КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Режимы работы и выбор электродвигателя
Несмотря на большое разнообразие рабочих механизмов их механические характеристики практически могут быть объединены в три группы. Первая группа характеризуется тем, что момент на валу электродвигателя остается постоянным при любой частоте вращения. К этой группе относятся подъемно-транспортные механизмы. Действительно, если кабина лифта заполнена пассажирами, то независимо от частоты вращения момент сопротивления остается постоянным. Такая же картина наблюдается при подъеме груза краном.
Вторая большая группа характеризуется степенной зависимостью момента от частоты вращения. Примером могут служить вентиляторы, насосы, компрессоры центробежного типа и другие механизмы. Так, момент на валу вентилятора может характеризоваться квадратичной и большей степенью в зависимости от его конструктивных особенностей.
Третья группа характеризуется постоянством мощности на валу: Р = const. Примером может служить токарный станок, где обработка детали ведется от периферийной окружности к центру. По мере продвижения резца момент сопротивления падает, а частота вращения обычно увеличивается.
► Выбор электродвигателя определяется условиями работы и требованиями производственного механизма. При этом наиболее целесообразно выбирать электродвигатель более простой, надежный в эксплуатации и имеющий наименьшую массу, размеры и стоимость. Если требуется выбрать регулируемый по скорости привод, то необходимо одновременно выбирать электродвигатель и преобразователь. В последнее время регулируемый привод выпускается комплектно, т. е. электродвигатель поставляется совместно с преобразователем.
► В любом случае выбирают следующие параметры электродвигателя: род тока, номинальное напряжение, мощность и частоту вращения, способ регулирования, режим работы и конструктивное исполнение. Наиболее простыми по конструкции, надежными в эксплуатации, имеющими наименьшую массу, размеры и стоимость, являются асинхронные двигатели с короткозамкнутым ротором. Управление ими обычно осуществляется непосредственно от трехфазной сети переменного тока без каких-либо сложных преобразователей. Эти двигатели получили наиболее широкое применение во всех отраслях производства для механизмов, не требующих регулирования скорости, при небольшой частоте включений.
Асинхронные двигатели с фазным ротором по конструкции сложнее двигателей с короткозамкнутым ротором, имеют большую массу, размеры и стоимость, а также более сложное управление. Однако они позволяют простыми средствами — резисторами в цепи ротора — регулировать частоту вращения, пусковой ток и момент. Такие двигатели используются в режимах работы с частыми пусками и остановками, например в подъемно-транспортных механизмах.
Синхронные двигатели, имеющие высокие энергетические показатели, применяют для привода компрессоров, насосов, вентиляторов и преобразовательных установок, где не требуется регулирование частоты вращения и крайне редки перерывы в работе. Двигатели постоянного тока используются для привода механизмов, работа которых сопровождается частыми пусками и остановками; требуется глубокое регулирование частоты вращения и высокое качество переходных процессов. Как правило, применяются двигатели постоянного тока независимого возбуждения с использованием преобразователей переменного тока в регулируемый постоянный.
Двигатели постоянного тока последовательного возбуждения служат для электропривода подъемно-транспортных механизмов, так как имеют повышенные перегрузочный момент и механическую прочность.
ЗАПОМНИТЕ
Номинальную угловую скорость Ωн электродвигателя выбирают в зависимости от известного передаточного числа редуктора ip и заданной угловой скорости Ωро рабочего механизма, т. е. Ωн=Ωроiр.
Наивыгоднейшее значение номинальной угловой скорости двигателя и передаточного числа редуктора для данного механизма определяется путем сравнения нескольких технико-экономических показателей. Правильное определение этих параметров особенно важно для приводов, работающих в режимах частых пусков и торможений, поскольку это влияет на производительность механизма и потери энергии.
Важное значение для надежной работы электропривода имеет выбор конструкции двигателя. Для большинства производственных механизмов используются двигатели с горизонтальным расположением вала и лапами для его крепления к несущим конструкциям, а также с фланцевым креплением. Более совершенными являются встраиваемые двигатели, которые не имеют станины, подшипниковых щитов, а иногда и вала. Их монтируют в корпусах самих рабочих механизмов. Линейные двигатели применяются в механизмах с поступательным движением рабочего органа.
По способу защиты от действия окружающей среды электродвигатели делятся на открытые, защищенные, в том числе каплезащищенные и герметичные.
При выборе мощности двигателя исходят из того, что нагрузка на его валу изменяется во времени.
► Для определения нагрузки в этих случаях строятся так называемые нагрузочные диаграммы — зависимости развиваемых двигателем момента и мощности от времени, т. е. M(t) и Р(t).
В случае завышения номинальной мощности двигателя снижаются кпд и коэффициент мощности, что приводит к росту тока в обмотках, а значит, и к перегреву двигателя и снижению срока его службы.
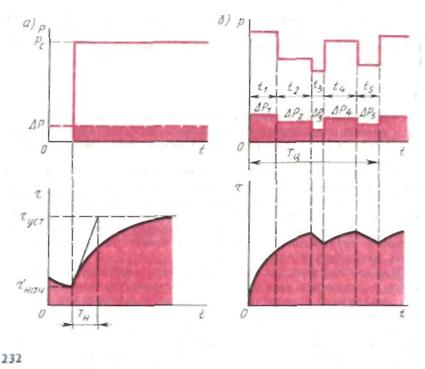
Продолжительный режим работы (рис. 232) двигателя характеризуется такой длительностью, при которой его температура достигает своего установившегося значения τуст. В таком режиме работают, например, приводы вентиляторов, насосов, преобразовательных установок.
В повторно-кратковременном режиме двигатель за время работы не успевает нагреться до установившейся температуры, а за время паузы между включениями не успевает остыть до температуры окружающей среды. Такой режим работы характерен, например, для электроприводов подъемных кранов, лебедок, лифтов, циклических конвейеров и т. п. Графики нагрузки, мощности потерь в двигателе и его температуры т при повторнократковременном режиме работы приведены на рис. 233. На графиках tр1, tр2, tр3, — время работы двигателя при первом, втором и третьем включениях; t01, t02, t03— время пауз между включениями двигателя; Tц — время цикла, после которого график нагрузки повторяется. Время цикла при повторно-кратковременном режиме не должно превышать 10 мин. На это время рассчитывается тепловой режим двигателя при его конструировании.
При кратковременном режиме работы двигатель не успевает в рабочий период нагреться до установившейся температуры, а пауза столь длительна, что температура снижается до температуры окружающей среды. Такой режим работы характерен, например, для приводов шлюзов, вспомогательных механизмов электротермических установок, зажимов колонн металлорежущих станков и др.
В продолжительном режиме двигатель работает либо с неизменной нагрузкой (см. рис. 232, а), либо с изменяющейся во времени нагрузкой (см. рис. 232,6).
► При постоянной нагрузке на валу номинальная мощность Рн двигателя должна быть выбрана равной мощности РС на
грузки. В этом случае по каталогу выбирается двигатель, удовлетворяющий условию
Рн>>РC.
Если при продолжительном режиме работы нагрузка на валу двигателя изменяется, то для выбора мощности по нагреву используют методы средних потерь за цикл или эквивалентных величин: тока, момента и мощности.

Метод средних потерь заключается в нахождении ΔРср при заданном графике нагрузки и сравнении их с номинальными потерями ΔРн, на которые рассчитан двигатель при длительной работе.
Метод является поверочным, поскольку до выбора мощности двигателя его номинальные потери неизвестны и поэтому принимают ориентировочно мощность двигателя обычно на 10—30% больше мощности за цикл.
На практике для определения мощности двигателя пользуются нагрузочными диаграммами, представляющими собой зависимости момента или мощности от времени. Значение эквивалентной (среднеквадратичной) мощности двигателя определяют по формуле
где п — число участков с различными значениями мощности Рi за цикл Tц (см. рис. 232, б) работы двигателя.
Условием правильного выбора мощности двигателя в этом случае будет Рэ ≤Рн.
Метод эквивалентной мощности применяют для двигателей постоянного тока независимого возбуждения и асинхронных двигателей, работающих при неизменной угловой скорости с редкими пусками и остановами.
Повторно-кратковременный режим (ПВ) работы двигателя, график которого приведен на рис. 233, характеризуется продолжительностью включения

Для работы в повторно-кратковременном режиме выпускают специальные двигатели, рассчитанные на стандартные значения продолжительности включения: 15, 25, 40, 60%, на которые и следует ориентироваться при выборе двигателя по мощности для такого режима.
Если нагрузка за цикл не меняется, но ПВ≠ПВст,это означает, что двигатель выбран по мощности правильно: средняя мощность потерь за цикл при ПВ не превышает среднюю мощность потерь за тот же цикл при Рн и ПВст, т. е. ΔP1ПВ≤ΔРнПВст.
Условие выбора двигателя при этом принимает вид

Проверка предварительно выбранного двигателя по мощности проводится по формуле

Если при работе электропривода наблюдаются резкие колеба ния нагрузки, то следует проверить перегрузочную способность электродвигателя. Для асинхронного двигателя она определяется) отношением критического Мк к номинальному Мн моменту Mк/Mн.
Дата добавления: 2015-04-16; просмотров: 479; Мы поможем в написании вашей работы!; Нарушение авторских прав |