КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Принципы работы РЛС. Определение места судна при помощи РЛС.
Радиолокацией называется обнаружение, определение координат и параметров движения различных объектов (целей), отражающих или излучающих радиоволны. Комплекс радиоэлектронных устройств, выполняющих эту задачу, называется радиолокационной станцией (РЛС) или радиолокатором.
РЛ-объектом или целью может быть любое физическое тело, электрические свойства которого отличаются от окружающей среды. Электромагнитная энергия сигналов, излучаемая передающей антенной, распространяясь в заданном направлении, отражается от того или иного объекта, расположенного на пути распространения радиоволн, и принимается приёмником. С выхода приёмника усиленные сигналы поступают в индикатор, где преобразуются в форму, удобную для получения информации о принятых сигналах.
Рлс с активным ответом (на объекте радиолокационный ответчик – приёмопередатчик) позволяет опознать цель по кодированным ответным сигналам. В зависимости от структуры зондирующих сигналов различают 2 метода РЛ-обнаружения: непрерывного излучения колебаний и импульсный метод. Импульсная РЛС периодически излучает кратковременные импульсы колебаний СВЧ, а в промежутках принимает отражённые от объектов импульсные сигналы, запаздывающие на время  .
.
Разрешающая способность РЛС характеризует возможность раздельного обнаружения и определения координат нескольких целей, находящихся на определённом расстоянии друг от друга. Разрешающая способность по дальности численно равна минимальному расстоянию между двумя раздельно обнаруживаемыми объектами, расположенными в одном направлении. Раздельное обнаружение сигналов от этих объектов возможно при условии, что отражение от объекта 1 закончится ранее, чем поступит сигнал от объекта 2.
 |
Поскольку отражение от 1 длится в течение tи, а сигнал от 2 запаздывает на время  , то условием раздельного приёма сигналов будет Dt> tи или d>DD, где DD – разрешающее расстояние. Значение DD – предельное. Чем меньше DD – тем выше РСД. Из-за конечных размеров электронного пятна реальная РСД будет хуже. DDо с учётом ЭЛТ DDо = DD + Dинд. DDинд = dп*Мр (диаметр пятна/масштаб шкалы).
, то условием раздельного приёма сигналов будет Dt> tи или d>DD, где DD – разрешающее расстояние. Значение DD – предельное. Чем меньше DD – тем выше РСД. Из-за конечных размеров электронного пятна реальная РСД будет хуже. DDо с учётом ЭЛТ DDо = DD + Dинд. DDинд = dп*Мр (диаметр пятна/масштаб шкалы). 
 ;
;  .
.
На крупномасштабных шкалах разрешающая способность РЛС по дальности приближается к потенциальной; на мелкомасштабной РСД уменьшается и будет зависеть главным образом от dэ. В обоих случаях на dп влияет качество фокусировки луча на ЭЛТ.
Разрешающая способность по направления (азимуту) оценивается минимальным значением угла a между направлениями на 2 равноудалённых объекта 1 и 2, при котором отражённые сигналы от этих объектов будут приниматься раздельно. a - потенциально разрешающий угло. Чем меньше a, тем выше РСН. a практически равен ширине диаграммы направленности антенны в горизонтальной плоскости a = aгор. Реальная разрешающая способность по направлению будет заметна хуже из-за влияния ЭЛТ индикатора. aо = a + aинд. aинд – равен угловым размерам диаметра пятна:  .
.  .
.
Следовательно по мере приближения отметки цели к началу развёртки РСН ухудшается.
Основное уравнение радиолокации:
 , Pпр – мощность принимаемых отражённых сигналов.
, Pпр – мощность принимаемых отражённых сигналов.
Следовательно Dmax зависит от импульсной мощности передатчика, чувствительности приёмника, направленности антенны (GA), ЭПО объекта (Sэ).
Водная поверхность оказывает влияние на работу РЛС из-за отражения электро-магнитной энергии от подстилающей поверхности, а также вследствие сферичности Земли, ограничивающей дальность РЛ-обнаружения. Сигналы РЛС достигают объекта и отражаются обратно двумя путями: прямым путём и путём отражения от водной поверхности. Суммарное поле объекта оказывается неравномерным и в пределах диаграммы направленности антенны в вертикальной плоскости ности лепестковый характер. Число лепестков n зависит от высоты hантенны и длины волны  .
.
Влияние атмосферы выражается в следующем: из-за атмосферной рефракции радиоволны отклоняются от прямолинейного распространения; поглощается и рассеивается энергия радиоволн в сантиметровом и миллиметровом диапазоне.
Атмосферная рефракция, т. е. преломление радиоволн в нижних слоях атмосферы возникает вследствие того, что давление и температура воздуха медленно убывает с высотой. Это в свою очередь уменьшает диэлектрическую проницаемость воздуха и вызывает увеличение скорости распространения радиоволн с ростом высоты. Траектории радиолучей искривляются в направлении земной поверхности и дальнейшее действие РЛС повышается. При резком падении температуры может возникнуть субрефракция – искривление радиолучей вверх.
Затухание радиоволн, вызванное дождём, туманом, снегом, происходит по двум причинам. Во-первых, капли вода в атмосфере – несовершенный диэлектрик для сантиметровых волн и поэтому возбуждаемый в каплях ток СВЧ создаёт тепловые потери энергии. Во-вторых, при значительных размерах водяных капель имеет место отражение и рассеяние радиоволн. Затухание зависит также от плоскости завесы, формы частичек, температуры (чем больше воды в тумане, тем хуже видимость и меньше дальность действия РЛС). Дожди вызывают заметное ослабление дальности действия РЛС. Отражение энергии в сторону РЛС, вызываемое дождём, часто бывает значительным – мерцающее свечение на экране. Дождевые облака – светлые пятна на экране. Град и снег по сравнению с дождём вызывает меньшее поглощение энергии.
Для надежного определения места с помощью РЛС необходимо быть уверенным в правильном опознании объектов, наблюдаемых на экране индикатора. Наиболее точно могут быть опознаны объекты, называемые точечными ориентирами. К ним относятся обозначенные на карте небольшие островки, отдельно лежащие камни, скалы, плавучие знаки навигационного ограждения, оконечности молов и причалов, а также радиолокационные маяки-ответчики.
Хорошее изображение, отвечающее по форме очертаниям берега на карте, дают высокие обрывистые берега. Такой берег может быть опознан достаточно уверенно. Низменные песчаные мысы, плоское побережье, покрытые снегом пологие берега, плавучий лед рассеивают энергию и могут не давать эхо-сигналов. В результате этого возвышенные полуострова, соединяющиеся с основным берегом низкими перешейками, могут изображаться на экране РЛС как острова. Если мыс имеет пляж, за которым лежит обрывистый склон, то при пеленговании или измерении расстояния до такого мыса легко ошибиться, так как урез воды на определенных расстояниях радиолокатор не обнаружит. Ошибки при измерении расстояний до берега особенно вероятны в морях, имеющих низкие берега и значительные колебания уровня воды.
Обычно уже на расстоянии от 15 до 8 миль изображение на экране индикатора достаточно верно передает очертания береговой черты, что позволяет сопоставлять его с картой.
Для определения места могут быть использованы радиолокационные расстояния до опознанных на экране РЛС объектов или пеленги этих объектов.
Радиолокационное измерение расстояний в большинстве случаев производится с помощью подвижного круга дальности (ПКД). Расстояние до объекта можно определить также на глаз по неподвижным кругам дальности (НКД). При этом способе ошибка расстояния составляет в среднем 0,1 интервала между соседними кругами. Для повышения точности наблюдений расстояния следует измерять до выдающихся частей берега, направленных к судну.
Радиолокационные пеленги измеряют при помощи механического или электронного визира, устанавливаемого над серединой эхо-сигнала. Истинный пеленг на объект находят затем путем исправления радиолокационного .пеленга поправкой гирокомпаса. Если РЛС не имеет ориентации по норду, то измеряют КУ эхо-сигнала, который переводят в ИП.
Пеленги следует брать на обрывистые оконечности, направленные перпендикулярно к визирной плоскости. Ошибка в пеленге будет тем меньше, чем дальше располагается эхо-сигнал от центра экрана, поэтому при взятии пеленгов следует использовать шкалу наиболее крупного масштаба.
В большинстве случаев точность радиолокационного измерения расстояний значительно выше точности радиолокационного пеленгования, что необходимо иметь в виду при определении места судна. Только на малых расстояниях, не превышающих 0,5 мили, линия пеленга не уступает по точности измеренному расстоянию.
Определение места судна по радиолокационным расстояниям. Если на экране РЛС можно выбрать два или три удачно расположенных точечных или характерных ориентира, то место судна может быть получено по измеренным до этих ориентиров радиолокационным расстояниям. Проведя радиолокационные наблюдения, находят на карте ориентиры, соответствующие эхо-сигналам, от которых наносят вблизи счислимого места судна засечки радиусами, равными измеренным расстояниям в масштабе карты. Место судна получают в пересечении засечек (рис. 1, а).
Если на экране индикатора имеется изображение ровной береговой черты, не имеющей характерных выступающих мысов, и одного точечного ориентира, то место судна получают следующим приемом (рис. 1, б).Измерив расстояние D1 до точечного объекта, подводят подвижной круг дальности касательно к кромке берега, т. е. измеряют кратчайшее расстояние D2 до береговой черты. От точечного ориентира радиусом D1 проводят на карте дугу аа/. Взяв циркулем расстояние D2, находят на дуге аа/ такое положение острия циркуля, при котором карандаш опишет окружность bb/,касательную к береговой черте. Место накола острия циркуля будет соответствовать положению судна. Полученную с помощью РЛС обсервованную точку обозначают кружком с полукругом над ним.
Во всех случаях судоводитель должен стремиться определять место судна по трем расстояниям, что дает возможность по величине треугольника погрешностей выявить возможные ошибки в наблюдениях или опознании объектов. Для уменьшения ошибок от неодновременного измерения расстояний рекомендуется первыми измерять расстояния до объектов, находящихся вблизи траверза. В последнюю очередь измеряют расстояние до ориентиров, расположенных на курсовых углах, близких к 0 и 180°, замечая время и отсчет лага.

| б) 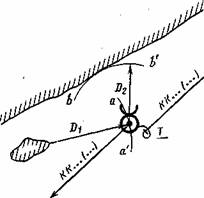
|
Рис. 1. Определение места судна:
а — по радиолокационным расстояниям; б — по точечному ориентиру и ровной береговой черте
 Определение места судна по радиолокационному расстоянию и визуальному пеленгу. На практике широко применяют комбинированный способ определения места по радиолокационному расстоянию и визуальному пеленгу. Если пеленг и расстояние измерены до одного и того же точечного ориентира, то определение места выполняется в том же порядке, что и при визуальных наблюдениях.
Определение места судна по радиолокационному расстоянию и визуальному пеленгу. На практике широко применяют комбинированный способ определения места по радиолокационному расстоянию и визуальному пеленгу. Если пеленг и расстояние измерены до одного и того же точечного ориентира, то определение места выполняется в том же порядке, что и при визуальных наблюдениях.
Часто пеленгуемый маяк располагается на мысу в некотором удалении от берега. Тогда расстояние на экране РЛС измеряется не до маяка, а до лежащей перед ним береговой черты. В этом случае измеренное расстояние откладывают по линии пеленга от уреза воды.
Когда в районе пеленгуемого объекта берег не имеет характерных ориентиров, измеряют кратчайшее расстояние Dдо береговой черты. Исправив и проложив на карте линию визуального пеленга(рис. 2), растворяют ножки циркуля в масштабе карты на расстояние D. Находят такое положение острия циркуля на линии пеленга, при котором вторая ножка опишет дугу, касательную к береговой черте. Место судна будет находиться в точке накола острия циркуля.
Дата добавления: 2015-01-29; просмотров: 1235; Мы поможем в написании вашей работы!; Нарушение авторских прав |