КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Вопрос №14. Рабочий процесс плоских решет зерноочистительных машин. Графики скоростей и ускорений грохота. Скорость перемещения материала по ремонту.
Механизм грохота (рисунок 1) состоит из пяти звеньев: 1 - кривошипа ОА, совершающего вращательное движение; 2 - ползуна А, совершающего возвратно-поступательное движение по кулисе; 3 - коромысла АВС, совершающего качательное движение вокруг шарнира В; 4 - шатуна СD; 5 - ползуна D, совершающего возвратно-поступательное движение; а также семи кинематических пар.
Рисунок 1 - Схема рычажного механизма
Определение степени подвижности механизма
Степень подвижности механизма определяется по формуле Чебышева:
W = 3n - 2P5 - P4, (2.1)
Где n - число подвижных звеньев для механизма, n =5;
Р5 - число кинематических пар V класса, Р5 = 7;
Р4 - число кинематических пар IV класса, Р4 = 0.
Подставляя числовые значения, получим:
W = 3·5 - 2·7 - 0 = 1.
Следовательно, степень подвижности механизма, показывающая число ведущих звеньев в исследуемом механизме, равна 1. Это значит, что для работы механизма достаточно одного ведущего звена.
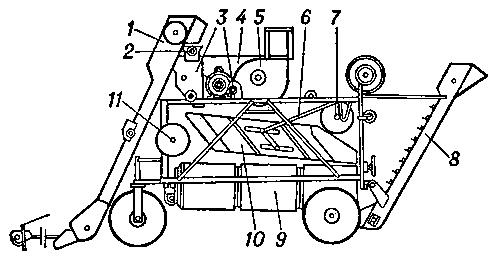
Машина ОС-4, 5А (рис. 1) имеет воздушноочистительную часть, решётный стан, 2 триера, загрузочный и отгрузочный транспортёры. Рабочие органы её приводятся в действие от электродвигателя мощностью 5,5 квт. Зерновой материал, поданный в приёмную камеру загрузочным транспортёром, последовательно обрабатывается в аспирационных каналах воздушноочистительной части и на решётах, затем шнеком направляется в овсюжный триер, а из него в кукольный триер. Очищенное зерно ссыпается на отгрузочный транспортёр, лёгкие отходы собирают в мешки, остальные падают на землю. Производительность машины до 4,5 т/ч. Машина ОВП-20 (рис. 2) имеет 2 решётных стана, воздушноочистительную часть, загрузочный и отгрузочный транспортёры, механизм самопередвижения, 3 электродвигателя мощностью 10,8 квт для привода рабочих органов и механизма самопередвижения. При перемещении машины вдоль бунта со скоростью 0,1— 0,3 м/мин загрузочный транспортёр подаёт зерно в приёмную камеру, из которой оно поступает в аспирационные каналы и подвергается воздействию воздушного потока. Лёгкие примеси, выделенные из зерна, уносятся воздухом по трубопроводу из машины; зерно поступает на решётные станы для очистки от крупных и мелких примесей. Очищенное зерно выводится из машины шнеком и транспортёром. Примеси удаляет пневмотранспортёр. Производительность машины 10—20 т/ч. В хозяйствах применяют также машину ОВВ-20, в которой примеси выделяются воздушным потоком. Зарубежные сложные З. м. имеют аналогичную технологическую схему и снабжены решётами, вентиляторами, триерами.
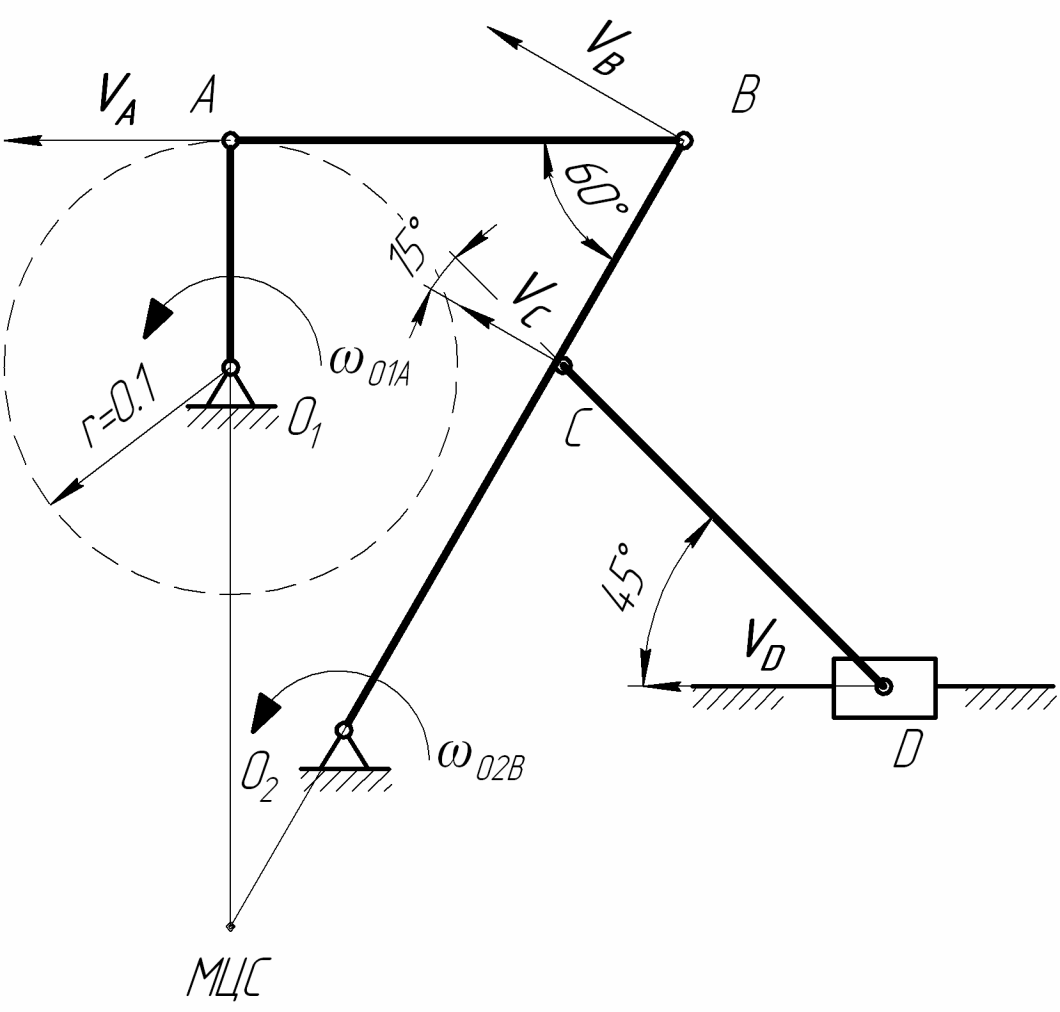
адача 8.3 В механизме качающегося грохота (рис.8.3) определить угловую скорость кривошипа О2В=3r и скорость ползуна D при вертикальном положении кривошипа O1A, если АВ=CD=2r. Отношение BC/CO2=3/5, угловая скорость кривошипа О1А равна ω=6 рад/с, углы α=60є, β=45є. Длина кривошипа O1A равна r=0.1м.

O1A=r=0,1 м
AB=CD=2r=0,2 м
O2B=3r=0,3 м

ωOA1=6 рад/с
α=60є
β=45є
ωO2B, VD - ?
Построим положение механизма в соответствии с данными условиями задачи.
Для определения необходимых нам скоростей необходимо провести ряд промежуточных вычислений.
Определим скорость VA
VA=ωO1A·r/2=6·0,1=0,6 м. с (VA┴O1A)
Скорость VA определяем с помощью теоремы о проекциях скоростей двух точек тела (стержня АВ) на прямую соединяющую эти точки (прямая АВ).
VA=VBcos30 → VB=0.6/cos30=0,69 м/c2
Построим мгновенный центр скоростей (МЦС) - точка лежащая на пересечении перпендикуляров к векторам VA и VB
Определяем VD. Точка D принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно и стержню CD. Поэтому чтобы найти ее скорость достаточно знать скорость какой-нибудь другой точки этого стержня и направление VD.
Величину VC найдем из пропорции
VC= 
Скорость VD определяем с помощью теоремы о проекциях скоростей двух точек тела (стержня CD) на прямую соединяющую эти точки (прямая CD).
VDcos45=VCcos15 → VD=0,5·cos15/cos45=0,68 м/c2
Дата добавления: 2015-04-18; просмотров: 493; Мы поможем в написании вашей работы!; Нарушение авторских прав |