, особенно имеющих коническую форму, могут возникать трудно разрушаемые своды. Для устранения этих сводов прибегают к определенным мерам. На рис. 13, д показан электромагнитный вибратор, который встряхивает заготовки, побуждая их к движению, и приводит в положение благоприятное для захвата. Для встряхивания заготовок применяют механические и электромагнитные вибраторы с малыми амплитудами колебаний (до 1 мм) и частотой до 100 Гц. Установка БЗУ непосредственно на станке или на прессе благоприятно сказывается на процессе подготовки к захвату, так как возникающие при работе вибрации станин вызывают встряхивание бункера. С этой точки зрения установка БЗУ на отдельном фундаменте менее рациональна. Хорошие результаты по подготовке к захвату получены в БЗУ с двумя вращающимися в противоположные стороны дисками (рис. 13). Нижний диск с захватными органами вращается в одном направлении, а специальный ворошильный диск — в противоположную сторону. Благодаря этим движениям своды разрушаются, заготовки пересыпаются и побуждаются к дополнительному движению, увеличивается зона захвата, заготовки переводятся в положение, параллельное захватному органу, благоприятное для захвата. Наклон дисков и обечайки бункера к горизонту под определенными углами создает предпосылки для подготовки к захвату как с диска, так и со стенки бункера.
Для улучшения захвата на диске БЗУ наряду с захватными органами 1 могут быть нанесены дополнительные пазы 2 (рис. 13, е), в которых размещаются захваченные заготовки. В нижней части БЗУ заготовки по пазам перемещаются под действием силы тяжести в захватные органы. В пазы может поместиться большое число заготовок, и поэтому большинство захватных органов будет заполнено заготовками. Геометрическая форма заготовки определяет как способ захвата, так и способы подготовки заготовки к захвату.
Например, при наличии удобной для захвата внутренней полости подготовка к захвату должна способствовать движению заготовки открытой частью навстречу захватному органу. В одних случаях захват за наружную поверхность осуществляется карманами, имеющими большие внутренние размеры и способными вместить заготовку в любых положениях. Здесь подготовка к захвату сводится к ворошению заготовок для поштучного разделения и подаче их к захватным органам обычно по наклонному дну бункера.
В других случаях захват за наружную поверхность обеспечивается карманами простейшей геометрической формы с габаритными размерами, позволяющими вместить заготовку в двух или трех возможных положениях, обычно лежащих в одной из геометрических плоскостей, с последующим ориентированием или удалением заготовок, захваченных в неправильном положении.
Если в БЗУ захват заготовки за наружную поверхность необходим только в одном положении заготовки, то форма и размеры кармана должны соответствовать форме и размеру сечения заготовки в благоприятном для захвата положении.
Характер подготовительного движения заготовки в бункере существенно влияет на вероятность захвата. Пересыпание заготовок (рис. 13, з, и) и свободный полет (рис. 13, к) создают более высокую скорость движения заготовки и наибольшую зону захвата, но менее точное направление движения к захватному органу. При скольжении заготовок (см. рис. 13, г, ж) скорость подготовительного движения меньше, чем при пересыпании, но направление движения более точное. Качение шаровых и цилиндрических заготовок обеспечивает значительную скорость и точное направление подготовительного движения, что создает условия для хорошего захвата и повышает производительность БЗУ. В некоторых конструкциях БЗУ заготовки, пересыпаясь по диску (см. рис. 13, з) с помощью ворошилок, могут быть направлены в ту зону БЗУ, где на диске отсутствуют заготовки. Так как заготовки движутся в определенном положении, то они беспрепятственно попадают в захватные органы. Выбор направления относительного движения захватных органов и заготовок оказывает значительное влияние на длительность и вероятность захвата.
При проектировании БЗУ необходимо стремиться к использованию максимального числа способов подготовки к захвату в одном устройстве. Подготовка к ориентированию состоит в том, чтобы захваченным заготовкам (систематизированному потоку) придать некоторую свободу в пространстве, так как в процессе ориентирования должно быть изменено положение заготовки. Для этого применяют всевозможные вырезы в обечайках БЗУ, расширяют дорожки вибрационных БЗУ, а для сброса лишних слоев заготовок с захваченных используют пружины, сталкиватели, карнизы и другие приспособления. Естественно, что подготовка к ориентированию возможна лишь в тех БЗУ, где функции захвата и ориентирования разделены.
Процесс ориентирования в автоматизированной загрузке — один из сложнейших. Объясняется это тем, что применяемые заготовки чрезвычайно отличаются по геометрической форме, габаритным размерам, массе, механическим и физическим свойствам, а также положениями, в которых даже одна и та же заготовка может быть подана на рабочую позицию технологического оборудования. Процесс ориентирования заготовок, движущихся после захвата систематизированным потоком, возможен в БЗУ, выполненном с разделением функций захвата и ориентирования.
Различают БЗУ: с выдачей заготовок под действием сил тяжести, под действием сил тяжести и сил инерции и под действием внешних сосредоточенных сил. По характеру траектории движения заготовок из захватных органов в приемник существуют БЗУ с плавной, непрерывной и с ломаной траекториями движения заготовок.
Для приведения в движение захватных органов или самих заготовок, как, например, в пневмовихревом или вибрационном БЗУ, могут быть использованы все имеющиеся приводы: механические, пневматические, электромагнитные, гидравлические, инерционные и т. п.
Тип выбранного привода непосредственно влияет и на тип устройства для самовосстановления работоспособности БЗУ. Это особенно важно, так как средства автоматизированной загрузки, в частности БЗУ, должны обеспечить работу технологического устройства в режиме с минимальным участием человека в обслуживании оборудования и средств автозагрузки. Однако вследствие вероятностного принципа работы БЗУ в нем могут довольно часто возникать всевозможные отклонения, в том числе приводящие к заклиниваниям, застреваниям. Установка предохранительных муфт, не позволяющих передавать на рабочие органы предельные крутящий момент, усилия, мощность, не дает эффекта, так как в этом случае движение рабочих органов или заготовок прекратится и возобновится только после вмешательства человека, что противоречит требованиям автоматизации. Поэтому необходимо не только избегать поломки рабочих органов БЗУ при застреваниях, заклиниваниях и подобных явлениях, но и устранять возникшие отклонения без участия человека.
Вопрос самовосстановления работоспособности можно решить двумя путями. Первый путь — проектирование таких БЗУ, которые позволяют полностью избежать застреваний заготовок в них [например, шиберные (см. рис. 3) и элеваторные (см. рис. 4) БЗУ].
Второй путь — использование амортизаторов-вибраторов — устройств, которые, с одной стороны, не позволяют деформировать заготовки или захватные органы в критических ситуациях (функция предохранительной муфты или амортизатора), а с другой — заставляют рабочие органы с захватными устройствами совершать возвратные движения, благодаря чему создается предпосылка для изменения положения застрявшей заготовки (функция вибратора).
В БЗУ с механическим приводом применяют такие же устройства, как и в дисковом (см. рис. 1). В других случаях решения могут быть иными: в вибрационных БЗУ — это привод, создающий колебательное движение органов; в пневмовихревом — это воздух, оказывающий силовое воздействие на застрявшую заготовку; в щелевых – подпружиненные собачки и др. Так или иначе, функция самовосстановления работоспособности БЗУ очень важна, и конструктор должен обращать на это особое внимание.
При работе БЗУ обязательно возникают моменты, когда принимающий заготовки лоток переполнен и необходимо прекратить выдачу заготовок в лоток. В этом случае БЗУ может быть остановлено (такой вариант эксплуатации встречается чрезвычайно редко).
Если БЗУ остановить нельзя, возможны следующие варианты:
а) заготовки остаются в захватных органах, совершают в них движение и после освобождения места в лотке выдаются (см. рис. 14, д);
б) заготовки остаются в захватных органах, но вследствие работы амортизатора-вибратора захватные органы находятся в постоянной готовности выдавать заготовки в лоток (см. рис. 2);
в) заготовки транспортируются мимо лотка-магазина и удаляются из захватных органов в бункер (см. рис. 14, е);
г)заготовки транспортируются мимо лотка и удаляются в запасную тару вне бункера (см. рис. 1).
Наиболее распространены варианты функционирования а и б, а менее — вариант г.
В современных БЗУ могут выполняться дополнительные действия. Так, например, стремление повысить производительность привело к созданию многоручьевых, многозаходных, многоканальных БЗУ, в которых захват заготовок осуществляется в один или несколько потоков. Но ориентирование выполняется в устройствах с меньшей производительностью и приходится ставить несколько ориентирующих устройств. В этих случаях в БЗУ возникает необходимость разделить поток заготовок на несколько ориентирующих устройств, после которых все заготовки опять собираются в единый поток (функция суммирования).
Дата добавления: 2015-04-18; просмотров: 735; Мы поможем в написании вашей работы!; Нарушение авторских прав |