КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Глава 12
БЕРЕГОВЫЕ РАДИОЛОКАЦИОННЫЕ СТАНЦИИ
ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ УПРАВЛЕНИЯ ДВИЖЕНИЯ
СУДОВ
Комплексное осуществление мероприятий по организации, регулированию и контролю за движением судов на базе соответствующих технических средств привело к созданию систем управления движением судов (СУДС), призванных обеспечить навигационную безопасность при максимально допустимой интенсивности движения, снизить аварийность и предупредить загрязнение водной среды, а также повысить технико-эксплуатационную эффективность работы флота и портов. Каждый час простоя судна в условиях ограниченной видимости или в ожидании лоцмана из-за плохой или несвоевременной информации приносит значительные убытки, как судовладельцу, так и целому ряду береговых организаций, вовлеченных в процесс обработки судна в порту. Сократить до минимума подобные простои, следовательно, и убытки могут и должны системы управления движения судов.
По своему назначению, организации и техническому оснащению СУДС могут быть самыми различными, начиная от пассивных первичных мероприятий по упорядочению движения судов и кончая активными системами, базирующимися на комплексе современных технических средств, включающих новейшие электронные средства наблюдения, связи и обработки информации.
В состав СУДС может входить одна или несколько базовых радио-локационных станций (подробнее о БРЛС см. подраздел 12.2 настоящей главы).
СУДС, как правило, состоит из центра управления движением (ЦУД) судов и одного или несколько постов управления движением (ПУД), связанных с центром каналами связи, по которым осуществляются управление техническими средствами постов, а также передача в ЦУД видеоинформации БРЛС и аудиоинформации радиостанций.
В настоящее время на базе современных навигационных и радиосвязных систем создаются новые перспективные СУДС, дополнительно включающие в себя дифференциальные станции спутниковых навигационных систем ГЛОНАСС/GPS и автоматические индификационные системы (АИС). С их использованием обеспечивается метровая точность определения места судна в зоне действия (до 100 км от диффстанции). Благодаря этому может достигаться высокоточная проводка судов по узким фарватерам. Благодаря высокоточному навигационному обеспечению может быть существенно повышена эффективность дноуглубительных и гидротехнических работ.
В соответствии с технико-эксплуатационными требованиями все СУДС подразделяются на 4 категории:
Высшая категория - региональные СУДС, обслуживающие обширные акватории, включающие в себя несколько портов с подходами, системами разделения движения судов, каналами, фарватерами.
1 категория - сложные высокоавтоматизированные СУДС, оборудованные специальными высокоточными техническими средствами наблюдения (с компьютерной обработкой информации) и связи, несколькими радиолокационными станциями, обслуживающие подходы и акватории крупных портов и каналы.
2 категория – СУДС, оборудованные специализированными БРЛС, близкими по характеристикам к судовым радиолокаторам с обработкой информации на уровне САРП.
3 категория - упрощенные СУДС, оборудованные средствами наблюдения и связи.
Разработка, установка и эксплуатация СУДС в каждой стране строго регламентирована и проводится в соответствии с требованиями резолюций IМО, рекомендациями и руководствами Международной Ассоциации маячных служб (МАМС), национальными нормативно-правовыми документами. Порядок проводки судов и выполнение капитанами судов обязательных требований или рекомендаций операторов СУДС доводится до мореплавателей через Извещения мореплавателям, Обязательные постановления по морским портам, руководства и пособия для плавания.
Учитывая мировой опыт использования СУДС на 20 сессии IMO, была принята Резолюция А.857(20) «Руководство для служб движения судов». Для координации действий в вопросах строительства и эксплуатации СУДС в 1980 году был создан Комитет служб движения судов при МАМС.
Каждая СУДС (включая оборудование, положения и инструкции, квалификацию штата) проходит сертификацию Морской Администрации. Проектирование СУДС выполняется морскими научными организациями, а ввод систем в эксплуатацию производится после проведения государственных испытаний и освидетельствования СУДС специально созданными комиссиями.
12.2. БЕРЕГОВЫЕ РАДИОЛОКАЦИОННЫЕ СТАНЦИИ
Несмотря на достаточно высокую эффективность судовых навигационных РЛС, они не во всех случаях обеспечивают безопасность плавания судов, особенно при большой интенсивности движения в узкостях, в условиях плохой видимости и других, сложных в навигационном отношении, условиях. Основными их недостатками является наличие мертвой зоны и ограниченные возможности для улучшения разрешающей способности по дальности и направлению. В связи с этим, для обеспечения безопасного плавания судов в районах с интенсивным движением (при подходах к портам, при плавании по рекомендованным курсам и фарватерам) в составе СУДС могут использоваться береговые радиолокационные станции (БРЛС).
БРЛС производят обзор заданной акватории порта и подходов к нему и обеспечивают информацией мореплавателей об их местонахождении и о расположенных в опасной близости от них надводных объектах. Увеличение разрешающей способности по направлению достигается уменьшением угла диаграммы направленности антенны в горизонтальной плоскости до 0,3 – 0,7°. Для получения такой диаграммы необходимо, как это следует из формулы
 ¸
¸  ,
,
где: g – ширина диаграммы направленности антенны;
l – длина волны;
D – размеры антенны,
применение антенн с большим размером горизонтального раскрыва (до 5 – 8 м), что в береговых условиях не представляет большой сложности. Повышение разрешающей способности по дальности до нескольких метров достигается применением очень коротких импульсов (длительностью 0.05 – 0,1 мкс). Высокая разрешающая способность БРЛС обеспечивает получение четкого изображения, более сходного с действительными очертаниями берегов, чем изображение на экране судовой РЛС. Кроме того, на экране БРЛС возможно воспроизведение электронным способом изображения существующих в данном районе визуальных створов, рекомендованных курсов, фарватеров. Это дает возможность более точно установить положение судна относительно линии створа или оси фарватера и передать эту информацию на борт судна.
В состав БРЛС входит один индикатор кругового обзора (ИКО) для наблюдения за всей акваторией в целом и до шести индикаторов секторного обзора (ИСО) для наблюдения за отдельными участками фарватера. Применение ИСО дает возможность обзора удаленных участков в крупном масштабе (1:1000 ¸ 1:15 000).
БРЛС применяются для обеспечения:
радиолокационной проводки судов по каналам и фарватерам в условиях ограниченной видимости;
оказания помощи при подходе к причалам, к месту якорной стоянки и съёмки с якоря;
регулирования плотности движения всех плавсредств по акватории порта и подходах к нему, а также для обеспечения безопасного расхождения встречных судов;
контроля за соответствием точек установки средств плавучего ограждения их штатным местам и выдачи информации о смещении знаков и состоянии навигационной обстановки в зоне станции;
оказания помощи при аварийных и спасательных работах;
предупреждения судов, курсы которых ведут к опасности.
БРЛС используются одиночно либо в группе, образующей целую береговую систему. Это дает возможность осуществить централизованное управление судов в зоне действия БРЛС. В разных портах главные функции БРЛС различаются. В одних портах они заключаются в проводке судов при плохой видимости, в других – в регулировании движением судов.
Технические требования к БРЛС определяются главным образом судоходными условиями в обслуживаемом районе и основным назначением БРЛС в порту. При групповом использовании БРЛС проводимое судно как бы передаётся от одной БРЛС к другой, находясь под постоянным наблюдением и получая необходимую информацию с берега.
БРЛС установлены более чем в 250 портах мира. В портах, где БРЛС нет, для проводки малотоннажных судов может быть использована РЛС судна, стоящего на якоре.
Важной задачей при проводке судна с помощью БРЛС является его опознавание на экране РЛС среди эхо-сигналов других судов и навигационных знаков. Для этого применяются различные способы.
1. По координатам, которые судно сообщает оператору БРЛС. Знание координат судна помогает оператору опознать эхо-сигнал судна на ИКО. Однако этот способ не всегда надёжен.
2. По отличительному манёвру (большему по величине, по кратковременному изменению курса либо циркуляции), в течение которого судно опознаётся по характерному перемещению эхо-сигнала на экране. Такой способ получил широкое распространение и применяется для опознавания судов, которые находятся на дальних подступах к порту в районах, свободных от навигационных опасностей и скопления судов. Этот способ требует относительно много времени.
3. С помощью портативных бортовых радиолокационных маяков-ответчиков, которые лоцман приносит с собой на судно. Включённый по требованию оператора маяк-ответчик излучает кодированные импульсы, которые принимаются БРЛС и показываются на ИКО в виде характерных меток, располагающихся за эхо-сигналом опознаваемого судна. Такой ответчик полностью решает задачу опознавания.
4. По радиопеленгу судна, полученному с помощью УКВ и визуального радиопеленгатора во время установления с ним радиотелефонного контакта. Способ прост и удобен. Недостаток этого способа заключается в том, что он дает одну линию положения, на которой могут находиться несколько судов.
Большое значение при проводке судна имеет документирование информации, передаваемой на судно. Для этого применяется магнитофонная или цифровая запись радиотелефонных переговоров и запись изображения с экрана с помощью видеозаписывающих устройств.
В качестве БРЛС могут применяться различные типы РЛС, выпускаемые различными фирмами. Так, в составе СУДС на Чёрном и Азовском море (Украина) в качестве основной или резервной БРЛС применяются РЛС «Наяда-5» (Россия), сопряженные с САРП «Бриз-Е» или модифицированной САРП «Панорама-СТ» (Украина), а также РЛС фирм «Norcontrol» (Норвегия), «Atlas Electronic» (Германия).
В настоящее время закончена разработка и осуществляется поставка современной береговой радиолокационной станции контроля надводной обстановки «Наяда-5ПВ» (Россия).
БРЛС «Наяда-5ПВ» - источник радиолокационной информации, предназначенный для использования:
в качестве автономного радиолокационного поста, обеспечивающего контроль надводной обстановки прибрежной акватории;
в качестве радиолокационного поста в составе автоматизированной береговой системы контроля надводной обстановки.
При применении БРЛС «Наяда-5ПВ» количество радиолокационных постов системы автоматизированного берегового контроля надводной обстановки ограничений не имеет и определяется только протяженностью охраняемой акватории. При расположении радиолокационных постов на расстоянии друг от друга до 20 миль обеспечивается надёжное перекрытие зон ответственности.
БРЛС «Наяда-5ПВ» работает в диапазоне частот 9430 МГц (l = 3,2 см). Дальность обнаружения надводной цели составляет 0,8 радиуса горизонта. Разрешающая способность по углу – 0,5 ± 1° в зависимости от варианта исполнения антенны. Разрешающая способность по дальности – 10 – 100 метров в зависимости от установленной шкалы дальности. Точность определения координат довольно высокая и составляет:
- по дальности – 10 метров;
- по углу – 0,3°.
Шкалы дальности: 0,25 – 64 мили.
В РЛС применена многофункциональная защита от преднамеренных пассивных и активных помех, в том числе поляризационная. Предусмотрена возможность излучения зондирующих импульсов только в секторе наблюдения.
Отличительной особенностью БРЛС «Наяда-5ПВ» является то, что имеются такие функции как «электронная лупа», «измерительная линейка», «охранная зона» и «охрана якорной стоянки». БРЛС сопрягается с системой отображения электронной карты, имеется возможность ввода стилизованной карты (250 линий). Предусмотрено документирование радиолокационной и служебной информации с выбираемым оператором интервалом документирования. Радиолокационная информация представляется в цветном изображении с эффективным диаметром радиолокационного изображения – 250 мм.
При работе в режиме САРП осуществляется автоматическое сопровождение до 50 целей с определением координат и параметров движения целей в относительных и географических координатах. Время непрерывной работы БРЛС не ограничено.
В состав комплекта БРЛС «Наяда-5ПВ» входит:
1. Прибор АП – антенно-приёмопередающее устройство. Следует отметить, что передатчик и приемник конструктивно расположен в антенном блоке в виде отдельного модуля. Это позволило исключить применения громоздких волноводных устройств и исключить потери мощности при передаче и приеме отраженных сигналов в волноводах.
Антенна, входящая в состав прибора АП, поставляется в одном из вариантов:
1.1. 0,35° однополяризационная (6900 мм);
1.2. 0,7° однополяризационная (3600 мм);
1.3. 0,35° двухполяризационная (6900 мм);
1.4. 0,7° двухполяризационная (3600 мм).
2. Прибор ЗП – устройство электропитания и защиты двигателя антенны
3. Комплект индикатора И-211:
3.1. пульт оператора с видеоконтрольным устройством;
3.2. вычислительный модуль;
3.3. источник бесперебойного питания.
12.3. ОСОБЕННОСТИ ПЕРЕДАЧИ ВИДЕОИНФОРМАЦИИ ПО КАНАЛУ
СВЯЗИ ОТ РЛС ПОСТА УПРАВЛЕНИЯ В ЦЕНТР УПРАВЛЕНИЯ
ДВИЖЕНИЯ
В разделе 12.1 было отмечено, что в состав СУДС, как правило, входит центр управления движением (ЦУД) судов и один или несколько постов управления движением (ПУД), связанных с центром каналами связи, по которым осуществляются управление техническими средствами постов, а также передача в ЦУД видеоинформации радиолокационными станциями и аудиоинформации радиостанций.
Для обеспечения точности определения места судна с помощью РЛС стараются повысить разрешающую способность станций по дальности, т.е. добиваются укорочения зондирующих импульсов РЛС. В современных РЛС сантиметрового диапазона наименьшая длительность зондирующих импульсов составляет 0,05 мкс. Для того чтобы передать такой импульс по каналу связи от РЛС поста управления к терминальному оборудованию лоцмана-оператора ЦУД требуется широкополосный канал связи. Чем короче импульс, тем «шире» должен быть канал связи. Так, для передачи импульса длительностью 0,05 мкс требуется полоса пропускания канала связи 20 МГц, а если использовать цифровой канал связи, то скорость передачи по европейскому стандарту должна быть 320 Мбит/с. Такого оборудования промышленность серийно не выпускает. Стандартные телефонные каналы имеют полосу пропускания 3100 Гц, а телевизионные – 6,5 МГц.
Стараясь улучшить эксплуатационные характеристики РЛС, создаются трудности в передаче безыскаженного импульса по каналам связи. Для того чтобы увязать высокие эксплуатационные параметры РЛС с каналом связи, необходимо воспользоваться положениями теории информации, т.е. увязать два понятия - объем сигнала vс и емкость канала vк :
tс = fс× mс,
где tс – время передачи;
fс – полоса спектра частоты;
mс – превышение сигнала над помехой.
vк = fк× tк× mк ,
где fк - ширина полосы частот, пропускаемой каналом;
tк - время использования канала;
mк - допустимое превышение сигнала над помехой.
vс < vк т.е. fс× tс× mс < fк× tк× mк .
Из приведенного неравенства видно, что "короткий" сигнал tс можно передать по узкополосному каналу fк, увеличив время занятости канала tк. Приведенным методом широко пользуются на практике.
Из теоретических основ радиолокации известно, что зондирующий импульс РЛС, излучённый антенной, проходит до цели и обратно со скоростью с » 300000 км/с. При работе РЛС короткими импульсами время между импульсами TИ составляет около 500 мкс, т.е. за 500 мкс импульс должен дойти до цели и вернуться обратно. Отсюда можно вычислить дальность обнаружения цели DЦ :


что составляет примерно 40 миль.
Как правило, необходимая дальность обнаружения целей в СУДС при работе РЛС короткими импульсами не превышает 10 морских миль. Таким образом, использовав на прохождение импульсов РЛС около 125 мкс, оставшееся время (350 мкс) можно использовать для передачи импульсов РЛС по каналу связи, т.е. увеличить время занятости канала в 3 раза, а следовательно, в соответствии с указанным неравенством можно уменьшить полосу пропускания канала в 3 раза.
Сокращая дальность обнаружения целей или увеличивая период следования зондирующих импульсов РЛС, можно добиться возможности передачи импульсов РЛС по стандартным телевизионным или телефонным каналам связи. Такой метод получил название «компандирование». Сущность его состоит в растягивании импульса во времени на передающем конце в «экспандере», передаче растянутого импульса по каналу связи и сжатии импульса в «компрессоре» до первоначальной длительности на приемном конце. Таким образом, отраженный от цели импульс РЛС, переданный по каналу связи рассмотренным методом, может быть без искажения воспроизведен на дисплее лоцмана-оператора ЦУД.
Каналы связи для СУДС организуются по радиорелейным линиям связи (РРЛ).
Различными фирмами выпускается множество радиорелейных станций (РРС) различных по мощности и диапазону частот: мощность станций примерно +15 дБ/м, в отдельных случаях ее увеличивают до +35 дБ/м; наиболее приемлемый диапазон частот для СУДС 2-7 ГГц. Только в этом диапазоне можно создать достаточное число каналов связи нужной полосы частот.
Необходимо также учитывать затухание сигнала в свободном пространстве при экстремальных метеорологических условиях (сильном дожде, мокром снеге), ибо в этом случае резко возрастает напряжение работы СУДС. При частоте 7 ГГц мощность затухания в осадках составляет 0,3 - 0,4 дБ/км, на частотах ниже 7 ГГц мощность затухания практически можно не учитывать.
Как правило, трассы РРЛ СУДС проходят над водной поверхностью. Они подвержены явлениям интерференции и рефракции.
Интерференция - это геометрическое сложение в точке приема прямого и отраженного от водной поверхности радиосигналов РРС. Наиболее часто это явление наблюдается при штилевой погоде. В точке приема наиболее опасно для связи положение, при котором прямой и отраженный сигналы приходят в противофазе. В этом случае суммарная мощность сигнала может падать до нуля, т.е. полностью прекращается связь.
Рефракция - это искривление «луча» из-за неоднородности строения тропосферы. Наиболее часто рефракция наблюдается на границе земной и водной поверхностей в утренние и вечерние часы из-за различной степени нагрева суши и воды. В этом случае «луч» выходит за пределы диаграммы направленности приемной антенны РРС.
Для борьбы с интерференцией и рефракцией чаще всего применяют метод приема сигнала на разнесенные по высоте антенны (сдвоенный прием). В этом случае явления интерференции и рефракции можно исключить или значительно ослабить.
Проблемы передачи сигналов РЛС по каналам связи являются важнейшими в эксплуатации СУДС и должны учитываться при их проектировании и строительстве соответствующими организациями.
12.4. ПУТИ УМЕНЬШЕНИЯ ВЛИЯНИЯ РЕЛЬЕФА МЕСТНОСТИ НА
РАЗМЕЩЕНИЕ АНТЕННЫХ ПОСТОВ БРЛС
Успешность работы РЛС в значительной степени зависит от рационального размещения антенных постов системы на местности с учетом ее рельефа и других затрудняющих прямое наблюдение фарватера обстоятельств. В связи с этим особенно актуальны работы по поиску путей уменьшения влияния указанных факторов на качество функционирования станций в составе СУДС.
При невозможности обеспечения незатененного обзора окружающего пространства с помощью одной РЛС (по условиям рельефа местности и при затенении препятствиями отдельных участков) в настоящее время устанавливаются дополнительные станции с автоматической, автоматизи-рованной или неавтоматизированной передачей данных обстановки на центральный пункт наблюдения с основной БРЛС, оборудованной устройством ввода принимаемой информации на ее индикатор. Основными недостатками такой системы наблюдения являются низкая оперативность и точность передачи данных неавтоматизированной системой, техническая сложность автоматизи-рованной или автоматической системы, а также трудности в их обслуживании. Необходимость использования дополнительных РЛС с круговым обзором значительно ухудшает экологическую обстановку в районе установки такой системы.
Рассмотрим способ формирования стационарной радиолокационной станции с беззатенённой зоной обзора окружающей поверхности. При этом способе сначала выявляют наличие в зоне обзора РЛС естественных препятствий, закрывающих находящееся за ними пространство. Затем размещают на вершинах указанных препятствий системы переотражателей или ретрансляторов радиолокационных сигналов, обеспечивающих переотражение прямых сигналов РЛС в сторону находящихся в области тени целей, а также переотражение отраженных целями сигналов в сторону антенны РЛС.
В системе переотражателей для переотражения сигналов РЛС используются металлические сферы и цилиндры. При облучении они обеспечивают переотражение сигналов РЛС в направлении от станции в сравнительно широком угле в вертикальной плоскости, в том числе в сторону расположенных в области тени целей. В системе ретрансляторов используются СВЧ-антенны, обеспечивающие прием и ретрансляцию сигналов РЛС в требуемом направлении (в частности, в область тени за препятствием), а также отраженных целями сигналов в сторону антенны РЛС.
Так как принципиальные схемы функционирования систем переотражателей и ретрансляторов идентичны, остановимся на описании функционирования только РЛС с системой переотражателей. На рис. 12.1 представлен боковой вид схемы функционирования РЛС с обеспечением просмотра зоны тени за препятствием.
На берегу установлена обычная РЛС обзора окружающей земной или водной поверхности 1. На дальности прямой видимости Rс1 находится видимая и наблюдаемая на экране РЛС цель 10. На расстоянии от антенны РЛС R расположена цель 2, которая закрыта от антенны РЛС высоким островом 3. Антенна РЛС с диаграммой направленности в вертикальной плоскости 4 имеет непосредственно за островом зону тени 5 протяженностью Rт от точки 6, в которой установлена система переотражателей.
 |



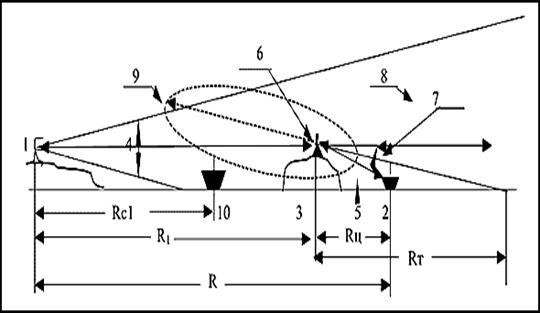
Рис. 12.1. Схема радиолокационной станции с обеспечением просмотра зоны тени за препятствием
При круговом вращении антенна РЛС облучает препятствие 3 и установленную на нем систему переотражателей 6. Элементы системы 6 рассеивают облучающее их электромагнитное поле РЛС в соответствии с диаграммой 8, в том числе и в область тени за препятствием 5. Рассеянное поле облучает расположенную в области тени цель 2. Отраженные целью 2 в сторону системы переотражателей 6 сигналы рассеиваются в соответствии с диаграммой 9 и рассеянным полем облучают антенну РЛС. Принятые антенной РЛС 1, отраженные закрытой целью, сигналы усиливаются приемником станции и воспроизводятся штатным способом на экране индикаторного устройства. Направление на обнаруженные закрытые цели определяют по положению антенны РЛС, расстояние до цели – по времени прохождения сигнала до закрытой цели и обратно.
Операторов РЛС обычно интересует дальность обнаружения различных целей при заданных параметрах станции. В рассматриваемом случае дальность расположения препятствия и установленной на нем системы переотражателей R1 определяется расположением РЛС относительно препятствия – величина постоянная. Переменной величиной является дальность обнаружения цели от системы переотражателей до цели Rц.
R = R1 + Rц
Эффективность переизлучения радиоволн переизлучателями в значительной степени зависит от отражающих свойств использованных в них конструкций. Эти свойства зависят от размеров конструкций, их конфигурации и направления облучения. Эффективность отражения характеризуют эффективной площадью отражения (ЭПО) и диаграммой рассеяния. При этом различают диаграмму обратного рассеяния и диаграмму рассеяния.
При определении диаграммы рассеяния передатчик неподвижен, а приемник движется вокруг цели. В нашем случае рассеяние поля системой переотражателей происходит под углом 180° относительно направления на РЛС. В этом направлении наблюдается значительное увеличение рассеяния.
Анализ характеристик переотражения тел различной конфигурации позволил сделать вывод о целесообразности использования в системах переотражателей проводящих сфер и цилиндров. Система ретрансляторов включает набор расположенных в линию отдельных ретрансляторов сигналов. Каждый ретранслятор состоит из двух антенн, соединенных своими входами-выходами c СВЧ-трактом с использованием усилителей сигналов или без них. Передняя антенна направлена на антенну РЛС и обеспечивает прием излучаемых ею сигналов и излучение в сторону РЛС сигналов, отраженных целью. Задняя антенна излучает в сторону закрытых целей оттранслированные сигналы и принимает отраженные целями сигналы. Коэффициент ретрансляции каждого ретранслятора без усилителей СВЧ составляет 0,9, с усилителями - до 25-100.
В таблице 12.1 приведены значения дальности обнаружения целей в области тени Rц (в км) для различных конструкций переотражателей и ретрансляторов, а также расстояний до препятствия R1. Характеристики РЛС соответствуют станции "Наяда-5".
Данные таблицы показывают, что при использовании в системе переотражателей и ретрансляторов различной конструкции имеется возможность наблюдения закрытых препятствием целей в широком диапазоне расстояний и обеспечения непрерывного наблюдения за надводными целями в зоне действия РЛС практически при любом рельефе местности.
Табл. 12.1

Стоимость и сложность таких систем зависит от размеров области тени и требуемой дальности обнаружения различных целей в этой области. Системы переотражателей дешевле в изготовлении и эксплуатации, но обладают меньшими дальностями обнаружения целей.
На рис. 12.2 представлен пример ис-  пользования РЛС с расширенной зоной обнаружения в речной диспетчерской системе на площади, имеющей зате-нённый островом участок плеса. На ост-рове установлена система переотра-жателей РР. Благодаря ее наличию обеспечивается непрерывное радиолока-ционное наблюдение за всей поверх-ностью реки в зоне действия диспет-черской РЛС, в данном случае – за дви-жением и состоянием судна С3.
пользования РЛС с расширенной зоной обнаружения в речной диспетчерской системе на площади, имеющей зате-нённый островом участок плеса. На ост-рове установлена система переотра-жателей РР. Благодаря ее наличию обеспечивается непрерывное радиолока-ционное наблюдение за всей поверх-ностью реки в зоне действия диспет-черской РЛС, в данном случае – за дви-жением и состоянием судна С3.
|
| Раздел II СУДОВЫЕ СРЕДСТВА АВТОМАТИЧЕСКОЙ РАДИОЛОКАЦИОННОЙ ПРОКЛАДКИ (САРП) Глава 13 Назначение и классификация САРП Глава 14 Технико-эксплуатационные требования к САРП Глава 15 Устройство и принцип работы САРП Глава 16 Основные типы САРП и характеристики их индикаторов |
Дата добавления: 2014-11-13; просмотров: 1065; Мы поможем в написании вашей работы!; Нарушение авторских прав |