КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Методические указания и заданияк контрольной работе
для студентов заочной формы обучения
специальности 100103 Социально-культурный сервис и туризм
© ФГБОУ ВПО «СГУ», 2012
© Вершинина Г.Н., Глущенко П.В., Мацканюк А.А., 2012
[1] Клиенты должны быть как фирмы, предприниматели, так и простые покупатели
[2] Клиенты должны быть как фирмы, предприниматели, например -ООО «Кипарис», Предприниматель Иванов
[3] Клиенты должны быть как фирмы, предприниматели, например -ООО «Кипарис», Предприниматель Иванов
[4]возможные значения: электрик, автомеханик, секретарь, водитель и т.п.
[5]возможные значения: электрик, автомеханик, секретарь, водитель и т.п
[6]возможные значения: официант, секретарь, повар, бухгалтер и т.п
[7]Аутентификация — 1) подтверждение подлинности; 2) установление подлинности сообщения, источника данных и приемника данных; 3) установление подлинности информации исключительно на основе внутренней структуры самой информации независимо от источника этой информации.
[8] Наш учебный вариант PGPне предназначен для подписывания писем электронной почты, в чем и заключается ограничение бесплатного варианта, предназначенного для оценки программы перед ее приобретением.
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра конструирования и стандартизации в машиностроении
Теория машин и механизмов
Учебное пособие по выполнению лабораторной работы:
«Составление кинематических схем и структурный анализ механизмов»
Иркутск 2008
Теория машин и механизмов: Учебное пособие по выполнению лабораторной работы:«Составление кинематических схем и структурный анализ механизмов»/А.В.Шматкова, – Иркутск: Изд-во ИрГТУ, 2008.
Настоящее пособие предназначается для студентов изучающих курс «Теории машин и механизмов», а также выполняющих лабораторную работу по составлению кинематических схем и проведению структурного анализа механизма.
Рецензент: П.В.Королев, канд.техн.наук, доцент кафедры «Конструирования и стандартизации в машиностроении» (ИрГТУ).
Печатается в авторской редакции
Иркутский государственный технический университет
664074, Иркутск, ул. Лермонтова,83
Оглавление
1. Теоретическая часть ………………………………………………..…4
Основные определения…………………………………………….4
Условные обозначения…….………………………………….…9
2. Практическая часть……………………………………....…..………10
3. Пример оформления отчета………...........…………………….……11
Список литературы
Цель работы:
Знакомство с принципом действия и со структурой механизмов, приобретение навыков в составлении схем.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Основные понятия (определения, термины)
1. Машина-устройство, предназначенное для преобразования энергии, информации, материала.
2. Механизм-система, группа звеньев, предназначенная для преобразования движения одного или нескольких звеньев в требуемые движения других звеньев.
· Плоский механизм – все звенья механизма движутся в одной или нескольких параллельных плоскостях.
· Пространственный механизм – все остальные механизмы.
3. Звено-это одно или несколько жестко соединенных твердых тел, входящих в состав механизма.
· Кривошип – звено, которое совершает полный оборот вокруг неподвижной оси.
· Коромысло – звено, которое совершает неполный оборот вокруг неподвижной оси.
· Шатун – звено, которое совершает сложное плоско - параллельное движение.
· Ползун – звено, которое совершает поступательное движение.
· Кулиса – звено, которое совершает возвратно – поступательное, вращательное, качательное движение и по нему движется ползун (камень кулисы.).
· Стойка – неподвижное звено.
4. Входное звено - это звено, которому сообщается движение.
5. Выходное звено - это звено, совершающее движение, для которого предназначен механизм.
6. Кинематическая пара - это подвижное соединение двух звеньев.
· Высшая кинематическая пара – соединение звеньев происходит в точке или по прямой линии.
· Низшая кинематическая пара – соединение звеньев происходит по поверхности.
7. Кинематическая цепь (КЦ) – это группа звеньев соединенных между собой кинематическими парами.
· Сложная КЦ – это когда в кинематической цепи имеется хотя бы одно звено входящее более чем в две кинематические пары.
· Простая КЦ –это когда каждое звено кинематической цепи входит не более чем в две кинематические пары
· Замкнутая КЦ – каждое звено входит, по крайней мере, в две кинематические пары.
· Незамкнутая КЦ – цепь, у которой есть звенья, входящие только в одну кинематическую пару.
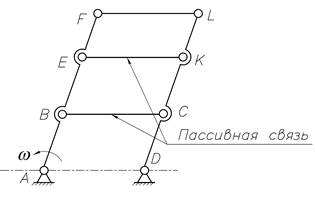
8. Пассивная связь – это звено или несколько звеньев, не оказывающих никакого влияния на характер движения механизма (выходного звена).
|
9.
|
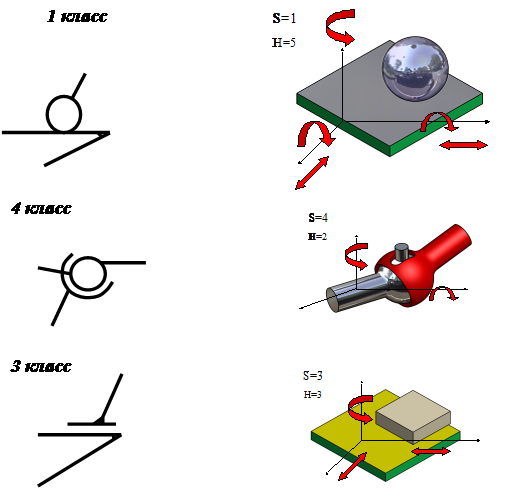
10. Класс кинематической пары –
Класс кинематической пары определяется количеством наложенных условий связи
 |
Все кинематические пары (КП) подразделяются на 5 классов.
КП - 1 класса - пятиподвижная,
КП - 2 класса - четырехподвижная и т.д.
 |
11. Группа Ассура–это кинематическая цепь с нулевой степенью подвижности, не распадающаяся на более простые кинематические цепи, удовлетворяющие этому условию.
Группы Ассура бывают 2,3,4 классов в зависимости от класса контура.
· Контур – замкнутая область части плоскости занятой звеном или ограниченная со всех сторон звеньями.
· Класс контура – определяется числом внутренних кинематических пар, входящих в этот контур
· Класс группы Ассура – определяется наивысшим классом контура, входящего в ее состав.
12. Степень подвижности –  плоских механизмов
плоских механизмов
где W – степень подвижности;
n – количество подвижных звеньев механизма;
p5, p4 – количество кинематических пар 5, 4 классов.
Таблица 1 Классификация групп Ассура
 |
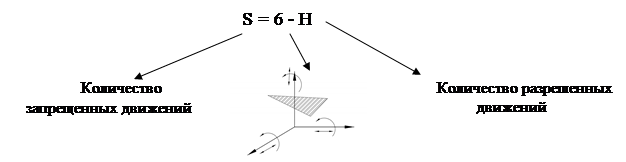
Степень подвижности – пространственных механизмов
 |
W –степень подвижности;
n –количество подвижных звеньев механизма;
p5, p4 и т.д.–количество кинематических пар 5, 4, 3, 2, 1 классов.
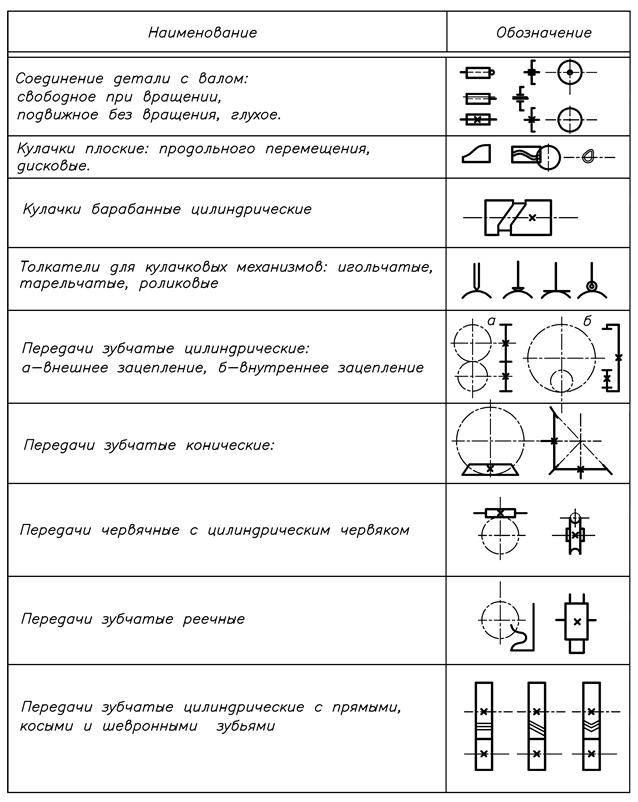
Таблица 2Условные обозначения
  |
Таблица 2(продолжение)
|
ПРАКТИЧЕСКАЯ ЧАСТЬ
ПОРЯДОК ПРОВЕДЕНИЯ ЛАБОРАТОРНОЙ РАБОТЫ
· Составить схемы трех механизмов. (Модели механизмов выдаются преподавателем).
· Для каждого механизма провести полный структурный анализ по следующему алгоритму:
Алгоритм структурного анализа механизма
1. Вычертить схему механизма согласно условным обозначениям табл.2.
2. Определить вид механизма.
3. Определить назначение механизма.
4. Обозначить все звенья механизма, дать им названия.
5. Обозначить все кинематические пары механизма, определить их класс и вид.
6. Определить степень подвижности механизма. Сделать вывод.
7. Заменить высшие кинематические пары низшими кинематическими парами.
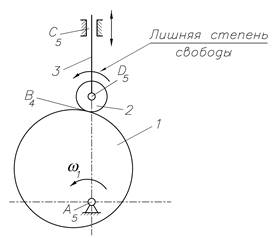
8. Устранить из схемы механизма лишние степени свободы.
9. Устранить из схемы механизма пассивные связи.
10. Разложить механизм на структурные группы Ассура. Определить их класс, вид и порядок.
11. Определить класс механизма.
· Оформить отчет (пример см. ниже).
 Министерство образования и науки Российской Федерации
Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
ИРКУТСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра конструирования и стандартизации в машиностроении
Наименование кафедры
ОТЧЕТ
по лабораторной работе №____
«Составление кинематических схем и структурный анализ механизмов»
Выполнил студент группы _________ ________ ____________
Шифр подпись И.О.Фамилия
Проверил ________ ____________
подпись И.О.Фамилия
| |
 Цель работы:
Цель работы:
Знакомство с принципом действия и со структурой механизмов, приобретение навыков в составлении схем.
Дата добавления: 2014-11-13; просмотров: 691; Мы поможем в написании вашей работы!; Нарушение авторских прав |