КАТЕГОРИИ:
АстрономияБиологияГеографияДругие языкиДругоеИнформатикаИсторияКультураЛитератураЛогикаМатематикаМедицинаМеханикаОбразованиеОхрана трудаПедагогикаПолитикаПравоПсихологияРиторикаСоциологияСпортСтроительствоТехнологияФизикаФилософияФинансыХимияЧерчениеЭкологияЭкономикаЭлектроника
Нарисуйте блок-схемы обучения искусственной нейронной сети (ИНС) в системах управления с учителем и стимулируемым самообучением.
СПАУ
3. При решении каких задач теории управления может сыграть главенствующая роль теория систем?
Теория систем представляет собой научную дисциплину, которая изучает различные явления:
• отвлекаясь от их конкретной природы;
• основываясь лишь на формальных взаимосвязях между различными составляющими эти явления факторами и на характере их изменений под влиянием внешних условий;
• интересуясь самыми фундаментальными понятиями и аспектами систем.
Применение теории систем может сыграть главенствующую роль для решения следующих задач:
• изучение систем в условиях неопределенности;
• изучение сложных систем;
• разработка структуры моделей;
• междисциплинарный обмен научной информацией
11. В чем заключается проблема многосвязности автоматизированных систем?
При синтезе многомерных систем регулирования значительные затруднения связаны с наличием статических и динамических перекрестных связей между различными входами и выходами системы.
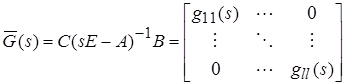
Если такие связи отсутствуют, а число управляющих воздействий равно числу наблюдаемых координат, то матричная передаточная функция разомкнутой; системы будет диагональной:
 (1.9)
(1.9)
Если диагональна также и матрица управления, то такой же будет матричная передаточная функция замкнутой системы, связывающая задание с выходом. При этом каждый отдельный контур регулирования может настраиваться независимо от остальных с использованием обычных методов классической теории регулирования.
К сожалению, для большинства многомерных задач регулирования характерна многосвязность по входам и выходам. Эффективность управления может быть значительно увеличена за счет использования более сложной системы, минимизирующей влияние взаимосвязей.
Неоднократно делались попытки определить степень связности многомерной системы. Наиболее широко используется для этого матрица Бристоля, характеризующая степень связности в статике.
Матрица Бристоля - это матрица вида
 (1.10)
(1.10)
элементы которой определяются в статике следующим образом:
 (1.11)
(1.11)
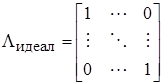
Анализ матрицы Λ позволяет указать несколько общих характеристик матриц Бристоля:
• сумма элементов любой строки или любого столбца равна единице:
• если передаточная матрица диагональна или треугольна, то соответствующая матрица Бристоля единична.
Из определения меры связности понятно, что наилучшей возможной ситуацией является близость к нулю недиагональных элементов и близость к единице диагональных элементов матрицы Бристоля
 (1.12)
(1.12)
В этом случае взаимосвязи несущественны, и поведение замкнутой системы аналогично поведению разомкнутой. Когда недиагональные элементы возрастают по модулю, а диагональные убывают, степень связности увеличивается.
Матрица Бристоля может служить основным средством для формирования; пар вход-выход.
Для динамических связей общепринятой меры связности, подобной матрице Бристоля, не существует.
Для улучшения качества многомерных систем регулирования применяют различные методы компенсации (или развязывания) перекрестных связей. Наиболее известным является метод синтеза стационарной автономной системы, заключающийся в определении передаточной матрицы компенсатора.
Однако автономное регулирование не всегда оказывается эффективным.
Если передаточная матрица объекта содержит элементы чистого запаздывания, то динамический компенсатор, как правило, должен включать элементы опережения, использующие будущие значения выходов. В чистом виде элементы опережения не могут быть реализованы, однако часто удается получить неплохие результаты, используя вместо них различные прогнозаторы. Слабым местом автономных систем является:
• приближенность модели при синтезе системы управления;
• наличие неустойчивых звеньев, компенсация которых затруднительна;
• возможное ухудшение динамических характеристик замкнутой системы при компенсации перекрестных связей.
Влияние статических перекрестных связей, вызванных изменениями задающих воздействий, можно исключить, применив компенсацию задающих воздействий. Это реализуется в системах управления, инвариантных или комбинированных по задающему воздействию.
Недостатком систем с автономностью по задающим воздействиям является то, что компенсатор не стоит в цепи обратной связи, и, следовательно, не улучшает качества системы по отношению к возмущениям.
Еще один подход к синтезу многомерных САУ дает теория модального управления. Она главным образом основывается на линейности рассматриваемых моделей. С помощью этой теории можно устанавливать желаемые значения собственных чисел замкнутой системы (корней характеристического уравнения).
Для синтеза модального управления необходимо точно знать матрицу и иметь возможность измерять все состояния.
Кроме вышеназванных, имеется еще целый ряд процедур (как правило, человеко-машинных) синтеза многомерных систем управления, позволяющих с помощью ЭВМ итеративно выбирать параметры обратных связей. Итерации продолжаются до тех пор, пока не будет обеспечено желаемое качество замкнутой системы.
Нарисуйте блок-схемы обучения искусственной нейронной сети (ИНС) в системах управления с учителем и стимулируемым самообучением.
Обучение искусственных нейронных сетей.
Для получения требуемых преобразовательных характеристик нейронная сеть должна быть настроена. Процедура настройки заключается в подборе значений синаптических весов для заданной топологии сети. Такая настройка называется процедурой обучения или тренировкой ИНС.
Различают два метода обучения: с учителем и стимулируемое самообучение (рис.).
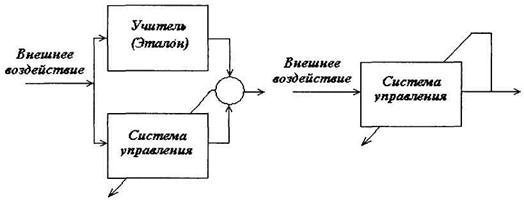
а) б)
Рис.. Виды обучения ИНС
а) обучение с учителем; б) самообучение
Обучение ИНС с учителем в теории управления принято называть обучением по эталону. Метод применяется в алгоритмах прогнозирования и диагностики, а также в задачах идентификации объектов управления (рис., а). В такой процедуре обучения для каждого воздействия внешней среды параметры ИНС настраиваются для получения заданной эталоном реакции сети.
Самообучение ИНС представляет процесс настройки параметров с целью достижения экстремального значения заданного критерия функционирования ИНС. Для автоматических систем регулирования это стандартная задача поиска настроечных параметров нейроконтроллера, реализуемого нейросетью (рис., б).
Дата добавления: 2015-04-18; просмотров: 85879; Мы поможем в написании вашей работы!; Нарушение авторских прав |