КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ЛЕКЦИЯ 6.
2.8.3 Краткие сведения по определению КПД (h) машинного агрегата.
 КПД машинного агрегата равен отношению работы сил полезного сопротивления к работе движущих сил за цикл установившегося режима.
КПД машинного агрегата равен отношению работы сил полезного сопротивления к работе движущих сил за цикл установившегося режима.

 |
а) определение КПД при последовательном соединении механизмов.
Pвход = Рд

б) определение КПД при параллельном соединении механизмов.
 |
где bi – коэффициенты распределения мощности.
b1 + b2 + b3 +… + bm = 1
Каждый b определяется назначением специалиста.
Глава3. Основные сведения о виброзащите машинного агрегата.
Вибрации нашли полезные применения в технике. Примерами этого являются различные вибромассажеры, вибротранспортеры и т.д. Однако работа с инструментом, основанном на вибрации, приводит к профессиональным травмам и заболеваниям. Основные мероприятия, связанные с выявлением источника вибрации, с целью последующего снижения его виброактивности или полного его устранения, называют виброзащитой.
Виброзащита осуществляется по следующим основным направлениям:
1. Уменьшение активности источника с помощью статического уравновешивания механизмов (полного или частичного), а также уравновешивания роторов.
2. Изменение конструкции объекта: установка гасителей колебаний, демпферов, виброизоляторов.
§3.1 Статическое уравновешивание рычажных механизмов.
 Если
Если  , то такой механизм называется статически уравновешенным.
, то такой механизм называется статически уравновешенным.
Если  , то такой механизм называется моментно-уравновешенным.
, то такой механизм называется моментно-уравновешенным.
Рассмотрим случай, когда необходимо уравновесить статически,
т.е. . Этого можно добиться только тогда, когда  , т.к.
, т.к.
 S à A
S à A
Когда центр масс совмещен с А, то он становиться неподвижным. Этого добиваются с помощью двух противовесов, один из которых устанавливается на продолжении шатуна, а другой на продолжении кривошипа.
Для того чтобы рассчитать массы противовесов, применяют метод замещающих масс, суть которого заключается в том, что масса каждого звена условно разноситься по двум точкам. При этом должны выполняться следующие условия:
 разнесем массу этого звена по точкам А и В так, чтобы положение центра масс не изменилось.
разнесем массу этого звена по точкам А и В так, чтобы положение центра масс не изменилось.
m = mA + mB
lAB = lAS + lBS
mA lAS = mB lBS
Сосредоточим массу 3-го звена в т.С

 Массу 2-го звена разнесем по шарнирам В и С. Если на продолжении звена 2 поставить противовес массой mпр2 и на расстоянии от т.В равное lпр2, то центр масс звеньев 2 и 3 переместиться в т.В, при этом
Массу 2-го звена разнесем по шарнирам В и С. Если на продолжении звена 2 поставить противовес массой mпр2 и на расстоянии от т.В равное lпр2, то центр масс звеньев 2 и 3 переместиться в т.В, при этом
mпр2.lпр2 = (m2C + m3C).lBC
При этом либо задаются массой противовеса и определяют lпр2, либо задаются lпр2 и определяют массу противовеса.
mпр1.lпр1 = (m1B + mпр2+ m2В+ m2C+ m3C).lAB
 |
После всех указанных мероприятий, центр масс переместиться в точку А, однако невсегда конструктивно возможно установить противовес на продолжении шатуна и ограничиваются установкой противовеса на звене 1. В этом случае центр масс системы смещают на линию АС, и этот центр масс перемещается с постоянным ускорением: а = const
В этом случае механизм – частично статически уравновешанный, его нежелательно устанавливать на высоком фундаменте, т.к. главный вектор сил инерции создает опрокидывающий момент, что недопустимо.
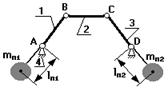 В четырехшарнирном механизме центр масс системы разноситься по точкам А и D, а противовесы устанавливаются на продолжении звеньев 1 и 3.
В четырехшарнирном механизме центр масс системы разноситься по точкам А и D, а противовесы устанавливаются на продолжении звеньев 1 и 3.
§3.2 Балансировка ротора (лаб. раб. №9).
Ротор – тело любой геометрической формы, имеющее свое основное движение – движение вращения (коленвал, колесо турбины и т.д.).
Пусть в силу каких-либо причин центр масс ротора смещен от оси вращения О на постоянную величину е.
1. w=0 à на опоры действует только сила тяжести G=mg.
2. w=соnst

 1) 2)
1) 2)
 Если заменить воздействие опоры реакцией и записать условие статического равновесия (по Даламберу):
Если заменить воздействие опоры реакцией и записать условие статического равновесия (по Даламберу):
Из рассмотрения данного треугольника следует, что при вращении ротора на его опоре возникает знакопеременная нагрузка Q12, которая достигает максимума, когда ФS и G направлены вниз, и минимума, когда эти вектора направлены по вертикали в разные стороны.
Состояние ротора , характеризующегося таким распределением масс, при котором на его опорах возникает знакопеременная нагрузка, называется неуравновешанностью ротора.
Причины вызывающие неуравновешанность ротора:
1. неточность изготовления ротора;
2. неточность сборки;
3. различные включения при отливке частей ротора;
4. перепады температур.
Мерой неуравновешенностью ротора является дисбаланс (  ) – вектор, направленный по ФS и отличающийся от него в w2 раз:
) – вектор, направленный по ФS и отличающийся от него в w2 раз:

 ,[г.мм]
,[г.мм]
Для того чтобы определить величину и направление D, в рассмотрение вводят плоскость дисбаланса, в которой этот вектор расположен, и угол дисбаланса.
Мероприятие, связанное с определением величины и направления D, с целью его последующего уменьшения, называется уравновешиванием ротора.
Существуют 3 вида неуравновешанности:
1. статическая;
2. моментная;
3. динамическая (общий случай).
Дата добавления: 2015-02-09; просмотров: 246; Мы поможем в написании вашей работы!; Нарушение авторских прав |