КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Синтез маршрутов обработки поверхностей
Маршрут обработки поверхности (МОП) - это последовательность методов (видов, переходов одного метода) обработки, необходимых для достижения требуемых чертежом детали параметров поверхности. Такими параметрами являются:
• геометрический тип поверхности;
• точность размера;
• шероховатость;
• вид термообработки и т.д.
Между методами обработки и параметрами поверхности существует связь, описываемая функцией

Т.е. поверхность с параметрами более низкого качества  , преобразуется в поверхность с параметрами более высокого качества
, преобразуется в поверхность с параметрами более высокого качества  посредством метода
посредством метода 
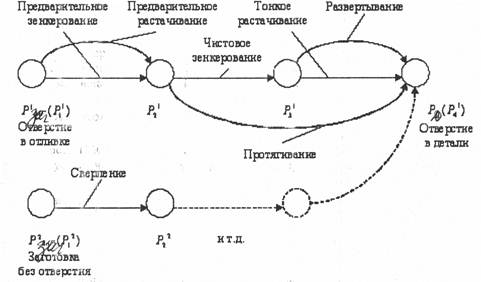
Рис. 9.1 Пример представления вариантов обработки поверхности детали.
Любая последовательность дуг графа, приводящая из вершины (вершин)  характеризующей поверхность заготовки, в вершину
характеризующей поверхность заготовки, в вершину  , соответствующую поверхности детали, представляет вариант МОП.
, соответствующую поверхности детали, представляет вариант МОП.
ЛЕКЦИЯ 9 Стр. 2 из 6
Количество возможных методов обработки и МОП очень велико. На конкретном предприятии оно ограничивается возможностям ч существующего оборудования. Это сокращает количество альтернативных МОП, но проблема (задача) выбора конкретного МОП для конкретной поверхности остается.
Большинство алгоритмов назначения возможных МОП в САПР технологических процессов строится на основе таблиц соответствий. Их структура и принципы (алгоритмы) работы с ними будут рассматриваться и далее.
Пример. Выбор возможных вариантов маршрута обработки торцовой поверхности детали типа «Тело вращения». Возможные маршруты обработки поверхности и таблица соответствий для их выбора показаны соответственно в таблицах 9.1 и 9.2.
Таблица 9.1 Маршруты обработки поверхностей деталей типа «тел вращения» (фрагмент базы данных)
| Код МОП | Код метода обработки | Вид обработки | Параметры поверхности после обработки | |
| Квалитет | Ка, мкм | |||
| Черновое точение Получистовое точение | 16 14 | 25 12.5... 6.3 | ||
| 100 101 102 | Черновое точение Получистовое точение Чистовое точение | 16 14 13... 11 | 25 12.5... 6,3 3.2 | |
| 100 101 102 103 | Черновое точение Получистовое точение Чистовое точение Тонкое точение | 16 14 13... 11 11 ... 8 | 25 12,5...6.3 3.2 1.6 | |
| , 15 | 100 ' 101, ' 502 ... | Черновое точение Получистовое точение Получистовое шлифование | 16 14 11..8 | 25 12,5... 6.3 3.2 |
Таблица 9.2 Таблица соответствий для выбора МОП (фрагмент)
| :од м 0 П | Условия выбора МОП | ||||||||||||||
| Код типа ^ поверхности | Точность размера, квалитет | Ка, мкм | |||||||||||||
| Цил. | Торц. | ' * * | ' ' ' | 12.5 6.3 | 3.2 | 1.6 | |||||||||
| 14 • | .1 | ||||||||||||||
| . . . | • • I | ||||||||||||||
| ... | . . . |
Примечание: границы диапазона (13 ... 11; 11 ... 8; 12,5 ... 6,3) входят в соответствующий диапазон.
Левая часть таблицы соответствий, обозначающая строки, представляет собой множество типовых решений (здесь множество МОП).
Верхняя часть таблицы соответствий, обозначающая столбцы, - условия выбора или применимости типовых решений (здесь МОП) и их числовые значения.
Центральная часть таблицы соответствий - булева матрица, обозначающая связи между условиями выбора типовых решений (здесь МОП) и самими типовыми решениями (1 - наличие связи, 0 - отсутствие связи).
По имеющемуся комплексу исходных данных из таблицы соответствий принимаются те решения, в строках которых булева матрица имесг единицы для всех значений факторов, ^ходящих в условия применлмости. Из таблицы соответствий может быть выбрано одно; или несколько решений. Например, требуется выбрать маршрут обработки поверхности детали со следующими параметрами:
а) торцовая поверхность, 14 квалитет, Rа 12,5 - МОП с кодом «12»;
б) торцовая поверхность, 11 квалитет, Rа 3,2 - МОП с кодами «13» и «15». Если выбрана одно решение, то оно окончательное. Если выбрано несколько решений, то окончательное из них выбирается с привлечением методов оптимизации или пользователем (технологом).
ЛЕКЦИЯ 9 Стр. 3 из 6
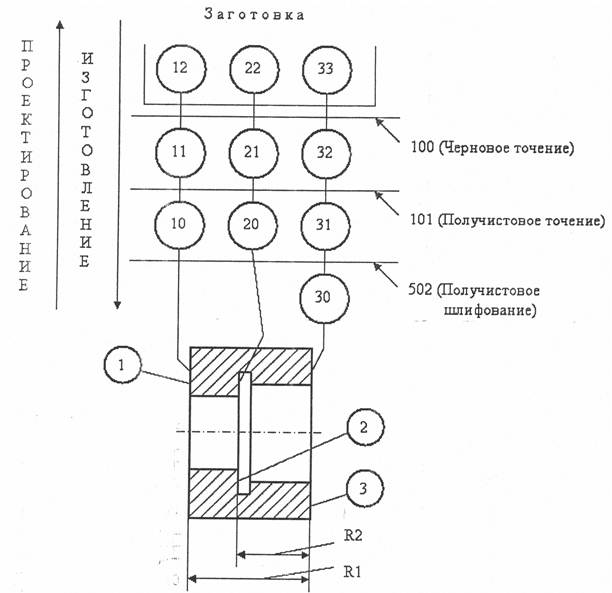
Рис. 9.2. Результаты синтеза маршрутов обработки торцовых поверхностей
детали «втулка»
Рассмотрим еще пример. Покажем результаты синтеза маршрутов обработки трех торцовых поверхностей детали «втулка»
в виде трех линейных графов (на базе предыдущих таблиц) - рис.9.2.
На рисунке 9.2 приняты следующие обозначения: 10, 11, 12, 20, . . ., 31, 32, 33 - промежуточные состояния поверхностей детали «втулка». Например, 31 - первое промежуточное состояние третьей поверхности (по направлению «от детали»).
Дата добавления: 2014-12-30; просмотров: 475; Мы поможем в написании вашей работы!; Нарушение авторских прав |