КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Система управления
Любое управление подразумевает оказание воздействия на объекты с целью изменения их поведения в желаемом направлении. Следовательно, для осуществления управления в некоторой системе необходимо наличие объектов, вырабатывающих такие воздействия, а также объектов, на которые эти воздействия оказываются. Поэтому в любой системе управления можно выделить в качестве подсистем две системы – управляемую и управляющую.
Определение 21. Система управления – это система, целесообразное (целенаправленное) поведение которой обеспечивается путем выработки соответствующих воздействий и оказания этих воздействий на элементы системы.
Определение 22. Управляемая система – это подсистема системы управления, состоящая из объектов, на которые оказывается воздействие для обеспечения целесообразного поведения системы управления.
Определение 23. Управляющая система – это подсистема системы управления, вырабатывающая и оказывающая воздействия на управляемую подсистему для обеспечения целесообразного поведения системы управления.
Структурная схема системы управления, представленной в виде взаимодействующих управляющей и управляемой систем, приведена на рис. 6.
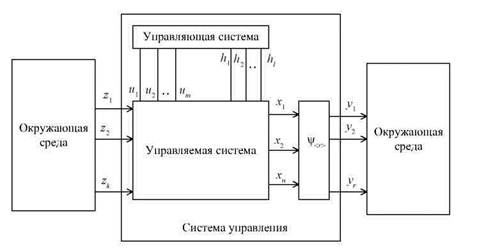
Рис. 6. Структурная схема системы управления
На схеме приняты следующие обозначения:
Z<k>(t) = <z1(t), z2(t), ..., zk(t)> – возмущающие переменные, характеризующие воздействия окружающей среды на систему управления в момент времени t;
U<m>(t) = <u1(t), u2(t), ..., um(t)> – управляющие переменные, характеризующие целенаправленные воздействия управляющей системы на управляемую систему в момент времени t;
X<n>(t) = <x1(t), x2(t), ..., xn(t) > – переменные состояния, характеризующие состояние управляемой системы в момент времени t;
Y<r>(t) = <y1(t), y2(t), ..., yr(t)> – выходные переменные, характеризующие выходную ситуацию или воздействие системы управления на окружающую среду в момент времени t;
H<l>(t) = <h1(t), h2(t), ..., hl(t)> – наблюдаемые переменные – это те переменные состояния и выходные переменные, которые наблюдаются управляющей системой в момент времени t.
Введенные переменные часто называют параметрами. Аргументы у всех переменных на схеме для краткости опущены.
Выходные переменные в общем случае связаны с переменными состояния функциональной зависимостью
 (1)
(1)
Где  - символ вектор-функции.
- символ вектор-функции.
Используя введенные переменные, можно составить следующую математическую модель системы управления:
 (2)
(2)
где  - начальное состояние управляемой системы;
- начальное состояние управляемой системы;
A(t) – область допустимых значений векторов переменных состояния управляемой системы;
B(t) – область допустимых значений векторов управляющих переменных;
C(t) – область допустимых значений векторов наблюдаемых переменных.
Выражения (2) описывают состояние системы в любой момент времени на интервале [t0,T], а совместно с выражением (1) – выходную ситуацию в том же интервале времени.
Уравнение (1) в модели (2) представляет собой функциональную зависимость вектора состояний системы от начального состояния управления, возмущений, наблюдаемости системы, времени. Выражения (2)–(4) в этой модели являются математической формулировкой ограничений на состояния системы, управление и наблюдаемость переменных.
Все учитываемые ограничения можно разделить на два рода:
– ограничения первого рода, обусловленные действием законов и закономерностей природы;
– ограничения второго рода, обусловленные конечной величиной ресурсов, а также различных величин, которые не могут или не должны превосходить определенных пределов.
Теория управления организационными системами изучает не любые системы, а только определенный класс систем, в состав которых входят коллективы людей. Эти системы часто называют просто организациями. Наличие коллективов людей приводит к тому, что организационные системы как системы управления обладают следующими особенностями:
– сложной организацией, т. е. сложной структурой с большим количеством связей и сложной программой;
– сложным поведением в меняющейся среде;
– адаптивной устойчивостью поведения, т. е. одна и та же линия поведения системы может быть реализована при различном состоянии окружающей среды;
– наличием информационных процессов с обязательным включением стадий преобразования циркулирующей в системе информации.
Дата добавления: 2014-12-03; просмотров: 318; Мы поможем в написании вашей работы!; Нарушение авторских прав |