КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Лекция 3. Продифференцируем (3) по обобщенной координате:
Продифференцируем (3) по обобщенной координате:
 (5)
(5)
Продифференцируем (2) по обобщенной координате:

Если необходимо определить функции положения центра масс, то вы делим векторный контур ABS2
 Условие замкнутости данного векторного контура имеет вид:
Условие замкнутости данного векторного контура имеет вид:

 (6)
(6)
 (7)
(7)
Продифференцируем (7) по обобщенной координате и получим аналоги линейных скоростей точек S2 в проекциях на оси х и у:
 (9)
(9)
Глава 2. Анализ машинного агрегата.
В данной главе будут рассмотрены следующие вопросы:
1. Силы и моменты, действующие в машинном агрегате.
2. Переход от расчетных схем машинных агрегатов к динамическим моделям.
3. Расчет усилий в кинематических парах основного механизма рабочей машины.
4. Определение законов движения главного вала (входного звена) рабочей машины под действием приложенных сил и моментов при различных режимах работы машинного агрегата.
§2.1 Силы и моменты, действующие в машинном агрегате.
2.1.1 Движущиеся силы и моменты Fд и Мд.
 Работа движущих сил и моментов за цикл положительна: Ад>0.
Работа движущих сил и моментов за цикл положительна: Ад>0.
Цикл – промежуток времени, по истечению которого все кинематические параметры принимают первоначальное значение, а технологический процесс, происходящий в рабочей машине, начинает повторяться вновь.
2.1.2 Силы и моменты сопротивления (Fс,Mс).
Работа сил и моментов сопротивления за цикл отрицательна: Аc<0.
2.1.3 Силы тяжести (Gi).
Работа силы тяжести за цикл равна нулю: АGi=0.
2.1.4 Расчетные силы и моменты (ФSi,MФi).
ФSi,MФi – Главные векторы сил инерции и главные моменты от сил инерции.
2.1.5 Реакции в кинематических парах (Qij).
§2.2 Понятие о механических характеристиках.
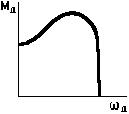
Механическая характеристика 3-х фазного асинхронного двигателя.
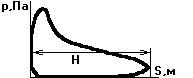
Индикаторная диаграмма ДВС

H – ход поршня в поршневой машине
(расстояние между крайними
положениями поршня)

Индикаторная диаграмма насоса
Как правило, из паспорта известен диаметр поршня, по нему можно определить площадь Sп= p.d2/4, тогда сила: F=p.Sп
Правило знаков сил и моментов:
· Сила считается положительной, если она по направлению совпадает с направлением движения того звена, к которому эта сила приложена.
· Момент считается положительным, если его направление совпадает с направлением угловой скорости вращения данного звена.
Имея механическую характеристику поршневой машины и учитывая правило знаков, то можно перестроить в график сил (см. лабораторную работу №4).
Основной вывод:
В течение всего цикла работы поршневой машины сила, приложенная к поршню, будет изменяться как по величине, так и по направлению, это в свою очередь приводит к колебаниям угловой скорости главного вала рабочей машины.
§2.3 Понятие о расчетной схеме машинного агрегата и переход от нее к динамической модели.
На расчетной схеме машинного агрегата отмечают основные силовые факторы, действующие в машинном агрегате; основные массы звеньев, влияющих на закон движения машинного агрегата; и основные жесткости валов. На рис.5-92 показан переход от реальной схемы к расчетной схеме (а) и от нее к динамической модели.
Из множества масс выделены 3 основные, оказывающие самое большое внимание на закон движения.
Расчетная схема (б) – 3-х массовая динамическая модель.
Для описания закона движения 3-х массовой динамической модели необходимо 3 дифференциальных уравнения.
Если положить жесткость с1  , то можно перейти к двумассовой модели (необходимо 2 диф. уравнения).
, то можно перейти к двумассовой модели (необходимо 2 диф. уравнения).
Если положить жесткость с2 , то получим одномассовую динамическую модель (рис. 2.3).

Рис. 2.3
Можно иметь 2 вида одномассовых динамических моделей:
1. Если звено приведения совершает вращательное движение, то одномассовая модель имеет вид

закон движения должен быть один,
поэтому wм = w1 , jм = j1
Уравнение движения можно записать одним уравнением, в виде изменения кинетической энергии:


2.  Если звено приведения совершает поступательное движение, то одномассовая модель имеет вид:
Если звено приведения совершает поступательное движение, то одномассовая модель имеет вид:

Этот вид рассматривать не будем.
§2.4 Приведение сил и масс к одномассовой динамической модели.
 j1 – обобщенная координата.
j1 – обобщенная координата.
Нужно определить закон движения 1-го
звена данного механизма.
Дано: j1, w1, lAB, lBC, lBS2, G2, G3, F3, IS1, IS2.
Определить, как изменяется w1.
 |
При переходе от расчетной схеме к одномассовой механической модели за звено приведения, как правило, принимают то звено, закон движения которого определяют.
Звено приведения – зв.1; изобразим одномассовую модель:
2.4.1 Приведение масс.
При переходе от расчетной схемы к модели необходимо обеспечить равенство кинетической энергии звена приведенной модели и реального механизма:
ТМод = ТМех .
Кинетическая энергия модели должна быть равна кинетической энергии сего механизма.
Тмод = Тпост + Твращ

Дата добавления: 2015-02-09; просмотров: 302; Мы поможем в написании вашей работы!; Нарушение авторских прав |