КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ИНДУКТОРНОЙ МАШИНЫ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ БЕСПОДШИПНИКОВОЙ
Обозначены преимущества бесподшипниковых машин. Построены аналитическая модель бесподшипниковой индукторной машины и модель методом конечных элементов. Определены зависимости радиальных сил от перемещений ротора и токов в обмотках двигателя, а также момента от угла поворота ротора.
Ключевые слова: бесподшипниковая индукторная машина, математическая модель, магнитная проводимость, радиальные силы, момент.
В настоящее время в некоторых специфических областях электропривода используются двигатели и генераторы с подвесом роторов в активных магнитных подшипниках (АМП) [1]. Магнитные силы притяжения, действующие на ротор со стороны электромагнитов, управляются с помощью электронной системы управления. Такая система естественно дороже обычных шарикоподшипников, однако она позволяет получить ряд неоспоримых преимуществ: практически неограниченный ресурс; снижение расходов на обслуживание; малый коэффициент трения; малая отдача теплоты в окружающую среду; возможность работы на высоких скоростях, в вакууме, при низких и высоких температурах, в условиях агрессивных сред, в сверхчистых технологиях; возможности создания контролируемых микроперемещений ротора в зазоре, системы активного гашения колебаний ротора; вращение ротора вокруг оси инерции (самоцентрирование ротора) и отсутствие вибраций вследствие дисбаланса; отсутствие шума и вибраций; контроль нагрузки на подшипники, положения ротора, дисбаланса и балансировки ротора. Данные преимущества позволяют использовать их во многих отраслях промышленности с достижением значительного экономического эффекта.
Развитием АМП является бесподшипниковая электрическая машина (БЭМ). Идея БЭМ состоит в том, чтобы объединить электродвигатель и АМП в одной машине. В этом случае в зазоре должно действовать такое электромагнитное поле, при взаимодействии которого с ротором возникали бы как вращающий момент, так и управляемые радиальные силы. Это позволяет уменьшить длину ротора, что главным образом сказывается на увеличении критических скоростей и расширении диапазона частот вращения, а также улучшении массово-габаритных показателей по сравнению с использованием АМП.
Существуют различные варианты исполнения БЭМ на основе электродвигателей различных типов: асинхронные двигатели, двигатели с постоянными магнитами, индукторные и другие, в которых нет механического контакта между статором и ротором. Описание их конструкции изложено в [2]. Каждый тип двигателя имеет как свои преимущества, так и недостатки. К преимуществам индукторного двигателя можно отнести простоту в изготовлении (в отличие от двигателей с постоянными магнитами), температурнонезависимыми (в отличие от двигателей с постоянными магнитами, в которых меняется магнитная проводимость от температуры и асинхронных, в которых меняется электрическая проводимость ротора). Однако индукторные двигатели обычно обладают меньшим значением КПД по сравнению с двигателями на постоянных магнитах.
В Псковской Инженерной Компании совместно с ОАО «Электропривод» г. Киров разработана бесподшипниковая индукторная машина (БПИМ) оригинальной конструкции.
Разрез данной бесподшипниковой индукторной машины представлен на рис. 1.

Рис. 1. Разрез бесподшипниковой индукторной машины
Обмотки привода располагаются в малых пазах статора.
Все секции обмотки привода включаются последовательно, согласно или встречно, в зависимости от направления потоков возбуждения, так чтобы наводимые в них МДС складывались.
При смене полярности тока в обмотке привода, изменяется поле, создаваемое этой обмоткой, а, следовательно, и распределение МДС под зубцами, что приводит к созданию вращающего момента.
Статор БЭМ имеет 16 полюсов, ротор – 8 полюсов. Статор имеет 5 однофазных обмоток: обмотка привода «m» и обмотки подвеса x1, x2, y1, y2. Обмотку привода образуют 16 катушек привода с числом витков  каждая и с одинаковым током
каждая и с одинаковым током  и МДС
и МДС  .
.
Подвес ротора в направлении оси x осуществляют обмотки x1 и x2, в направлении оси y – обмотки y1 и y2. Каждая из этих обмоток образована двумя катушками, намотанными на пару соседних полюсов с ws витками. Токи в обмотках подвеса  ,
,  ,
,  ,
,  создают МДС
создают МДС  ,
,  ,
,  ,
,  . МДС катушек одной обмотки
. МДС катушек одной обмотки
имеют противоположное направление. Зубцовая полярность этих МДС:
N-N-N-N-S-S-S-S-….
Для всестороннего изучения и исследования данной машины необходимо получить для нее адекватную математическую модель.
Связь потокосцеплений обмотки привода  и обмоток подвеса
и обмоток подвеса  ,
,  ,
,  ,
,  с токами в обмотках привода и подвеса , , , выражается через матрицу индуктивностей L:
с токами в обмотках привода и подвеса , , , выражается через матрицу индуктивностей L:
 , (1)
, (1)
или
 ,
,
где  ,
,  – векторы-столбцы потокосцеплений и токов соответственно.
– векторы-столбцы потокосцеплений и токов соответственно.
Для получения математической модели требуется найти выражения для самоиндуктивностей  ,
,  ,
,  ,
,  ,
,  и взаимоиндуктивностей
и взаимоиндуктивностей  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
Определение зависимостей индуктивностей от положения ротора. Схема замещения магнитной цепи БПИМ приведена на рис. 2.
На рис. 2  ,…,
,…,  – магнитные потоки через полюса,
– магнитные потоки через полюса,  , …,
, …,
 – магнитные проводимости под полюсами.
– магнитные проводимости под полюсами.
Используя метод двух узлов, по которому магнитный поток через k-й полюс равен:
 , (2)
, (2)
где  - МДС k-й ветви, A;
- МДС k-й ветви, A;  - магнитный потенциал
- магнитный потенциал
между узлами «a» и « b», A;  - суммарная проводимость всех зазоров, Гн.
- суммарная проводимость всех зазоров, Гн.
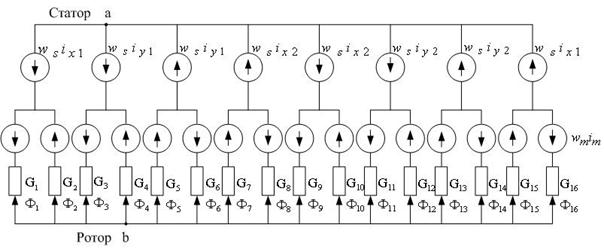
Рис. 2. Схема замещения магнитной цепи БПИМ
Для определения самоиндуктивности обмотки привода найдем потоки  и примем ток
и примем ток  , а токи
, а токи  .
.
Тогда собственная индуктивность обмотки привода вычисляется как:

 (3)
(3)
Определив потоки по (2) и подставив их в (3) получим:


Аналогично определяются остальные индуктивности.
Для определения индуктивностей необходимо знать магнитные проводимости зазоров при различных положениях ротора.
Расчет проводимостей воздушных путей потока можно выполнить по приближенным формулам приведенным в [3].
Для двух перпендикулярных поверхностей:  ,
,
где а - ширина проводящего материала, м; b - длина, м; g - расстояние между поверхностями, м;  Гн/м - магнитная постоянная. Для двух параллельных поверхностей:
Гн/м - магнитная постоянная. Для двух параллельных поверхностей:  .
.
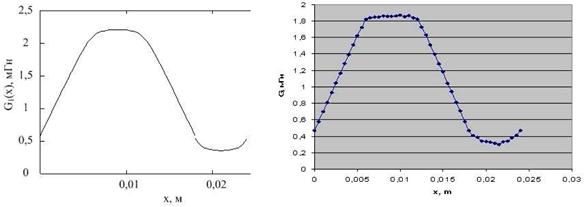
Используя формулы, приведенные выше получена зависимость магнитной проводимости от смещения ротора относительно статора  (рис. 3, а)). Значения длины ротора
(рис. 3, а)). Значения длины ротора  =0,07 м, высоты воздушного зазора g=0,0003 м, ширины зубца tп=0,006 м
=0,07 м, высоты воздушного зазора g=0,0003 м, ширины зубца tп=0,006 м
Максимальная проводимость вычисляется по формуле:
 .
.
Минимальная проводимость вычисляется по формуле:
 .
.
Зависимость  весьма близка к косинусоиде:
весьма близка к косинусоиде:
 . (4)
. (4)
Для оценки полученных результатов было проведено моделирование проводимости методом конечных элементов в программной среде FEMM (рис. 3, б).
А б
Рис. 3. Зависимости магнитной проводимости от смещения ротора
Как видим, результаты расчетов различными методами весьма схожи. Для дальнейших расчетов аппроксимируем зависимость косинусоидой (4).
Примем данную аппроксимацию к описанию проводимостей всех 16 полюсов. Учитывая, что зависимость величины зазора от углового положения и смещения ротора по осям х и у имеет вид [2]:  , получим следующее выражение для максимальной проводимости k-го зубца статора:
, получим следующее выражение для максимальной проводимости k-го зубца статора:

Учитывая аппроксимацию зависимости проводимость от угла поворота ротора косинусоидой, можно записать функцию  :
:
 .
.
Таким образом определены зависимости собственных и взаимных индуктивностей всех обмоток от радиального смещения и угла поворота ротора.
Определение вращающего момента и радиальных сил. Вращающий момент и радиальные силы БПИМ можно найти как частные производные от магнитной энергии по углу поворота ротора и радиальным смещениям.
Магнитная энергия находится по соотношению:  . Учитывая то, что БПИМ представляет собой систему из пяти токовых контуров и используя выражение (1) можно записать:
. Учитывая то, что БПИМ представляет собой систему из пяти токовых контуров и используя выражение (1) можно записать:
 . (5)
. (5)
Раскрывая выражение (5) получим:



 . (6)
. (6)
Здесь первая строка описывает магнитную энергию самоиндуктивностей, вторая строка – энергию взаимных индуктивностей обмотки привода и обмоток подвеса, третья и четвертая строки – энергию взаимных индуктивностей между обмотками подвеса. Подставляя полученные выражения индуктивностей в (6) определяем магнитную энергию системы:
 .
.
Вращающий момент определяется как частная производная магнитной энергии W по углу вращения  :
:
 . (7)
. (7)
Радиальные силы Fx и Fy определяются как частные производные магнитной энергии по x и y соответственно:
 ,
,  . (8)
. (8)
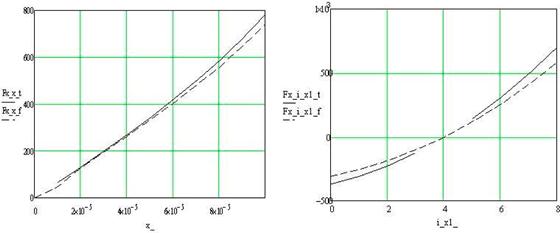
Сравнение полученных результатов. В ходе работы была построена модель электромагнитной системы БПИМ в среде моделирования методом конечных элементов FEMM.
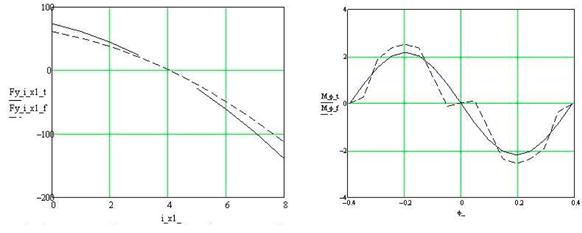
В ходе ее исследований были получены следующие зависимости:
а) силы по оси х_ от смешения ротора по оси х 
б) силы по оси х от тока в 1-й обмотке подвеса  ;
;
в) силы по оси y от тока в 1-й обмотке подвеса  ;
;
г) момента от угла поворота ротора  .
.
Для оценки адекватностей моделей построим данные зависимости используя данные модели, рассчитанной методом конечных элементов и модели, рассчитанной аналитически по (7) и (8) в среде Mathcad:  ,
,  ,
,  ,
,  . На рис. 4 показаны эти зависимости.
. На рис. 4 показаны эти зависимости.
Из рис. 4 (а) видно, что на незначительных перемещениях ротора зависимость имеет практически линейный характер, причем результаты моделирования аналитическим методом и в среде FEMM практически полностью совпадают.
Из рис. 4 (б - в) видно, что, результаты моделирования различными иетодами качественно совпадают. Завышенные результаты силы в аналитической модели объясняются пренебрежением индуктивностями рассеяния.
Из рис. 4 (г) видно, что полученные моменты также практически полностью совпадают.
Данная модель позволяет получить зависимости радиальных сил и момента от токов в обмотках и положения ротора. Вычисляя командные силы в зависимости от положения ротора (например по закону ПИД – регулирования) и зная зависимости сил от токов, можно рассчитать командные токи средствами вычислительной техники (в качестве вычислительного устройства может служить контроллер). В усилителях мощности формируются токи, необходимые для удержания ротора в центральном положении.
| |
| а | б |
| |
| в | г |
Рис. 4. а) зависимости силы по оси х от смешения ротора по оси х;
Дата добавления: 2015-04-16; просмотров: 310; Мы поможем в написании вашей работы!; Нарушение авторских прав |