КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Номинальное скольжение асинхронных двигателей – 3-8 %.
ЭДС, наводимая в роторе, пропорциональна скольжению и при пуске двигателя (S = 1) значительно (в 20-30 раз) превышает номинальное значение. Поэтому пусковой ток больше номинального (у короткозамкнутых двигателей в 5-7 раз), что необходимо учитывать при выборе защитных устройств. При изменении скольжения изменяется также частота тока в роторе f2:
f2 = S × f1
Проверка двигателя. Новый двигатель или двигатель, длительно не находящийся в эксплуатации, перед пуском необходимо проверить. Неисправности в двигателе можно разделить на две группы: механические и электрические.
К основным механическим относятся: наличие трещин в корпусе статора, ненадежное крепление боковых крышек статора и крышек подшипников (слабое или с перекосами), задевание вентилятора о корпус статора или крышку вентилятора, повреждение лопастей вентилятора, наличие продольного или поперечного люфта в роторе, задевание ротора о статор из-за износа подшипников или попадания посторонних предметов. Исправный в механическом отношении двигатель не должен иметь этих повреждений, свободно вращаться от руки.
Электрические повреждения у короткозамкнутых двигателей наблюдаются главным образом в обмотках статора: обрыв обмотки, короткое замыкание обмоток между собой или на корпус вследствие повреждения изоляции, короткое замыкание витков в одной из обмоток, снижение изоляции обмоток ниже допустимого (сопротивление изоляции должно быть не меньше 0,5 МОм), неправильная маркировка вывода обмоток.
Основным рабочим прибором для проверки двигателей является мегомметр. Им проверяется целостность обмоток и сопротивление изоляции. Мегомметр представляет собой генератор постоянного тока с ручным приводом, вырабатывающим напряжение 500 В или 2500 В. При подсоединении выводов одной обмотки, если она цела, прибор покажет «0». При подключении выводов разных обмоток или одной обмотки и корпуса измеряется сопротивление изоляции между ними (рис. 10.4).

Рис. 10.4
Наличие виткового замыкания можно определить измерением сопротивлений обмоток с помощью моста сопротивлений (сопротивления обмоток, составляющие доли Ома, должны быть равными).
Проверка правильности маркировки или самостоятельное определение начал и концов обмоток делается методом трансформации. Суть его заключается в том, что, если в цепи переменного тока две последовательно соединенных обмотки включены согласно (конец одной с началом другой), то их магнитные потоки совпадают по направлению, складываются и в третьей обмотке индуктируется ЭДС. Если же их включить встречно (конец одной с концом другой), то магнитные потоки направлены также встречно, результирующий магнитный поток и показания вольтметра равны нулю (рис. 10.5).
Рис. 10.5
Последовательность выполнения работы: 1) выясняется наличие неисправностей; 2) определяются выводы обмоток и произвольно маркируются; 3) по схемам рисунка 10.5 уточняется правильность маркировки для двух обмоток, а затем, заменив одну из них третьей, маркируется и она; 4) если двигатель исправлен, осуществляется его включение и реверсирование. В отчете дать обоснованный вывод о состоянии двигателя, привести результаты замеров сопротивления изоляции.
Контрольные вопросы:
1. Устройство и принцип работы асинхронного двигателя.
2. Что такое скольжение двигателя и почему он называется асинхронным?
3. Как изменяется ЭДС и частота тока в роторе при пуске двигателя?
4. Как изменить направление вращения двигателя?
5. Почему магнитопроводы статора и ротора делают из тонких листов электротехнической стали, изолированных друг от друга?
6. Как определяется возможная схема включения обмоток статора: в звезду или в треугольник?
Лабораторная работа № 11
Исследование рабочих характеристик асинхронного электродвигателя
Цель работы: экспериментально определить рабочие характеристики асинхронного двигателя.
Программа работы
1. Собрать схему экспериментальной установки (рис. 11.1), в которой переменной нагрузкой является генератор постоянного тока.


Рис. 11.1
2. Подавая питание в схему от трехфазного автотрансформатора, провести опыт холостого хода при изменении напряжения питания от 250 В до 50 В. Генератор при этом отключен. Данные опыта записать в таблицу 11.1.
Таблица 11.1
| № опыта | U1 | U12 | Px x |
| B | B2 | Вт | |
Построить характеристику холостого хода Рх х = f (U12), по которой определить механические потери ∆Рмех и потери в стали ∆Рст при номинальном напряжении U1 = 220 В.
3. Изменяя нагрузку на двигателе от Р1 = Рх х до Р1 = 0,7 кВт, измерить заданные величины: U1, I1, P1, n2 и занести в таблицу 11.2. Напряжение питания поддерживать постоянным U1 = Uн.
Таблица 11.2
| № п/п | Данные опыта | Данные расчета | |||||||||||||
| U1 | I1 | P1 | n2 | S | ∆Pэ1 | ∆Pст | ∆Pэ2 | ∆Pмех | ∆Pд | Pэм | Р2 | М2 | cosφ | η | |
| В | А | Вт | об./мин. | - | Вт | Вт | Вт | Вт | Вт | Вт | Вт | Нм | - | - | |
4. Произвести необходимые расчеты и построить рабочие характеристики электродвигателя:
I1 = f (P2), M2 = f (P2), S = f (P2), cosφ = f (P2), η = f (P2).
Теоретические положения
1. Энергетическая диаграмма.
Преобразование энергии в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии (в единицу времени это потери мощности). Потери делятся на механические, магнитные и электрические.
Из сети в обмотку статора поступает мощность Р1. Часть этой мощности расходуется на магнитные потери ∆Pст (перемагничивание сердечника статора – гистеризис, вихревые токи в стали сердечника), а также на покрытие электрических потерь ∆Pэ1, обусловленных нагревом обмоток статора протекающим током.
Оставшаяся часть мощности при помощи магнитного поля передается на ротор и поэтому называется электромагнитной мощностью Рэм:
Рэм = Р1 – (∆Pст + ∆Pэ1).
Ток, проходящий в обмотках ротора, также приводит к электрическим потерям – ∆Pэ2. Магнитными потерями в сердечнике ротора обычно пренебрегают, так как в рабочих режимах частота тока в роторе небольшая (f2 = S ∙ f1) и магнитные потери малы.
Механические потери в асинхронном двигателе ∆Pмех обусловлены трением в подшипниках и трением вращающихся частей о воздух (вентиляционные потери).
Кроме того в двигателе имеются дополнительные потери ∆Pд, вызванные наличием полей рассеяния, пульсацией поля в зубцах ротора и статора.
С учетом сказанного полезная мощность двигателя – P2, передаваемая рабочей машине, будет определяться выражением:
Р2 = Р1 – (∆Pст + ∆Pэ1 +∆Pэ2 + ∆Pмех + ∆Pд).
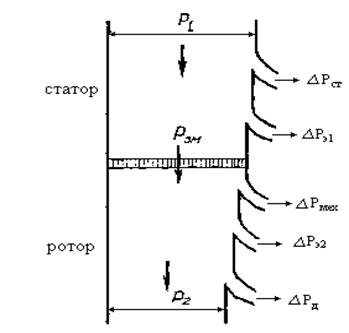
Рис. 11.2
На рисунке 11.2 показана энергетическая диаграмма асинхронного двигателя. Коэффициент полезного действия его

Он выше, чем у машин постоянного тока в связи с отсутствием коллектора. В зависимости от величины мощности двигателя номинальный кпд может быть в пределах от 0,8 до 0,95 (верхний предел у двигателей большой мощности).
2. Расчет потерь:
а) по характеристике холостого хода:
Рх х = f (U 2),
экстраполируя ее до U = 0, находим потери в стали и механические потери, которые можно считать постоянными, так как U = const и n2 = const.

Рис. 11.3
б) электрические потери в статоре:
∆Pэ1 = m1 I12 r1,
где m1 – число фаз (3);
I1 – ток статора;
r1 – сопротивление фазы статора;
в) электромагнитная мощность:
Рэм = Р1 – (∆Pст + ∆Pэ1);
г) электрические потери в роторе:
∆Pэ2 = S∙Рэм;
д) дополнительные потери принимаются ориентировочно:
∆Pд = 0,005Р1;
е) полезная мощность Р2 = Р1 – Σ ∆Р;
ë) полезный момент:
 ,
,
где  ;
;
ж) коэффициент мощности:

з) коэффициент полезного действия:

и) скольжение 
где n1 = 1500 об./мин.;
3. рабочие характеристики асинхронного двигателя.
Рабочие характеристики асинхронного двигателя представляют собой зависимости частоты вращения n2 (скоростная характеристика), кпд – η, полезного момента М2, коэффициента мощности cosφ, величины тока I1 от полезной мощности Р2 при U = const, f1 = const.
Скоростная характеристика n2 = f (P2). Частота вращения двигателя определяется формулой:
n2 = n1 (1 – S),
где  – частота вращения магнитного поля статора.
– частота вращения магнитного поля статора.
В то же время

т.е. скольжение зависит от потерь в роторе.
При возрастании нагрузки это отношение растет, достигая значений 0,01÷0,06 при номинальной нагрузке. В соответствии с этим скоростная характеристика представляет собой кривую, слабо наклонную к оси абсцисс. Пренебрегая потерями холостого хода, можно считать, что ∆Pэ2 ≈ 0 и S = 0, т.е. n2 ≈ n1 при Р2 = 0.
Зависимость М2 = f (P2) так же будет иметь криволинейный характер, так как при возрастании Р2 уменьшается n2, и момент возрастает быстрее, чем Р2.
Зависимость cosφ = f (P2) также нелинейна и имеет экстремум (максимальное значение коэффициента мощности) при нагрузке, близкой к номинальной. На холостом ходу cosφ обычно не превышает 0,2, так как активная составляющая тока статора гораздо меньше индуктивной. При возрастании нагрузки увеличивается активная составляющая тока I1, коэффициент мощности возрастает, достигая значений 0,8÷0,9. Увеличение нагрузки свыше номинальной приводит к росту величины скольжения и индуктивного сопротивления двигателя (S∙x2) при постоянстве активного сопротивления, что приводит к уменьшению cosφ. Эти же явления определяют похожий характер зависимости кпд от нагрузки, но кривая η= f (P2) начинается с нуля при Р2 = 0. Учитывая характер этих двух зависимостей: cosφ = f (P2) и η= f (P2), при работе двигателя необходимо использовать его при номинальной нагрузке, не завышая его мощность и не допуская длительной работы на холостом ходу или при малой нагрузке. Если двигатель длительное время работает недогруженным, целесообразно понизить напряжение. при этом мощность двигателя и потери в стали понизятся, а кпд и коэффициент мощности возрастут.
Примерный характер рабочих характеристик асинхронного двигателя показан на рисунке 11.4.

Рис. 11.4
Контрольные вопросы
1. Перечислите виды потерь мощности, имеющие место при работе асинхронного двигателя.
2. Как снизить потери в стали?
3. Почему кпд и коэффициент мощности двигателя уменьшаются при его перегрузке?
4. Как повысить cosφ и η при небольших нагрузках?
Лабораторная работа № 12
Измерительные трансформаторы
Цель работы: ознакомиться с устройством, назначением и схемами включения измерительных трансформаторов.
Дата добавления: 2014-12-23; просмотров: 618; Мы поможем в написании вашей работы!; Нарушение авторских прав |