КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Решение. 1. Согласно условию

Критерии, приводящие к отношению правдоподобия. Обозначим через PN вероятность того, что сигнал на выходе оптимального фильтра представляет собой только реакцию на помеху, а через PX+N — вероятность того, что в нем содержится еще и отклик на полезный входной сигнал. Тогда вероятность ошибочного решения

Естественно, что условный „идеальный наблюдатель", принимающий решения, либо вообще не должен совершать ошибок, либо должен свести до минимума их вероятность. Поэтому критерий

называется критерием идеального наблюдателя. Он является частным случаем критерия минимума среднего риска, в котором учитывается значимость или стоимость ошибок каждого вида:

Заменяя PIна 1 — P0 и выполняя преобразования, тот и другой критерии можно представить в общем виде:

Последнее выражение минимизируется при

что вполне понятно, так как вероятность правильного обнаружения желательно иметь возможно большую, а вероятность ложной тревоги возможно меньшую.
Полученное выражение может рассматриваться самостоятельно и называется критерием взвешенной (с помощью g) комбинации (из двух слагаемых).
Для того, чтобы вывести из критерия взвешенной комбинации значение Wopt введем в рассмотрение функцию решения

с помощью, которой выражения для вероятности правильного обнаружения и вероятности ложной тревоги запишутся в виде:
где значения интегралов на участке изменения переменной от — ∞ до неоптимального пока еще порога W0 равны нулю.
Критерий взвешенной комбинации можно тогда представить в виде
 p0 (W) F(W) (L - g) dW = max,
p0 (W) F(W) (L - g) dW = max,
где L =  называется отношением правдоподобия.
называется отношением правдоподобия.
 В подынтегральном выражении с порогом обнаружения связана только функция решения. Следовательно, максимизировать интеграл можно только за счет выбора этой функции. Но она имеет всего два значения: 0 и 1. Поэтому поступим следующим образом. Принимая во внимание, что плотность распределения вероятностиp0 (W) всегда положительна, будем придавать функции решения F(W) значение 0, если разность L — g отрицательная, и значение 1, если эта разность положительная. В этом случае, очевидно , значение интеграла
В подынтегральном выражении с порогом обнаружения связана только функция решения. Следовательно, максимизировать интеграл можно только за счет выбора этой функции. Но она имеет всего два значения: 0 и 1. Поэтому поступим следующим образом. Принимая во внимание, что плотность распределения вероятностиp0 (W) всегда положительна, будем придавать функции решения F(W) значение 0, если разность L — g отрицательная, и значение 1, если эта разность положительная. В этом случае, очевидно , значение интеграла
будет максимальным, а оптимальное правило решения запишется в виде
ì0 при L£g
Fopt (W) í
î1 при L>g
Дальнейшее зависит от того, что представляет собой отношение правдоподобия. С одной стороны; как отношение двух плотностей вероятности оно не может быть отрицательным. С другой стороны; конкретный его вид зависит от законов распределения вероятности сигнала на выходе оптимального фильтра при наличии и при отсутствии в нем отклика на полезный входной сигнал. Таким образом, в отличие от синтеза оптимального порога обнаружения по критерию Неймана — Пирсона здесь требуется знание р1 (W) в реальных условиях эксплуатации. На практика обычно корректируют порог по мере накопления необходимых сведений, либо задаются моделью сигнала на этапе проекти- рования средства измерений.
Пример 48. Реакция оптимального фильтра на помеху подчиняется нормированному нормальному закону распределения вероятности, а отклик на полезный входной сигнал равен 1. Определить оптимальный порог обнаружения при заданном значении у.
Решение. Отношение правдоподобия
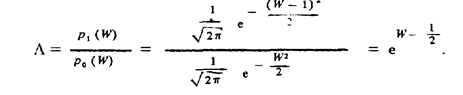
График этой функции построен на рис. 97, а. При L  g оптимальная функция решения Fopt (W) = 0, и принимается решение, что полезного сигнала нет. При L > g Оптимальная функция решения Fopt(W) = 1 принимается решение, что полезный сигнал есть (см. рис. 97, б) : Отсюда
g оптимальная функция решения Fopt (W) = 0, и принимается решение, что полезного сигнала нет. При L > g Оптимальная функция решения Fopt(W) = 1 принимается решение, что полезный сигнал есть (см. рис. 97, б) : Отсюда
Теория статистических решений используется также при контроле.
* В примерах 24. . .28 предполагается, что остальными факторами, влияющими на результат измерения, можно пренебречь.
Дата добавления: 2015-02-10; просмотров: 251; Мы поможем в написании вашей работы!; Нарушение авторских прав |